1.本发明涉及用于驱动车轮的车辆用驱动装置。
背景技术:
2.在下述的专利文献1中公开了这样的车辆用驱动装置的一例。以下,在该背景技术的说明(“背景技术”以及“发明要解决的问题”的说明)中,将专利文献1中的附图标记引用在括号内。
3.专利文献1的车辆用驱动装置构成为能够根据车辆的状态来切换工作模式。具体而言,在专利文献1的车辆用驱动装置中,在蓄电装置(7)的充电量比较少的情况下,旋转电机(5)输出内燃机(1)的输出扭矩的反作用力扭矩,通过内燃机(1)和旋转电机(5)的合成扭矩,切换为推进车辆的动力分流模式。另一方面,在蓄电装置(7)为满充电状态的情况下,旋转电机(5)对内燃机(1)的输出扭矩加上扭矩,切换为通过内燃机(1)以及旋转电机(5)双方的输出扭矩来推进车辆的并联混合动力模式。
4.现有技术文献
5.专利文献
6.专利文献1:日本特开平9-46820号公报
技术实现要素:
7.发明要解决的问题
8.如上所述,在专利文献1的车辆用驱动装置中,当蓄电装置(7)的充电量比较小的情况下,切换为动力分流模式。在动力分流模式下,能够使旋转电机(5)进行发电而对蓄电装置(7)进行充电。然而,例如在车速高的情况下等,根据车辆的状态,存在在动力分流模式下旋转电机(5)不能进行发电的情况。这样,在专利文献1的车辆用驱动装置中,存在不能充分地确保蓄电装置(7)的充电量的可能性。
9.因此,期望实现能够充分地确保蓄电装置的充电量的车辆用驱动装置。
10.用于解决问题的手段
11.鉴于上述情况,车辆用驱动装置的特征结构在于,该车辆用驱动装置为一种用于驱动车辆的前轮以及后轮的车辆用驱动装置,其中,
12.将所述前轮以及所述后轮中的一方作为第一车轮,将另一方作为第二车轮,
13.所述车辆用驱动装置具备:
14.第一驱动单元,其具备与所述车辆所具备的内燃机驱动连接的输入部件以及第一驱动力源,驱动所述第一车轮;
15.第二驱动单元,其具备第二驱动力源,驱动所述第二车轮;以及
16.控制装置,其控制所述第一驱动单元、所述第二驱动单元以及所述内燃机,
17.所述第一驱动力源为在与蓄电装置之间进行电力授受的旋转电机,
18.所述第一驱动单元具备第一模式和第二模式作为工作模式,
19.在所述第一模式下处于如下状态:在所述内燃机与所述第一车轮之间的动力传递被切断,并且在所述第一驱动力源与所述第一车轮之间进行动力传递,
20.在所述第二模式下处于以下状态:在所述内燃机与所述第一驱动力源之间进行动力传递,并且在所述内燃机以及所述第一驱动力源双方与所述第一车轮之间的动力传递被切断,所述第一驱动力源通过从所述内燃机传递的驱动力进行发电,
21.在所述蓄电装置的充电量小于规定的第一阈值且所述车辆的速度小于规定的第二阈值的情况下,
22.在所述车辆的速度为零以上且所述车辆所要求的驱动力即要求驱动力为零以上的情况下,所述控制装置以将所述第一驱动单元的所述工作模式设为所述第二模式,通过所述第二驱动单元输出所述要求驱动力的方式进行控制,
23.在所述车辆的速度大于零且所述要求驱动力小于零的情况下,所述控制装置以将所述第一驱动单元的所述工作模式设为所述第一模式,使所述第一驱动力源进行基于再生的发电,并且使所述内燃机处于工作状态,通过所述第一驱动单元以及所述第二驱动单元双方输出所述要求驱动力的方式进行控制。
24.根据该特征结构,控制装置在蓄电装置的充电量小于第一阈值且车辆的速度小于第二阈值的情况下,在车辆要继续停车的情况、车辆要加速的情况、或者车辆要以一定的速度行驶的情况下,以将第一驱动单元的工作模式设为第二模式,通过第二驱动单元输出要求驱动力的方式进行控制。在第二模式下,处于第一驱动力源通过从内燃机传递的驱动力进行发电的状态。因此,能够在通过第二驱动单元确保必要的驱动力的同时,利用内燃机的驱动力通过第一驱动力源进行发电。因此,能够在车辆停车中、加速中以及以一定的速度行驶中,适当地进行蓄电装置的充电。
25.另外,控制装置在蓄电装置的充电量小于第一阈值且车辆的速度小于第二阈值的情况下,在车辆要减速的情况下,以将第一驱动单元的工作模式设为第一模式,使第一驱动力源进行基于再生的发电,并且将内燃机设为工作状态,通过第一驱动单元以及第二驱动单元双方输出要求驱动力的方式进行控制。因此,能够利用车辆的惯性力通过第一驱动力源进行发电。另外,由于此时不使内燃机停止而使其处于工作状态,所以在车辆的减速结束后,也能够提前将第一驱动单元的工作模式转变到第二模式,继续进行蓄电装置的充电。因此,在车辆的减速中,能够在能迅速地进行减速结束后的模式转变的状态下,适当地进行蓄电装置的充电。
26.如上所述,根据本结构,在车辆的停车中、以及以比较低的速度行驶的车辆以一定速度行驶中、加速中以及减速中,能够分别适当地进行蓄电装置的充电。因此,能够充分地确保蓄电装置的充电量。
附图说明
27.图1是实施方式所涉及的车辆用驱动装置的第一驱动单元的骨架图。
28.图2是实施方式所涉及的车辆用驱动装置的第二驱动单元的骨架图。
29.图3是实施方式所涉及的车辆用驱动装置的控制框图。
30.图4是表示实施方式所涉及的车辆用驱动装置的各工作模式中的接合装置的状态的图。
31.图5是实施方式所涉及的第四模式中的分配用差动齿轮机构以及变速器的速度线图。
32.图6是实施方式所涉及的第一模式以及第三模式中的分配用差动齿轮机构以及变速器的速度线图。
33.图7是表示实施方式所涉及的控制装置的控制处理的一例的流程图。
34.图8是表示车辆从停车状态起步时的现有的控制处理的一例的时序图。
35.图9是表示车辆从停车状态起步时的实施方式所涉及的控制装置的控制处理的一例的时序图。
36.图10是表示车辆从行驶状态停车时的现有的控制处理的一例的时序图。
37.图11是表示车辆从行驶状态停车时的实施方式所涉及的控制装置的控制处理的一例的时序图。
具体实施方式
38.以下,参照附图对实施方式所涉及的车辆用驱动装置100进行说明。如图1以及图2所示,车辆用驱动装置100具备驱动一对第一车轮w1的第一驱动单元100a和驱动一对第二车轮w2的第二驱动单元100b。在本实施方式中,第一车轮w1是车辆的前轮,第二车轮w2是车辆的后轮。
39.如图1所示,第一驱动单元100a具备与车辆所具备的内燃机eg驱动连接的输入部件i以及作为第一车轮w1的驱动力源而发挥作用的第一驱动力源d1。在本实施方式中,第一驱动单元100a还具备与第一车轮w1驱动连接的第一输出部件o1、分配用差动齿轮机构sp、变速器tm、第一输出用差动齿轮机构df1、第一接合装置cl1以及第二接合装置cl2。
40.在此,在本技术中,“驱动连接”是指两个旋转元件以能够传递驱动力的方式连接的状态,包括该两个旋转元件以一体旋转的方式连接的状态或者该两个旋转元件经由一个或两个以上的传动部件以能够传递驱动力的方式连接的状态。作为这样的传动部件,包括以同速或变速传递旋转的各种部件,例如轴、齿轮机构、带、链等。另外,作为传动部件,也可以包括选择性地传递旋转以及驱动力的接合装置,例如摩擦接合装置、啮合式接合装置等。但是,在针对行星齿轮机构的各旋转元件称为“驱动连接”的情况下,是指行星齿轮机构中的多个旋转元件彼此不经由其他旋转元件而连接的状态。
41.在本实施方式中,输入部件i、分配用差动齿轮机构sp、第一接合装置cl1以及第二接合装置cl2配置在作为它们的旋转轴心的第一轴x1上。并且,第一驱动力源d1配置在作为其旋转轴心的第二轴x2上。此外,变速器tm配置在作为其旋转轴心的第三轴x3上。另外,第一输出部件o1以及第一输出用差动齿轮机构df1配置在作为它们的旋转轴心的第四轴x4上。
42.如图2所示,第二驱动单元100b具备作为第二车轮w2的驱动力源而发挥作用的第二驱动力源d2。在本实施方式中,第二驱动单元100b还具备与第二车轮w2驱动连接的第二输出部件o2、副轴齿轮(counter gear)机构cg、以及第二输出用差动齿轮机构df2。
