1.本发明属于消费品领域,具体为一种防抱死刹车控制系统。
背景技术:
2.通常自行车、助力自行车和电动车等前后两轮轻型载具,使用的刹车为碟刹、鼓刹等人力控制的机械刹车,制动力与用户手劲正相关,且前后轮分别需要独立由用户不同的手进行手动控制。一旦遇到紧急情况,用户大力刹车极易导致刹车抱死,此类载具与路面摩擦系数由静摩擦系数变为动摩擦系数,从而导致摩擦系数大幅下降而使制动距离大幅增加和载具方向失去控制的严重安全问题。
技术实现要素:
3.本发明的目的在于克服上述不足,提供一种体积小、重量轻、成本低,用于自行车、助力自行车和电动车等前后两轮轻型载具的电子式防抱死刹车控制系统,以提升自行车、助力自行车和电动车等前后两轮类载具的刹车安全性能,尤其是面对易滑路面以及紧急制动状况,极具应用价值。
4.本发明采取的技术方案具体如下:一种电子式防抱死刹车控制系统,包括防抱死刹车控制系统及与其电连接的载具转向角度传感器、载具前轮转速传感器、载具后轮转速传感器、前轮电控刹车模组、后轮电控刹车模组,当人机交互刹车信号输入时,所述载具转向角度传感器、载具前轮转速传感器、载具后轮传感器分别向接收电信号,同时判断是否向所述防抱死刹车控制系统传输电信号,所述防抱死刹车控制系统向前轮电控刹车模组与后轮电控刹车模组输入电信号,使前轮电控刹车模组或后轮电控刹车模组发生作用进行刹车。
5.所述防抱死刹车控制系统设置有最低载具行驶速度,当载具的速度大于最低载具行驶速度时,所述防抱死刹车控制系统启动。
6.所述载具转向角度传感器用于检测载具的转向角度,载具的转向角度的绝对值小于90
°
。
7.所述载具前轮转速传感器与载具后轮转速传感器可分别对载具的前轮与后轮进行检测,且计算出载具前后轮的速度,取两者的最大速度作为载具的速度。
8.所述载具前轮转速传感器与载具后轮转速传感器检测出的前后轮转速分别与前后轮的速度成正比,且前后轮转速分别与前后轮的半径成反比。
9.所述防抱死刹车控制系统与电子信号控制的刹车配合使用。
10.所述防抱死刹车控制系统,因为该系统需要刹车制动力快速响应系统控制信号,需要与电子信号控制的刹车配合使用,且系统工作流程包括如下步骤:步骤一,系统获取人机交互刹车信号输入值,采集载具转向角度传感器、载具前轮转速传感器、载具后轮转速传感器的数据;步骤二,如果人机交互刹车信号输入值为0且载具上其他有制动作用的功能(如动
能回收功能等)被禁用,则恢复禁用的功能;步骤三,使用前、后轮转速传感器数据,计算出载具前、后轮速度,两者取最大值作为载具速度;步骤四,如果载具速度小于启用刹车防抱死功能所需最低载具行驶速度,则载具前后轮刹车力度均按照系统获取的人机交互刹车信号输入值执行并跳转至步骤十;步骤五,根据前轮转速、后轮转速、对应轮半径数据可计算出前轮速度和后轮速度,再根据转向角度数据可利用三角函数计算出前后轮速度值是否匹配;步骤六,如果前后轮速度匹配,则载具前后轮刹车力度均按照系统获取的人机交互刹车信号输入值执行并跳转至步骤十;步骤七,禁用载具上其他有制动能力的功能(如动能回收功能等)。
11.步骤八,前后轮因为轮速过低不匹配的一方触发防抱死行为,刹车力度按零执行。
12.步骤九,前后轮因为轮速过高不匹配的一方按照系统获取的人机交互刹车信号输入值执行刹车力度。
13.步骤十,返回步骤一,进入下一次循环。
14.本发明取得的技术效果为:(1)本发明在不怎么增加体积、重量、成本的前提下,可为自行车、助力自行车和电动车等前后两轮轻型载具提供防抱死刹车功能,弥补了防抱死刹车功能在此类载具上的空白,大幅增强此类载具在泥泞湿滑路面行驶时,以及在紧急制动状态时的安全性,减少刹车距离并降低失控风险,因此该系统极具工程实用价值。
15.(2)在使用本发明提供的方法后,同等硬件条件下,可有效抑制刹车抱死,尽量使轮胎与地面处于静摩擦状态,从而缩短刹车距离并最大程度避免方向控制失灵的问题,以提升刹车安全性能。
附图说明
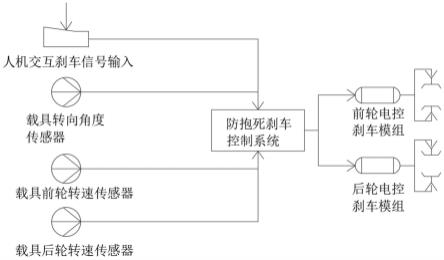
16.图1是本发明的实施例所提供的信号传递流程图。
具体实施方式
17.为了使本发明的目的及优点更加清楚明白,以下结合实施例对本发明进行具体说明。应当理解,以下文字仅仅用以描述本发明的一种或几种具体的实施方式,并不对本发明具体请求的保护范围进行严格限定。
18.如图1所示,一种电子式防抱死刹车控制系统,包括防抱死刹车控制系统及与其电连接的载具转向角度传感器、载具前轮转速传感器、载具后轮转速传感器、前轮电控刹车模组、后轮电控刹车模组,当人机交互刹车信号输入时,所述载具转向角度传感器、载具前轮转速传感器、载具后轮传感器分别向接收电信号,同时判断是否向所述防抱死刹车控制系统传输电信号,所述防抱死刹车控制系统向前轮电控刹车模组与后轮电控刹车模组输入电信号,使前轮电控刹车模组或后轮电控刹车模组发生作用进行刹车。