43.在本实施方式中,第二驱动力源d2配置在作为其旋转轴心的第五轴x5上。并且,副轴齿轮机构cg配置在作为其旋转轴心的第六轴x6上。另外,第二输出部件o2以及第二输出用差动齿轮机构df2配置在作为它们的旋转轴心的第七轴x7上。
44.在本例中,上述的轴x1~x7相互平行地配置。在以下的说明中,将与上述的轴x1~x7平行的方向作为车辆用驱动装置100的“轴向l”。并且,如图1所示,在轴向l上,将相对于内燃机eg配置有输入部件i的一侧作为“轴向第一侧l1”,将其相反侧作为“轴向第二侧l2”。另外,将与上述的轴x1~x7分别正交的方向作为以各轴为基准的“径向r”。另外,在不需要区别以哪个轴为基准的情况下,或在明确以哪个轴为基准的情况下,存在仅记为“径向r”的情况。
45.在本实施方式中,输入部件i是沿着轴向l延伸的输入轴1。输入轴1经由对所传递的扭矩的变动进行衰减的减震装置dp而与内燃机eg的输出轴eo驱动连接。内燃机eg是通过燃料的燃烧而被驱动并取出动力的原动机(汽油发动机、柴油发动机等)。在本实施方式中,内燃机eg作为第一车轮w1的驱动力源发挥作用。
46.在本实施方式中,第一驱动力源d1为在与蓄电装置bt(参照图3)之间进行电力授受的第一旋转电机mg1。第一旋转电机mg1具有接受电力的供给而产生动力的作为发动机(电动机)的功能以及接受动力的供给而产生电力的作为发电机(发电机)的功能。具体而言,第一旋转电机mg1与蓄电池或电容器等蓄电装置bt电连接。并且,第一旋转电机mg1通过蓄积于蓄电装置bt的电力进行动力运行而产生驱动力。另外,第一旋转电机mg1通过内燃机eg的驱动力或从第一输出部件o1侧传递的驱动力进行发电而对蓄电装置bt进行充电。
47.第一旋转电机mg1具备第一定子st1以及第一转子ro1。第一定子st1固定于非旋转部件(例如,收容第一旋转电机mg1等的壳体)。第一转子ro1相对于第一定子st1旋转自如地被支承。在本实施方式中,第一转子ro1相对于第一定子st1配置在径向r的内侧。
48.分配用差动齿轮机构sp具备第一旋转元件e1、第二旋转元件e2以及第三旋转元件e3。第一旋转元件e1与输入部件i驱动连接。第二旋转元件e2与第一输出部件o1驱动连接。第三旋转元件e3与第一驱动力源d1驱动连接。
49.在本实施方式中,分配用差动齿轮机构sp是具备第一太阳齿轮s1、第一行星齿轮架c1以及第一齿圈r1的行星齿轮机构。在本例中,分配用差动齿轮机构sp是具备支承第一小齿轮p1的第一行星齿轮架c1、与第一小齿轮p1啮合的第一太阳齿轮s1以及相对于该第一太阳齿轮s1配置在径向r的外侧且与第一小齿轮p1啮合的第一齿圈r1的单小齿轮型的行星齿轮机构。
50.分配用差动齿轮机构sp的旋转元件的旋转速度的顺序为第一旋转元件e1、第二旋转元件e2、第三旋转元件e3。因此,在本实施方式中,第一旋转元件e1是第一太阳齿轮s1。并且,第二旋转元件e2是第一行星齿轮架c1。另外,第三旋转元件e3是第一齿圈r1。
51.在此,“旋转速度的顺序”是指各旋转元件的旋转状态下的旋转速度的顺序。各旋转元件的旋转速度根据行星齿轮机构的旋转状态而变化,但各旋转元件的旋转速度的高低的排列顺序是由行星齿轮机构的结构决定的,因此是固定的。另外,各旋转元件的旋转速度的顺序与各旋转元件在速度线图(参照图5、6等)中的配置顺序相同。在此,“各旋转元件在速度线图中的配置顺序”是指,速度线图中的与各旋转元件对应的轴沿着与该轴正交的方向配置的顺序。速度线图中的与各旋转元件对应的轴的配置方向根据速度线图的描绘方法而不同,但该配置顺序是由行星齿轮机构的结构决定的,因此是固定的。
52.如图1所示,在本实施方式中,第一驱动单元100a具备与第一旋转电机mg1的第一转子ro1一体旋转的第一齿轮g1、以及与第一齿轮g1驱动连接的第二齿轮g2。在图示的例子
中,第一齿轮g1和第二齿轮g2经由空转齿轮ig驱动连接。空转齿轮ig分别与第一齿轮g1以及第二齿轮g2啮合。
53.在本实施方式中,第一齿轮g1配置在第二轴x2上。并且,第一齿轮g1经由沿轴向l延伸的第一转子轴rs1以与第一转子ro1一体旋转的方式连接。
54.在本实施方式中,第二齿轮g2配置在第一轴x1上。并且,第二齿轮g2相对于分配用差动齿轮机构sp的第一齿圈r1配置在径向r的外侧且在沿径向r的径向观察时与分配用差动齿轮机构sp重叠的位置。在此,关于两个元件的配置,“在特定方向观察时重叠”是指,在使与该视线方向平行的假想直线在与该假想直线正交的各方向上移动的情况下,至少一部分存在该假想直线与两个元件双方相交的区域。
55.另外,在本实施方式中,第二齿轮g2以一体旋转的方式与第一齿圈r1连接。在本例中,设置有以第一轴x1为轴心的筒状的齿轮形成部件2。并且,在齿轮形成部件2的外周面形成有第二齿轮g2,在齿轮形成部件2的内周面形成有第一齿圈r1。
56.变速器tm具备第三接合装置cl3。变速器tm将从分配用差动齿轮机构sp传递来的旋转以与由第三接合装置cl3形成的变速档对应的变速比进行变速并传递至第一输出部件o1。另外,变速器tm在与由第三接合装置cl3形成的变速档对应的变速比为1的情况下,将从分配用差动齿轮机构sp传递来的旋转直接传递至第一输出部件o1。在本实施方式中,第三接合装置cl3形成变速比比较大的第一变速档(低速档)st1和变速比比该第一变速档st1小的第二变速档(高速档)st2中的任意一个。
57.在本实施方式中,变速器tm具有第三齿轮g3、第四齿轮g4、第五齿轮g5、第六齿轮g6以及变速输出齿轮3。在本实施方式中,第三齿轮g3以及第四齿轮g4配置在第一轴x1上。并且,第五齿轮g5、第六齿轮g6以及变速输出齿轮3配置在第三轴x3上。
58.第三齿轮g3以一体旋转的方式与分配用差动齿轮机构sp的第一行星齿轮架c1连接。在本实施方式中,第三齿轮g3相对于分配用差动齿轮机构sp配置在轴向第一侧l1。另外,在本实施方式中,在沿着径向r的径向观察时,第一旋转电机mg1配置在与第三齿轮g3和分配用差动齿轮机构sp双方重叠的位置。
59.第四齿轮g4以一体旋转的方式与分配用差动齿轮机构sp的第一齿圈r1连接。在本实施方式中,第四齿轮g4相对于第一齿圈r1配置在径向r的外侧且在沿着径向r的径向观察时与分配用差动齿轮机构sp重叠的位置。即,在本实施方式中,变速器tm和分配用差动齿轮机构sp以在沿径向r的径向观察时相互重叠的方式被配置。在图示的例子中,变速器tm的构成部件中的第四齿轮g4以及第六齿轮g6在径向观察时与分配用差动齿轮机构sp重叠。另外,第三接合装置cl3也在径向观察时与分配用差动齿轮机构sp重叠。另外,在本例中,第四齿轮g4也作为第二齿轮g2发挥作用。换言之,第二齿轮g2和第四齿轮g4作为一个齿轮形成在齿轮形成部件2的外周面上。因此,与第二齿轮g2和第四齿轮g4独立设置的结构相比,能够降低车辆用驱动装置100(第一驱动单元100a)的制造成本。
60.第五齿轮g5与第三齿轮g3啮合。第六齿轮g6与第四齿轮g4啮合。在本实施方式中,第六齿轮g6在第四齿轮g4(第二齿轮g2)的周向上的与第一齿轮g1不同的位置与第四齿轮g4啮合。变速输出齿轮3构成为能够相对于第五齿轮g5以及第六齿轮g6相对旋转。
61.第三齿轮g3的齿数与第四齿轮g4的齿数不同。即,第三齿轮g3的外径与第四齿轮g4的外径不同。并且,如上所述,第三齿轮g3和第四齿轮g4配置在同轴上,并且与第三齿轮
g3啮合的第五齿轮g5和与第四齿轮g4啮合的第六齿轮g6配置在同轴上。因此,在第三齿轮g3的外径小于第四齿轮g4的外径的情况下,第五齿轮g5的外径大于第六齿轮g6的外径。另一方面,第三齿轮g3的外径大于第四齿轮g4的外径的情况下,第五齿轮g5的外径小于第六齿轮g6的外径。因此,第五齿轮g5相对于第三齿轮g3的齿数比与第六齿轮g6相对于第四齿轮g4的齿数比不同。在本实施方式中,第三齿轮g3的外径小于第四齿轮g4的外径,第三齿轮g3的齿数比第四齿轮g4的齿数少。因此,在本实施方式中,第五齿轮g5的外径大于第六齿轮g6的外径,第五齿轮g5的齿数比第六齿轮g6的齿数多。因此,第五齿轮g5相对于第三齿轮g3的齿数比大于第六齿轮g6相对于第四齿轮g4的齿数比。
62.在本实施方式中,第三接合装置cl3构成为将第五齿轮g5以及第六齿轮g6中的任意一个与变速输出齿轮3连接。如上所述,在本实施方式中,第五齿轮g5相对于第三齿轮g3的齿数比大于第六齿轮g6相对于第四齿轮g4的齿数比。因此,在第三接合装置cl3使第五齿轮g5与变速输出齿轮3连接的情况下,形成变速比大于第二变速档st2的第一变速档(低速档)st1。另一方面,在第三接合装置cl3使第六齿轮g6与变速输出齿轮3连接的情况下,形成变速比小于第一变速档st1的第二变速档(高速档)st2。
63.此外,在本实施方式中,第三接合装置cl3构成为能够切换为既不形成第一变速档st1也不形成第二变速档st2的空档状态。在第三接合装置cl3处于空档状态的情况下,变速器tm处于不将分配用差动齿轮机构sp传递来的旋转传递给第一输出部件o1的状态,即,处于内燃机eg以及第一旋转电机mg1的驱动力都不传递至第一车轮w1的状态。
64.第三接合装置cl3形成第一变速档st1以及第二变速档st2中的任意一个的状态相当于第三接合装置cl3的接合状态。另一方面,第三接合装置cl3的空档状态相当于第三接合装置cl3的分离状态。在本例中,第三接合装置cl3是能够通过螺线管、电动机、液压缸等致动器来切换接合状态和分离状态的啮合式接合装置(爪形离合器)。
65.第一输出用差动齿轮机构df1构成为将第一输出部件o1的旋转分配给一对第一车轮w1。在本实施方式中,第一输出部件o1是与变速输出齿轮3啮合的第一差动输入齿轮4。
66.在本实施方式中,第一输出用差动齿轮机构df1是锥齿轮型的差动齿轮机构。具体而言,第一输出用差动齿轮机构df1具备中空的第一差动壳体、以与该第一差动壳体一体旋转的方式被支承的第一小齿轮轴、被支承为能够相对于该第一小齿轮轴旋转的一对第一小齿轮以及与该一对第一小齿轮啮合且作为分配输出元件而发挥作用的一对第一侧齿轮。第一小齿轮轴、一对第一小齿轮以及一对第一侧齿轮收容在第一差动壳体中。在本实施方式中,作为第一输出部件o1的第一差动输入齿轮4以向该第一差动壳体的径向r的外侧突出的方式与第一差动壳体连接。并且,与第一车轮w1驱动连接的第一驱动轴ds1能够一体旋转地与一对第一侧齿轮分别连接。这样,第一输出用差动齿轮机构df1经由一对第一驱动轴ds1将第一输出部件o1(第一差动输入齿轮4)的旋转分配给一对第一车轮w1。
67.第一接合装置cl1是断开/连接输入部件i与分配用差动齿轮机构sp的第一旋转元件e1之间的动力传递的接合装置。在本实施方式中,第一接合装置cl1构成为断开/连接输入部件i与第一太阳齿轮s1之间的动力传递。在本例中,第一接合装置cl1是具备一对摩擦部件且通过液压来控制该一对摩擦部件彼此的接合状态的摩擦接合装置。因此,能够使第一接合装置cl1处于打滑接合状态,控制第一接合装置cl1的传递扭矩容量。因此,在利用第一旋转电机mg1的驱动力来起动内燃机eg的情况下,能够控制从第一旋转电机mg1向内燃机
eg传递的扭矩,因此不需要使第一旋转电机mg1暂时停止。在此,“打滑接合状态”是指,在摩擦接合装置的一对摩擦部件之间存在旋转速度差(打滑)的接合状态。
68.第二接合装置cl2是断开/连接从分配用差动齿轮机构sp中的第一旋转元件e1、第二旋转元件e2以及第三旋转元件e3这三个旋转元件中选择的两个元件之间的动力传递的接合装置。在本实施方式中,第二接合装置cl2构成为断开/连接作为第二旋转元件e2的第一行星齿轮架c1与作为第三旋转元件e3的第一齿圈r1之间的动力传递。并且,第二接合装置cl2在轴向l上配置在第一接合装置cl1与分配用差动齿轮机构sp之间。在本例中,第二接合装置cl2是构成为能够通过螺线管、电动机、液压缸等致动器来切换接合状态和分离状态的啮合式接合装置(爪形离合器)。
69.如图2所示,在本实施方式中,第二驱动力源d2是在蓄电装置bt(参照图3)之间进行电力授受的第二旋转电机mg2。第二旋转电机mg2具有接收电力的供给而产生动力的作为发动机(电动机)的功能以及接受动力的供给而产生电力的作为发电机(发电机)的功能。具体而言,第二旋转电机mg2与蓄电装置bt电连接。并且,第二旋转电机mg2通过蓄积于蓄电装置bt的电力进行动力运行而产生驱动力。另外,在再生期间,第二旋转电机mg2通过从第二输出部件o2侧传递来的驱动力进行发电而对蓄电装置bt进行充电。
70.第二旋转电机mg2具备第二定子st2以及第二转子ro2。第二定子st2固定于非旋转部件(例如,收容第二旋转电机mg2等的壳体)。第二转子ro2相对于第二定子st2旋转自如地被支承。在本实施方式中,第二转子ro2相对于第二定子st2配置在径向r的内侧。
71.在本实施方式中,第二驱动单元100b具备与第二转子ro2一体旋转的转子齿轮5。转子齿轮5配置在第五轴x5上。并且,转子齿轮5经由沿轴向l延伸的第二转子轴rs2以与第二转子ro2一体旋转的方式连接。
72.副轴齿轮机构cg具备副轴输入齿轮61、副轴输出齿轮62以及将这些齿轮61、62以一体旋转的方式连接的副轴63。
73.副轴输入齿轮61为副轴齿轮机构cg的输入元件。副轴输入齿轮61与转子齿轮5啮合。
74.副轴输出齿轮62为副轴齿轮机构cg的输出元件。在本实施方式中,副轴输出齿轮62配置在比副轴输入齿轮61更靠轴向第二侧l2的位置。另外,在本实施方式中,副轴输出齿轮62形成为直径比副轴输入齿轮61的直径小。
75.第二输出用差动齿轮机构df2构成为将第二输出部件o2的旋转分配给一对第二车轮w2。在本实施方式中,第二输出部件o2是与副轴齿轮机构cg的副轴输出齿轮62啮合的第二差动输入齿轮7。
76.在本实施方式中,第二输出用差动齿轮机构df2是锥齿轮型的差动齿轮机构。具体而言,第二输出用差动齿轮机构df2具备中空的第二差动壳体、以与该第二差动壳体一体旋转的方式被支承的第二小齿轮轴、被支承为能够相对于该第二小齿轮轴旋转的一对第二小齿轮以及与该一对第二小齿轮啮合且作为分配输出元件而发挥作用的一对第二侧齿轮。第二小齿轮轴、一对第二小齿轮以及一对第二侧齿轮收容在第二差动壳体中。在本实施方式中,作为第二输出部件o2的第二差动输入齿轮7以向该第二差动壳体的径向r的外侧突出的方式与第二差动壳体连接。并且,与第二车轮w2驱动连接的第二驱动轴ds2能够一体旋转地与一对第二侧齿轮分别连接。这样,第二输出用差动齿轮机构df2经由一对第二驱动轴ds2
将第二输出部件o2(第二差动输入齿轮7)的旋转分配给一对第二车轮w2。
77.如图3所示,车辆用驱动装置100具备控制第一驱动单元100a、第二驱动单元100b以及内燃机eg的控制装置10。在本实施方式中,控制装置10具备主控制部11、控制内燃机eg的内燃机控制部12、控制第一旋转电机mg1的第一旋转电机控制部13、控制第二旋转电机mg2的第二旋转电机控制部14以及控制第一接合装置cl1、第二接合装置cl2以及第三接合装置cl3的接合状态的接合控制部15。
78.主控制部11分别向内燃机控制部12、第一旋转电机控制部13、第二旋转电机控制部14以及接合控制部15输出控制各控制部所负责的装置的指令。内燃机控制部12控制内燃机eg,使得内燃机eg输出由主控制部11指令的目标扭矩,或者,成为由主控制部11指令的目标旋转速度。第一旋转电机控制部13控制第一旋转电机mg1,使得第一旋转电机mg1输出由主控制部11指令的目标扭矩,或者,成为由主控制部11指令的目标旋转速度。第二旋转电机控制部14控制第二旋转电机mg2,使得第二旋转电机mg2输出由主控制部11指令的目标扭矩,或者,成为由主控制部11指令的目标旋转速度。接合控制部15以使第一接合装置cl1、第二接合装置cl2以及第三接合装置cl3分别成为由主控制部11指令的接合状态的方式,控制用于使第一接合装置cl1、第二接合装置cl2以及第三接合装置cl3工作的致动器(省略图示)。
79.另外,主控制部11为了获取搭载有车辆用驱动装置100的车辆的各部的信息,构成为能够获取来自设置于该车辆的各部的传感器的信息。在本实施方式中,主控制部11构成为能够获取来自soc传感器se1、车速传感器se2、加速器操作量传感器se3、制动器操作量传感器se4以及换档位置传感器se5的信息。
80.soc传感器se1是与第一旋转电机mg1以及第二旋转电机mg2电连接的用于检测蓄电装置bt的状态的传感器。soc传感器se1例如由电压传感器或电流传感器等构成。主控制部11基于从soc传感器se1输出的电压值或电流值等信息,计算蓄电装置bt的充电量(soc:充电状态)。
81.车速传感器se2是用于检测搭载有车辆用驱动装置100的车辆的行驶速度的传感器。在本实施方式中,车速传感器se2是用于检测第一输出部件o1的旋转速度的传感器。主控制部11基于从车速传感器se2输出的上述旋转速度的信息,计算第一输出部件o1的旋转速度(角速度)。由于第一输出部件o1的旋转速度与车速成比例,因此主控制部11基于车速传感器se2的检测信号计算车速。
82.加速器操作量传感器se3是用于检测驾驶员对设置在搭载有车辆用驱动装置100的车辆上的加速踏板的操作量的传感器。主控制部11基于加速器操作量传感器se3的检测信号,计算驾驶员对加速踏板的操作量。
83.制动器操作量传感器se4是用于检测驾驶员对设置在搭载有车辆用驱动装置100的车辆上的制动踏板的操作量的传感器。主控制部11基于制动器操作量传感器se4的检测信号,计算驾驶员对制动踏板的操作量。
84.换档位置传感器se5是用于检测由搭载有车辆用驱动装置100的车辆的驾驶员操作的换档杆的选择位置(换档位置)的传感器。主控制部11基于换档位置传感器se5的检测信号计算出换档位置。换档杆构成为能够选择停车档(p档)、后退行驶档(r档)、空档(n档)以及前进行驶档(d档)等。
85.主控制部11基于来自上述的传感器se1~se5的信息,进行后述的第一驱动单元100a中的多个工作模式的选择。主控制部11经由接合控制部15将第一接合装置cl1、第二接合装置cl2以及第三接合装置cl3分别控制为与所选择的工作模式对应的接合状态,由此进行向该所选择的工作模式的切换。此外,主控制部11经由内燃机控制部12、第一旋转电机控制部13以及第二旋转电机控制部14对内燃机eg、第一旋转电机mg1以及第二旋转电机mg2的工作状态进行协调控制,由此能够进行与所选择的工作模式对应的适当的车辆的行驶。
86.如图4所示,在本实施方式中,第一驱动单元100a作为工作模式具备电气式变矩器模式(以下记为“etc模式”)、第一ev模式、第二ev模式、第一hv模式、第二hv模式以及充电模式。
87.图4表示本实施方式的第一驱动单元100a的各工作模式下的第一接合装置cl1、第二接合装置cl2以及第三接合装置cl3的状态。另外,在图4的第一接合装置cl1以及第二接合装置cl2的栏中,“〇”表示对象的接合装置处于接合状态,
“×”
表示对象的接合装置处于分离状态。另外,在图4的第三接合装置cl3的栏中,“lo”表示第三接合装置cl3形成第一变速档(低速档)st1,“hi”表示第三接合装置cl3形成第二变速档(高速档)st2,“n”表示第三接合装置cl3处于空档状态。
88.etc模式是经由分配用差动齿轮机构sp将第一驱动力源d1的驱动力和内燃机eg的驱动力合在一起从第二旋转元件e2向第一输出部件o1输出的模式。该模式由于能够将内燃机eg的扭矩放大后传递给第一输出部件o1,因此被称为所谓的电气式变矩器模式。
89.如图4所示,在etc模式下,第一接合装置cl1被控制为处于接合状态,第二接合装置cl2被控制为处于分离状态,并且第三接合装置cl3被控制为处于形成第一变速档(低速档)st1的状态。即,在etc模式下,第一接合装置cl1处于接合状态,第二接合装置cl2处于分离状态,第三接合装置cl3处于接合状态。etc模式相当于“第四模式”。
90.在本实施方式的etc模式下,分配用差动齿轮机构sp将第一旋转电机mg1的扭矩和内燃机eg的扭矩合在一起,从第一行星齿轮架c1输出比内燃机eg的扭矩大的扭矩。并且,第一行星齿轮架c1的旋转在变速器tm中以与第一变速档st1对应的变速比被变速并传递至变速输出齿轮3(参照图5)。
91.在第一ev模式下,第一接合装置cl1被控制为处于分离状态,第二接合装置cl2被控制为处于接合状态,第三接合装置cl3被控制为处于形成第一变速档(低速档)st1的状态。另一方面,在第二ev模式下,第一接合装置cl1被控制为处于分离状态,第二接合装置cl2被控制为处于接合状态,第三接合装置cl3被控制为处于形成第二变速档(高速档)st2的状态。即,在第一ev模式以及第二ev模式下,第一接合装置cl1处于分离状态,第二接合装置cl2以及第三接合装置cl3分别处于接合状态。因此,在第一ev模式以及第二ev模式下处于以下状态:内燃机eg与第一车轮w1之间的动力传递被切断,并且第一驱动力源d1与第一车轮w1之间进行动力传递。第一ev模式以及第二ev模式相当于“第一模式”。
92.在第一ev模式以及第二ev模式下,通过使第一接合装置cl1处于分离状态而使内燃机eg与分配用差动齿轮机构sp分离,并且通过使第二接合装置cl2处于接合状态而使分配用差动齿轮机构sp的三个旋转元件es1~es3处于相互一体地旋转的状态。其结果是,在本实施方式中,从第一齿轮g1传递至第二齿轮g2的第一旋转电机mg1的旋转直接传递至变速器tm的第三齿轮g3以及第四齿轮g4。并且,传递至变速器tm的旋转根据第三接合装置cl3
的状态,在第一ev模式下以第一变速档st1的变速比、在第二ev模式下以第二变速档st2的变速比进行变速后传递至变速输出齿轮3(参照图6)。
93.在第一hv模式下,第一接合装置cl1被控制为处于接合状态,第二接合装置cl2被控制为处于接合状态,第三接合装置cl3被控制为处于形成第一变速档(低速档)st1的状态。另一方面,在第二hv模式下,第一接合装置cl1被控制为处于接合状态,第二接合装置cl2被控制为处于接合状态,第三接合装置cl3被控制为处于形成第二变速档(高速档)st2的状态。即,在第一hv模式以及第二hv模式下,第一接合装置cl1、第二接合装置cl2以及第三接合装置cl3分别处于接合状态。因此,在第一hv模式以及第二hv模式下,处于内燃机eg以及第一驱动力源d1双方与第一车轮w1之间进行动力传递的状态。第一hv模式以及第二hv模式相当于“第三模式”。
94.在第一hv模式以及第二hv模式下,通过使第一接合装置cl1处于接合状态而使内燃机eg与分配用差动齿轮机构sp连接,并且通过使第二接合装置cl2处于接合状态而使分配用差动齿轮机构sp的三个旋转元件es1~es3处于相互一体地旋转的状态。其结果是,在本实施方式中,经由输入部件i传递的内燃机eg的旋转以及从第一齿轮g1传递至第二齿轮g2的第一旋转电机mg1的旋转直接传递至变速器tm的第三齿轮g3以及第四齿轮g4。并且,传递至变速器tm的旋转根据第三接合装置cl3的状态,在第一hv模式下以第一变速档st1的变速比、在第二hv模式下以第二变速档st2的变速比进行变速后传递至变速输出齿轮3(参照图6)。
95.在充电模式下,第一接合装置cl1被控制为处于接合状态,第二接合装置cl2被控制为处于接合状态,第三接合装置cl3被控制为处于空档状态。即,在充电模式下,第一接合装置cl1以及第二接合装置cl2分别处于接合状态,第三接合装置cl3处于分离状态。因此,在充电模式下处于以下状态:在内燃机eg与第一驱动力源d1之间进行动力传递,并且内燃机eg以及第一驱动力源d1双方与第一车轮w1之间的动力传递被切断,通过从内燃机eg传递的驱动力,第一驱动力源d1进行发电。充电模式相当于“第二模式”。
96.另外,在充电模式下,既可以使车辆停车,也可以通过第一旋转电机mg1发电产生的电力或蓄积于蓄电装置bt的电力使第二旋转电机mg2动力运行,将该第二旋转电机mg2的驱动力传递至第二车轮w2而使车辆行驶。这样设为充电模式并通过第二旋转电机mg2的驱动力使车辆行驶的模式被称为所谓的串联混合动力模式。
97.图5表示本实施方式的etc模式下的分配用差动齿轮机构sp以及变速器tm的速度线图。在图5的速度线图中,纵轴对应于分配用差动齿轮机构sp以及变速器tm的各旋转元件的旋转速度。并且,并列配置的多条纵线分别对应于分配用差动齿轮机构sp以及变速器tm的各旋转元件。另外,在图5的速度线图中,多条纵线的上方所示的附图标记是对应的旋转元件的附图标记。并且,多条纵线的下方所示的附图标记是与上方所示的附图标记所对应的旋转元件驱动连接的元件的附图标记。这样的速度线图的记载方法在图6等其他的速度线图中也是同样的。
98.如图5所示,在本实施方式的etc模式下,内燃机eg在正旋转的同时输出正扭矩,第一旋转电机mg1在负旋转的同时输出正扭矩而发电。因此,比内燃机eg的扭矩大的扭矩被传递至分配用差动齿轮机构sp的第一行星齿轮架c1。通过该扭矩而旋转的第一行星齿轮架c1的旋转被传递至变速器tm的第三齿轮g3。并且,在第三齿轮g3与第五齿轮g5之间以与第一
变速档st1相应的变速比减速后的旋转被传递至变速输出齿轮3。
99.图6表示本实施方式的第一ev模式和第二ev模式、以及第一hv模式和第二hv模式中的分配用差动齿轮机构sp以及变速器tm的速度线图。
100.如图6所示,在本实施方式的第一ev模式和第二ev模式、以及第一hv模式和第二hv模式下,通过使第二接合装置cl2处于接合状态,分配用差动齿轮机构sp的三个旋转元件es1~es3处于相互一体旋转的状态。就这样一体旋转的分配用差动齿轮机构sp的三个旋转元件es1~es3而言,在第一ev模式以及第二ev模式中传递第一旋转电机mg1的扭矩,在第一hv模式以及第二hv模式中传递内燃机eg以及第一旋转电机mg1双方的扭矩。通过这些扭矩而旋转的分配用差动齿轮机构sp的三个旋转元件es1~es3中,从作为第二分配用旋转元件es2的第一行星齿轮架c1输出的旋转被传递至变速器tm的第三齿轮g3。另一方面,从作为第三分配用旋转元件es3的第一齿圈r1输出的旋转被传递至变速器tm的第四齿轮g4。并且,在第一ev模式以及第一hv模式下,在第三齿轮g3与第五齿轮g5之间以与第一变速档st1对应的变速比减速后的旋转被传递至变速输出齿轮3。另一方面,在第二ev模式以及第二hv模式下,在第四齿轮g4与第六齿轮g6之间以与第二变速档st2对应的变速比减速后的旋转被传递至变速输出齿轮3。
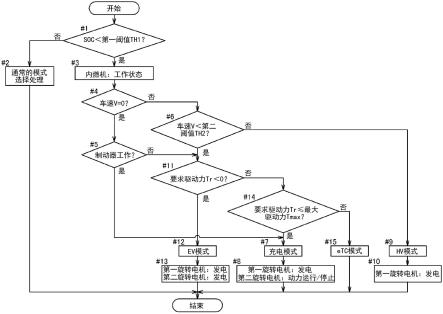
101.以下,对控制装置10的控制处理进行说明。图7是表示控制装置10的控制处理的一例的流程图。
102.如图7所示,控制装置10判断蓄电装置bt的充电量(soc)是否小于规定的第一阈值th1(步骤#1)。在本实施方式中,主控制部11基于从soc传感器se1输出的电压值或电流值等的信息,计算蓄电装置bt的充电量(soc),并判断该充电量是否小于第一阈值th1。在本实施方式中,充电量(soc)表示为蓄电装置bt在该时刻的充电量相对于满充电状态(100%)的比例(例如0~100%)。因此,第一阈值th1也被规定为相对于满充电状态(100%)的充电量的比例。例如,能够将充电量20%作为第一阈值th1。
103.在判断为蓄电装置bt的充电量(soc)不小于第一阈值th1,即蓄电装置bt的充电量(soc)为第一阈值th1以上的情况下(步骤#1:否),控制装置10进行通常的模式选择处理(步骤#2)。该通常的模式选择处理是蓄电装置bt的充电量(soc)比较多的情况下进行的处理,基于要求驱动力tr、车速v以及驾驶员的模式选择操作等,将第一驱动单元100a的工作模式切换为etc模式、第一ev模式、第二ev模式、第一hv模式、第二hv模式以及充电模式中的任意一个的处理。要求驱动力tr是车辆所要求的驱动力,更详细地说是要求向一对第一车轮w1以及一对第二车轮w2传递的驱动力,由主控制部11基于来自加速器操作量传感器se3以及制动器操作量传感器se4的信息而计算出。车速v是搭载有车辆用驱动装置100的车辆的行驶速度。另外,这样的选择处理是一般的,因此省略详细的说明。
104.另一方面,在判断为蓄电装置bt的充电量(soc)小于第一阈值th1的情况下(步骤#1:是),控制装置10使内燃机eg处于工作状态(步骤#3)。在本实施方式中,内燃机控制部12使内燃机eg处于工作状态。即,在内燃机eg处于停止状态的情况下起动内燃机eg,在内燃机eg已经处于工作状态的情况下维持该状态。
105.然后,控制装置10判断车速v是否为零,即判断是否处于车辆停车中(步骤#4)。在本实施方式中,主控制部11基于车速传感器se2的检测信号来计算出车速,并判断是否处于车辆停车中。另外,在此,车速v为零,即车辆停车中是指,不限于车速v严格地为零的情况,
优选也包括实质上为零的状态(接近零的状态)。例如,在车速v为
±
2km/小时以内的情况下,也优选包含在车速v为零的状态中。
106.在判断为车速v为零的情况下(步骤#4:是),控制装置10判断车辆的制动器是否正在工作(步骤#5)。在本实施方式中,主控制部11基于制动器操作量传感器se4的检测信号,计算驾驶员对制动踏板的操作量,判断车辆的制动器是否正在工作。另一方面,在判断为车速v不为零的情况下(步骤#4:否),控制装置10判断车速v是否小于规定的第二阈值th2(步骤#6)。
107.在本实施方式中,在为了设为第三模式而使第一接合装置cl1处于直接接合状态的情况下,第二阈值th2被设定为与内燃机eg的旋转速度为该内燃机eg能够自主旋转的旋转速度的下限值(例如怠速旋转速度)的车速v对应的车速。在本例中,作为第三模式有第一hv模式和第二hv模式,因此在设为即使在相同车速v下内燃机eg的旋转速度也变高的一个模式即第一hv模式的情况下,将与内燃机eg的旋转速度成为内燃机eg能够自主旋转的旋转速度的下限值的车速v对应的车速设为第二阈值th2。通过这样设定第二阈值th2,在车速v小于第二阈值th2的情况下不选择第一hv模式以及第二hv模,从而在车速为如果设为第一hv模式或者第二hv模式则内燃机eg为失速的车速v的情况下,能够不选择这些模式。
108.在判断为车辆的制动器正在工作的情况下(步骤#5:是),由于驱动第一车轮w1的必要性低,因此控制装置10将第一驱动单元100a的工作模式切换为充电模式(步骤#7)。在本实施方式中,接合控制部15使第一接合装置cl1以及第二接合装置cl2分别处于接合状态,并且使第三接合装置cl3处于空档状态。
109.此外,控制装置10以使第一旋转电机mg1进行发电并且使第二旋转电机mg2动力运行或停止的方式进行控制(步骤#8)。在本实施方式中,第一旋转电机控制部13以使第一旋转电机mg1进行发电的方式进行控制,并且第二旋转电机控制部14以使第二旋转电机mg2动力运行或者停止的方式进行控制。并且,控制装置10以通过第二驱动单元100b输出要求驱动力tr的方式进行控制。在本实施方式中,第二旋转电机控制部14以使第二驱动单元100b输出要求驱动力tr的方式控制第二旋转电机mg2。
110.在判断为车速v不小于第二阈值th2,即车速v为第二阈值th2以上的情况下(步骤#6:否),控制装置10将第一驱动单元100a的工作模式切换为第一hv模式或第二hv模式(步骤#9)。在本实施方式中,接合控制部15使第一接合装置cl1以及第二接合装置cl2分别处于接合状态,并且使第三接合装置cl3处于形成第一变速档st1或者第二变速档st2的状态。
111.此外,在第一hv模式或者第二hv模式下,控制装置10以使第一旋转电机mg1进行发电的方式进行控制(步骤#10)。在本实施方式中,第一旋转电机控制部13以使第一旋转电机mg1进行发电的方式进行控制。并且,控制装置10以使第一驱动单元100a和第二驱动单元100b一起输出要求驱动力tr的方式进行控制。另外,第二旋转电机mg2既可以以通过再生进行发电的方式进行控制,也可以以动力运行的方式进行控制。
112.在判断为车速v不为零(步骤#4:否)且小于第二阈值th2的情况下(步骤#6:是),或者在判断为车速v为零(步骤#4:是)且车辆的制动器未工作的情况下(步骤#5:否),控制装置10判断要求驱动力tr是否小于零(步骤#11)。
113.在判断为tr小于零的情况下(步骤#11:是),控制装置10将第一驱动单元100a的工作模式切换为第一ev模式或者第二ev模式(步骤#12)。在本实施方式中,接合控制部15使第
一接合装置cl1处于分离状态,使第二接合装置cl2处于接合状态,使第三接合装置cl3处于形成了第一变速档st1或者第二变速档st2的状态。另外,此时,虽然第一接合装置cl1处于分离状态,内燃机eg与第一车轮w1之间的动力传递处于被切断的状态,但在上述步骤#3中处于工作状态的内燃机eg不会停止,而是以维持工作状态的方式被控制。
114.另外,在该情况下,由于车辆处于减速中,因此控制装置10以使第一旋转电机mg1以及第二旋转电机mg2双方进行基于再生的发电的方式进行控制(步骤#13)。在本实施方式中,第一旋转电机控制部13以使第一旋转电机mg1进行基于再生的发电的方式进行控制,并且第二旋转电机控制部14以使第二旋转电机mg2进行基于再生的发电的方式进行控制。并且,控制装置10以通过第一驱动单元100a以及第二驱动单元100b双方输出要求驱动力tr的方式进行控制。因此,能够从第一车轮w1以及第二车轮w2双方回收车辆的惯性能量并进行高效地发电。
115.另一方面,在判断为要求驱动力tr不小于零,即要求驱动力tr为零以上的情况下(步骤#11:否),控制装置10判断要求驱动力tr是否大于第二驱动单元100b能够输出的最大驱动力tmax(步骤#14)。在判断为要求驱动力tr不大于最大驱动力tmax,即要求驱动力tr为最大驱动力tmax以下的情况下(步骤#14:是),控制装置10执行上述的步骤#7、#8。
116.另一方面,在判断为要求驱动力tr大于最大驱动力tmax的情况下(步骤#14:否),控制装置10将第一驱动单元100a的工作模式切换为etc模式(步骤#15)。在本实施方式中,接合控制部15使第一接合装置cl1处于接合状态,使第二接合装置cl2处于分离状态,使第三接合装置cl3处于形成了第一变速档st1的状态。此外,控制装置10以通过第一驱动单元100a以及第二驱动单元100b双方输出要求驱动力tr的方式进行控制。
117.图8以及图9是在蓄电装置bt的充电量(soc)小于第一阈值th1的情况下,通过驾驶员解除制动并使加速器工作,车辆从停车的状态起步的情况下的时序图。图8是表示现有的控制处理的一例的时序图,图9是表示本实施方式所涉及的控制装置10的控制处理的一例的时序图。另外,在现有的控制处理中,根据车速v切换为etc模式和第一hv模式或者第二hv模式中的任意一个。
118.在此,在图8以及图9中,“ns”、“nc”、“nr”分别表示换算成第一太阳齿轮s1的旋转速度的内燃机eg(输出轴eo)的旋转速度neg、换算成第一行星齿轮架c1的旋转速度的第一输出部件o1的旋转速度(车速v)、换算成第一齿圈r1的旋转速度的第一旋转电机mg1(第一转子ro1)的旋转速度nmg1。此外,“teg”、“tmg1”、“tmg2”分别表示内燃机eg的扭矩、第一旋转电机mg1的扭矩、第二旋转电机mg2的扭矩。另外,“br”、“ac”分别表示制动踏板的操作量、加速踏板的操作量。另外,关于这些附图标记,在下述的图10以及图11中也同样。
119.如图8所示,在现有的控制处理中,车辆在从停车状态起步且车速v比较低的状态下,第一驱动单元100a的工作模式为etc模式。在etc模式下,在时间范围t1内,第一旋转电机mg1的旋转速度nmg1为负,第一旋转电机mg1的扭矩tmg1为正。因此,在时间范围t1内,第一旋转电机mg1能够进行发电。然而,当车速v变大时,第一旋转电机mg1的旋转速度nmg1变为正。因此,在时间范围t2内,第一旋转电机mg1不能进行发电。这样,车辆在从停车状态起步的情况下,在etc模式下,第一旋转电机mg1进行发电的时间少,难以充分地确保蓄电装置bt的充电量(soc)。
120.与此相对,如图9所示,在由本实施方式所涉及的控制装置10进行的控制处理中,
车辆在从停车状态起步且车速v比较低的状态下,以要求驱动力tr为第二驱动单元100b能够输出的最大驱动力tmax以下为条件,第一驱动单元100a的工作模式为充电模式。在充电模式下,与车速v的大小无关,第一旋转电机mg1的旋转速度nmg1为正,第一旋转电机mg1的扭矩tmg1为负。因此,车辆在从停车状态起步的情况下,在车速v比较低的状态下,能够总是使第一旋转电机mg1进行发电,能够充分地确保蓄电装置bt的充电量(soc)。并且,车速v上升且旋转速度nc与旋转速度nr以及ns一致之后,通过转变至hv模式(在此为第一hv模式),能够使第一旋转电机mg1继续进行发电。
121.图10以及图11是在蓄电装置bt的充电量(soc)小于第一阈值th1的情况下,通过驾驶员使制动器工作,车辆从行驶状态停车的情况下的时序图。图10是表示现有的控制处理的一例的时序图,图11是表示由本实施方式所涉及的控制装置10进行的控制处理的一例的时序图。
122.如图10及图11所示,在现有的控制处理,以及由本实施方式所涉及的控制装置10进行的控制处理的任意一情况下,在车辆的减速中车速v比较高的状态下,第一驱动单元100a的工作模式为第一hv模式或者第二hv模式。在第一hv模式或者第二hv模式下,与车速v的大小无关,第一旋转电机mg1的旋转速度nmg1为正,第一旋转电机mg1的扭矩tmg1为负。因此,在车辆的减速中车速v比较高的状态下,能够始终使第一旋转电机mg1进行发电。因此,能够充分地确保蓄电装置bt的充电量(soc)。
123.然而,如图10所示,在现有的控制处理中,当车辆在减速中车速v处于比较低的状态下时,第一驱动单元100a的工作模式从第一hv模式或者第二hv模式变为etc模式。此时,与车辆从停车状态起步的情况相同,在etc模式下,在第一旋转电机mg1的旋转速度nmg1为正的状态下第一旋转电机mg1无法发电,因此第一旋转电机mg1进行发电的时间少,难以充分地确保蓄电装置bt的充电量(soc)。
124.与此相对,如图11所示,在由本实施方式所涉及的控制装置10进行的控制处理中,当车辆在减速中处于车速v比较低的状态下时,第一驱动单元100a的工作模式从第一hv模式或者第二hv模式变为第一ev模式或者第二ev模式。在第一ev模式或者第二ev模式下,第一旋转电机mg1以及第二旋转电机mg2双方进行基于再生的发电。因此,车辆的减速中,能够始终使第一旋转电机mg1进行发电。因此,能够充分地确保蓄电装置bt的充电量(soc)。
125.另外,在第一ev模式或者第二ev模式下,第一接合装置cl1处于分离状态,内燃机eg与第一车轮w1之间的动力传递处于被切断的状态,但在由本实施方式所涉及的控制装置10进行的控制处理中,内燃机eg被控制为不停止而维持工作状态。因此,在车辆的减速结束之后,也能够提前将第一驱动单元100a的工作模式转变到充电模式并继续蓄电装置bt的充电。因此,在车辆的减速中,能够在能迅速地进行减速结束后的模式转变的状态下,适当地对蓄电装置bt进行充电。
126.另外,在由本实施方式所涉及的控制装置10进行的控制处理中,在车辆的减速中,第一驱动单元100a的工作模式不从第一hv模式或者第二hv模式直接转变到充电模式,而是经由第一ev模式或者第二ev模式,在车辆的停车后转变到充电模式。在从第一hv模式或者第二hv模式直接转变到充电模式的情况下,当第三接合装置cl3从接合状态切换到分离状态时,内燃机eg以及第一旋转电机mg1双方与第一车轮w1之间的动力传递处于被切断的状态。因此,由于再生扭矩的变动有可能对车辆的行为产生影响。具体而言,当从在第一hv模
式或者第二hv模式下再生扭矩(负扭矩)被传递至第一车轮w1以及第二车轮w2双方的状态向与第一车轮w1驱动连接的第一驱动单元100a转变到充电模式时,由于再生扭矩不被传递到第一车轮w1而处于空转的状态,因此车辆的前后轮的扭矩的平衡发生变化。与此相对,在由本实施方式所涉及的控制装置10进行的控制处理中,当从第一hv模式或者第二hv模式转变到第一ev模式或者第二ev模式时,第一接合装置cl1从接合状态变为分离状态,但第一旋转电机mg1与第一车轮w1之间的动力传递不被切断。因此,能够避免再生扭矩的变动。另外,图11中的“过渡模式”是用于从第一ev模式或者第二ev模式过渡到充电模式的模式。在过渡模式下,为了使在第一ev模式或者第二ev模式中处于分离状态的第一接合装置cl1处于接合状态,利用第一旋转电机mg1的扭矩使第一齿圈r1的旋转速度nr上升,并接近第一太阳齿轮s1的旋转速度ns。
127.[其他实施方式]
[0128]
(1)在上述的实施方式中,以第一驱动单元100a具备etc模式、ev模式(第一ev模式以及第二ev模式)、hv模式(第一hv模式以及第二hv模式)以及充电模式作为工作模式的结构为例进行了说明。但是,并不限定于这样的结构。第一驱动单元100a至少具备ev模式和充电模式即可。因此,第一驱动单元100a也可以是不具备etc模式,或者不具备hv模式,或者不具备etc模式以及hv模式双方的结构。另外,在不具备etc模式的情况下,也可以不设置分配用差动齿轮机构sp。
[0129]
(2)在上述的实施方式中,以第一驱动单元100a具备基于变速器tm的变速比不同的第一ev模式和第二ev模式作为ev模式的结构为例进行了说明,但ev模式也可以是仅为一个变速比的一个模式。同样的,在上述的实施方式中,以第一驱动单元100a具备基于变速器tm的变速比不同的第一hv模式和第二hv模式作为hv模式的结构为例进行了说明,但hv模式也可以是仅为一个变速比的一个模式。在ev模式以及hv模式双方仅为一个模式的情况下,变速器tm(第三接合装置cl3)为实现一个变速档和空档状态(切断动力传递的状态)的结构。
[0130]
(3)在上述的实施方式中,以分配用差动齿轮机构sp为单小齿轮型的行星齿轮机构的情况为例进行了说明,但是并不限定于这样的结构。例如,分配用差动齿轮机构sp也可以由双小齿轮型的行星齿轮机构构成。或者,分配用差动齿轮机构sp也可以由组合了多个锥齿轮的结构等其他差动齿轮装置构成。
[0131]
(4)在上述的实施方式中,以第一接合装置cl1为摩擦接合装置、第二接合装置cl2以及第三接合装置cl3分别为啮合式接合装置的结构为例进行了说明。然而,并不限定于这样的结构,例如,第一接合装置cl1也可以是啮合式接合装置。另外,第二接合装置cl2以及第三接合装置cl3中的至少一方也可以是摩擦接合装置。
[0132]
(5)在上述的实施方式中,以第二驱动力源d2为第二旋转电机mg2的结构为例进行了说明,但并不限定于此。第二驱动力源d2也可以是内燃机等旋转电机以外的其他驱动力源。
[0133]
(6)另外,上述的各实施方式中,公开的结构只要不发生矛盾,也能够与其他实施方式中公开的结构组合应用。关于其他的结构,在本说明书中公开的实施方式在所有方面都只不过是简单的例示。因此,在不脱离本公开的主旨的范围内,能够适当地进行各种改变。
[0134]
[上述实施方式的概要]
[0135]
以下,对上述说明的车辆用驱动装置(100)的概要进行说明。
[0136]
车辆用驱动装置(100)是一种用于驱动车辆的前轮以及后轮的车辆用驱动装置(100),其中,
[0137]
将所述前轮以及所述后轮中的一方作为第一车轮(w1),将另一方作为第二车轮(w2),
[0138]
所述车辆用驱动装置具备:
[0139]
第一驱动单元(100a),其具备与所述车辆所具备的内燃机(eg)驱动连接的输入部件(i)以及第一驱动力源(d1),驱动所述第一车轮(w1);
[0140]
第二驱动单元(100b),其具备第二驱动力源(d2),驱动所述第二车轮(w2);以及
[0141]
控制装置(10),其控制所述第一驱动单元(100a)、所述第二驱动单元(100b)以及所述内燃机(eg),
[0142]
所述第一驱动力源(d1)为在与蓄电装置(bt)之间进行电力授受的旋转电机(mg1),
[0143]
所述第一驱动单元(100a)具备第一模式和第二模式作为工作模式,
[0144]
在所述第一模式下处于以下状态:在所述内燃机(eg)与所述第一车轮(w1)之间的动力传递被切断,并且在所述第一驱动力源(d1)与所述第一车轮(w1)之间进行动力传递,
[0145]
在所述第二模式下以下状态:在所述内燃机(eg)与所述第一驱动力源(d1)之间进行动力传递,并且在所述内燃机(eg)以及所述第一驱动力源(d1)双方与所述第一车轮(w1)之间的动力传递被切断,所述第一驱动力源(d1)通过从所述内燃机(eg)传递的驱动力进行发电,
[0146]
在所述蓄电装置(bt)的充电量小于规定的第一阈值(th1)且所述车辆的速度(v)小于规定的第二阈值(th2)的情况下,
[0147]
在所述车辆的速度(v)为零以上且所述车辆所要求的驱动力即要求驱动力(tr)为零以上的情况下,所述控制装置(10)以将所述第一驱动单元(100a)的所述工作模式设为所述第二模式,通过所述第二驱动单元(100b)输出所述要求驱动力(tr)的方式进行控制,
[0148]
在所述车辆的速度(v)大于零且所述要求驱动力(tr)小于零的情况下,所述控制装置(10)以将所述第一驱动单元(100a)的所述工作模式设为所述第一模式,使所述第一驱动力源(d1)进行基于再生的发电,并且使所述内燃机(eg)处于工作状态,通过所述第一驱动单元(100a)以及所述第二驱动单元(100b)双方输出所述要求驱动力(tr)的方式进行控制。
[0149]
根据该结构,控制装置(10)在蓄电装置(bt)的充电量小于第一阈值(th1)且车辆的速度(v)小于第二阈值(th2)的情况下,在车辆要继续停车的情况下、车辆要加速的情况下、或者车辆要以一定的速度行驶的情况下,以将第一驱动单元(100a)的工作模式设为第二模式,通过第二驱动单元(100b)输出要求驱动力(tr)的方式进行控制。在第二模式下,处于第一驱动力源(d1)通过从内燃机(eg)传递的驱动力进行发电的状态。因此,能够在由第二驱动单元(100b)确保必要的驱动力的同时,利用内燃机(eg)的驱动力通过第一驱动力源(d1)进行发电。因此,能够在车辆停车中、加速中、以及以一定的速度行驶中,适当地进行蓄电装置(bt)的充电。
[0150]
另外,控制装置(10),在蓄电装置(bt)的充电量小于第一阈值(th1)且车辆的速度(v)小于第二阈值(th2)的情况下,在车辆要减速的情况下,以将第一驱动单元(100a)的工作模式设为第一模式,使第一驱动力源(d1)进行基于再生的发电,并且使内燃机(eg)处于工作状态,通过第一驱动单元(100a)以及第二驱动单元(100b)双方输出要求驱动力(tr)的方式进行控制。因此,能够利用车辆的惯性力通过第一驱动力源(d1)进行发电。另外,此时由于不使内燃机(eg)停止而处于工作状态,所以在车辆的减速结束后,也能够提前将第一驱动单元(100a)的工作模式转变到第二模式并继续蓄电装置(bt)的充电。因此,在车辆的减速中,能够在能迅速进行减速结束后的模式转变的状态下,适当地进行蓄电装置(bt)的充电。
[0151]
如上所述,根据本结构,在车辆的停车中、以及以比较低的速度行驶的车辆以一定速度的行驶中、加速中以及减速中,分别能够适当地进行蓄电装置(bt)的充电。因此,能够充分地确保蓄电装置(bt)的充电量。
[0152]
在此,优选所述第一驱动单元(100a)还具备第三模式作为所述工作模式,
[0153]
在所述第三模式下处于以下状态:在所述内燃机(eg)以及所述第一驱动力源(d1)双方与所述第一车轮(w1)之间进行动力传递,
[0154]
在所述蓄电装置(bt)的充电量小于所述第一阈值(th1)且所述车辆的速度(v)为所述第二阈值(th2)以上的情况下,所述控制装置(10)以将所述第一驱动单元(100a)的所述工作模式设为所述第三模式,使所述第一驱动力源(d1)进行基于再生的发电,并且使所述第一驱动单元(100a)和所述第二驱动单元(100b)一起输出所述要求驱动力(tr)的方式进行控制。
[0155]
根据该结构,在蓄电装置(bt)的充电量小于所述第一阈值(th1)且所述车辆的速度(v)为所述第二阈值(th2)以上的情况下,能够通过第一驱动单元(100a)以及第二驱动单元(100b)双方的驱动力使车辆行驶的同时,利用内燃机(eg)的驱动力通过第一驱动力源(d1)进行发电,进行蓄电装置(bt)的充电。即,在车辆以比较高的速度行驶的情况下,能够在充分地确保必要的驱动力的同时进行蓄电装置(bt)的充电。因此,能够更充分地确保蓄电装置(bt)的充电量。
[0156]
优选在所述第一驱动单元(100a)还具备所述第三模式作为所述工作模式的结构中,所述第一驱动单元(100a)还具备:
[0157]
输出部件(o1),其与所述第一车轮(w1)驱动连接;以及
[0158]
分配用差动齿轮机构(sp),其按照旋转速度的顺序具备第一旋转元件(e1)、第二旋转元件(e2)以及第三旋转元件(e3),
[0159]
所述第一旋转元件(e1)与所述输入部件(i)驱动连接,
[0160]
所述第二旋转元件(e2)与所述输出部件(o1)驱动连接,
[0161]
所述第三旋转元件(e3)与所述第一驱动力源(d1)驱动连接,
[0162]
所述第一驱动单元(100a)还具备第四模式作为所述工作模式,在所述第四模式下,经由所述分配用差动齿轮机构(sp)使所述第一驱动力源(d1)的驱动力和所述内燃机(eg)的驱动力一起从所述第二旋转元件(e2)向所述输出部件(o1)输出,
[0163]
在所述蓄电装置(bt)的充电量小于所述第一阈值(th1)且所述车辆的速度(v)小于所述第二阈值(th2)的情况下,
[0164]
在所述车辆的速度(v)为零以上且所述要求驱动力(tr)大于所述第二驱动单元(100b)能够输出的最大驱动力的情况下,所述控制装置(10)以将所述第一驱动单元(100a)的所述工作模式设为所述第四模式来代替所述第二模式,通过所述第一驱动单元(100a)以及所述第二驱动单元(100b)双方输出所述要求驱动力(tr)的方式进行控制。
[0165]
根据该结构,控制装置(10)在蓄电装置(bt)的充电量小于第一阈值(th1)且车辆的速度(v)小于第二阈值(th2)的情况下,在要求驱动力(tr)为仅通过第二驱动单元(100b)不能输出的大小的情况下,以将第一驱动单元(100a)的工作模式设为第四模式来代替第二模式,通过第一驱动单元(100a)以及第二驱动单元(100b)双方输出要求驱动力(tr)的方式进行控制。因此,即使在要求驱动力(tr)大的情况下,也能够通过第一驱动单元(100a)以及第二驱动单元(100b)双方确保必要的驱动力。另外,通过在车辆的速度(v)小于第二阈值(th2)的比较低速的状态下设为第四模式,容易处于第一驱动力源(d1)进行发电的状态。因此,能够确保蓄电装置(bt)的充电量,或者能够将电力的消耗抑制得较小。
[0166]
优选在所述第一驱动单元(100a)还具备所述输出部件(o1)和所述分配用差动齿轮机构(sp)的结构中,
[0167]
所述第一驱动单元(100a)还具备:
[0168]
第一接合装置(cl1),其对所述输入部件(i)与所述第一旋转元件(e1)之间的动力传递进行断开/连接;
[0169]
第二接合装置(cl2),其对从所述第一旋转元件(e1)、所述第二旋转元件(e2)以及所述第三旋转元件(e3)这三个旋转元件中选择的两个旋转元件之间的动力传递进行断开/连接;以及
[0170]
第三接合装置(cl3),其对所述第二旋转元件(e2)与所述输出部件(o1)之间的动力传递进行断开/连接,
[0171]
在所述第一模式下,所述第一接合装置(cl1)处于分离状态,所述第二接合装置(cl2)以及所述第三接合装置(cl3)分别处于接合状态,
[0172]
在所述第二模式下,所述第一接合装置(cl1)以及所述第二接合装置(cl2)分别处于接合状态,所述第三接合装置(cl3)处于分离状态,
[0173]
在所述第三模式下,所述第一接合装置(cl1)、所述第二接合装置(cl2)以及所述第三接合装置(cl3)分别处于接合状态,
[0174]
在所述第四模式下,所述第一接合装置(cl1)处于接合状态,所述第二接合装置(cl2)处于分离状态,所述第三接合装置(cl3)处于接合状态。
[0175]
根据该结构,能够根据第一接合装置(cl1)、第二接合装置(cl2)以及第三接合装置(cl3)各自的接合状态,使第一驱动单元(100a)的工作模式适当地变化为第一模式、第二模式、第三模式以及第四模式中的任意一模式。
[0176]
另外,优选的是,所述第二驱动力源(d2)为在与所述蓄电装置(bt)之间进行电力授受的第二旋转电机(mg2)。
[0177]
根据该结构,在蓄电装置(bt)的充电量小于第一阈值(th1)且车辆的速度(v)小于第二阈值(th2)的情况下,在车辆的速度(v)大于零且要求驱动力(tr)小于零的情况下,即在车辆要减速的情况下,除了第一驱动力源(d1)以外,还能够使第二驱动力源(d2)进行基于再生的发电。因此,能够更充分地确保蓄电装置(bt)的充电量。
[0178]
工业实用性
[0179]
本公开所涉及的技术能够利用于用于驱动车轮的车辆用驱动装置。
[0180]
附图标记说明
[0181]
100:车辆用驱动装置
[0182]
100a:第一驱动单元
[0183]
100b:第二驱动单元
[0184]
10:控制装置
[0185]
d1:第一驱动力源
[0186]
d2:第二驱动力源
[0187]
mg1:第一旋转电机
[0188]
cl1:第一接合装置
[0189]
cl2:第二接合装置
[0190]
cl3:第三接合装置
[0191]
i:输入部件
[0192]
eg:内燃机
[0193]
bt:蓄电装置
[0194]
w1:第一车轮
[0195]
w2:第二车轮
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。