19.参照附图1,防抱死刹车控制系统设置有最低载具行驶速度,当载具的速度大于最低载具行驶速度时,所述防抱死刹车控制系统启动。
20.参照附图1,载具转向角度传感器用于检测载具的转向角度,载具的转向角度的绝
对值小于90
°
。
21.参照附图1,载具前轮转速传感器与载具后轮转速传感器可分别对载具的前轮与后轮进行检测,且计算出载具前后轮的速度,取两者的最大速度作为载具的速度。
22.参照附图1,载具前轮转速传感器与载具后轮转速传感器检测出的前后轮转速分别与前后轮的速度成正比,且前后轮转速分别与前后轮的半径成反比。
23.参照附图1,防抱死刹车控制系统与电子信号控制的刹车配合使用。
24.本实例提供一种防抱死刹车控制系统,为方便说明本发明的工作流程步骤,先做以下预置定义及条件描述:实例载具为拥有动能回收功能的两轮电动车,转向轮为前轮;rec—布尔量,1为启用动能回收功能,0为禁用;r
前
、r
后
—载具前轮半径、载具后轮半径;v
abs
—启用刹车防抱死功能所需最低载具行驶速度(例如2m/s);d—容忍度常数(例如0.1),该值大于0,小于1,数值越小越敏感,越容易触发刹车防抱死行为;absenable—布尔量,刹车防抱死系统使能标志位,0为禁用,1为启用;absact、absact
前
、absact
后
—均为布尔量,表示是否触发刹车防抱死行为的标志位,0为不触发,1为触发防抱死,依次为载具整体是否触发、载具前轮是否触发、载具后轮是否触发;b
in
—人机交互刹车信号输入,范围0~1,0为不刹车,1为全力刹车;b
out前
、b
out后
—向前、后轮刹车模组发送的控制信号,0为不刹车,1为全力刹车;θ—载具转向角,绝对值小于90度;
ø
前
、
ø
后
—载具前、后轮转速;v、v
前
、v
后
—载具速度、载具前轮速度、载具后轮速度;max(x, y)—自定义函数,输出x与y中最大的值;min(x, y)—自定义函数,输出x与y中最小的值。
25.步骤一,系统获取b
in
、θ、
ø
前
、
ø
后
值。
26.步骤二,如果b
in == 0,则rec = 1。
27.步骤三,如果
ø
前 《 0则
ø
前 = 0,如果
ø
后 《 0则
ø
后 = 0,v
前 = r
前 *
ꢀø
前
,v
后 = r
后 *
ꢀø
后
,v = max(v
前
, v
后
),absenable = (v 》 v
abs
)。
28.步骤四,如果absenable则:absact = ((d min(v
前 * cosθ, v
后
) / max(v
前 * cosθ, v
后
)) 《 1),absact
前 = absact && (v
前 * cosθ 《 v
后
),absact
后 = absact && (v
前 * cosθ 》 v
后
),b
out前 = b
in * ! absact
前
,bout后 = b
in * ! absact
后
。
29.步骤五,如果! absenable则:b
out前 = b
in
,b
out后 = b
in
。
30.步骤六,如果(absenable && absact)则rec = 0。
31.步骤七,系统按照计算结果b
out前
、b
out后
执行刹车,分别向前、后轮电控刹车模组发送控制信号。
32.步骤八,返回步骤一,进入下一次循环。
33.以电动两轮车为例,无论配备的是碟刹还是鼓刹,在泥泞湿滑路面状况以及紧急制动状态下,都容易出现刹车抱死的情况,从而导致刹车距离变长以及车辆方向控制失灵的情况,引起安全问题。
34.在使用本发明提供的方法后,同等硬件条件下,可有效抑制刹车抱死,尽量使轮胎与地面处于静摩擦状态,从而缩短刹车距离并最大程度避免方向控制失灵的问题,以提升刹车安全性能。
35.本发明提出的方法适用于多种前后两轮式轻型载具,包括但不仅限于自行车、助力自行车、两轮电动车等。
36.本发明的工作原理为:本系统体积小、重量轻、成本低,可用于自行车、助力自行车和电动车等前后两轮轻型载具,在刹车时侦测是否出现刹车抱死现象,并通过短暂松开刹车抑制刹车抱死,使此类载具刹车时尽可能与地面处于静摩擦状态下,避免进入摩擦系数更低的动摩擦状态,从而降低此类载具在易打滑路面上的刹车距离;与此同时也避免了此类载具与路面之间进入动摩擦状态而导致的方向操控失灵的问题。
37.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进或变形,这些改进或变形也应视为本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
