1.本发明涉及输送装置领域,具体的说是指一种菌棒智能输送装置。
背景技术:
2.菌棒是用棉籽壳或者木屑、玉米芯等农副产品下脚料经过合理配比,接种上菌种,培养出来的菌丝体经过生理生长达到成熟后,遇到适宜的温度、湿度就会长成菌体来。现有的菌棒在上面会打有用于接种菌种的多个接种孔,每个接种孔处贴有封孔标签,当前,菌棒生产商在对菌棒运输时要求封孔标签朝上,而现有技术只能依靠人工逐根将菌棒翻转至封孔标签朝上,然后再将翻转后的菌棒放置输送带上送去进行人工堆叠,然而采用人工翻转的方式需要花费大量的人力,而且效率较低。为了能够实现菌棒在输送过程中菌棒上的封孔标签能够朝上进行输送,本技术人经过潜心研究,遂有本案的产生。
技术实现要素:
3.本发明提供的是一种菌棒智能输送装置,其主要目的在于克服现有的菌棒在输送过程无法实现封孔标签自动朝上的问题。
4.为了解决上述的技术问题,本发明采用如下的技术方案:一种菌棒智能输送装置,包括机架、第一输送机构、翻转机构和第二输送机构,所述第一输送机构、翻转机构和第二输送机构连接于机架上,所述翻转机构位于第一输送机构和第二输送机构之间,所述翻转机构在圆周方向上设有可以开合的四个第一夹紧机构,所述四个第一夹紧机构上下左右布置,所述机架上设有用于带动翻转机构360
°
转动的第一传动机构,所述机架上设有可以转动且开合的前夹棒机构和后夹棒机构,所述前夹棒机构和后夹棒机构均可以进行伸缩,所述机架上设有安装杆,所述安装杆的顶面设有前后布置的多个感应器,所述感应器用于感应菌棒位于翻转机构最高处时菌棒侧面的封孔标签,所述第一输送机构位于翻转机构的下方,所述翻转机构转动至菌棒上的封孔标签朝上时菌棒与第二输送机构相接触。
5.进一步的,所述翻转机构包括前圆侧板、后圆侧板以及穿过前圆侧板和后圆侧板的第一转动轴,所述第一转动轴与第一传动机构传动连接,所述前圆侧板和后圆侧板之间设有四个第一安装板,所述四个第一安装板呈上下左右布置,每个第一安装板朝外的侧面设有所述第一夹紧机构,所述前圆侧板的外周和后圆侧板的外周均设有四个开口,相邻的两个开口间隔90
°
。
6.更进一步的,所述第一夹紧机构包括开合气缸和两个夹板,所述开合气缸与第一安装板连接,所述开合气缸具有两个开合部,所述两个开合部分别位于开合气缸的两端,每个夹板对应一个开合部且相互连接,所述开口的宽度大于两个夹板张开后的宽度。
7.更进一步的,所述机架上设有前后布置的两个第一轴承座,所述第一转动轴的两端分别穿过两个第一轴承座,所述第一传动机构包括第一电机、第一皮带轮、第二皮带轮和第一皮带,所述第一电机与机架连接,所述第一皮带轮设于第一电机的输出轴上,所述第二
皮带轮设于第一转动轴上,所述第一皮带连接于第一皮带轮和第二皮带轮之间。
8.进一步的,所述机架上设有两个安装座,所述前夹棒机构和后夹棒机构各对应一个安装座,所述前夹棒机构和后夹棒机构均包括朝向翻转机构依次布置的转动盘、第一连接盘和第二连接盘,所述转动盘和第一连接盘之间设有多根第一连接杆,所述第一连接盘背向翻转机构的侧面设有第一气缸,该第一气缸的活塞杆穿过第一连接盘与第二连接盘连接,所述第一连接盘的外周设有间隔布置的多个第一连接部,所述第二连接盘的外周设有间隔布置的多个第二连接部,每个第一连接部上设有与其铰接的第一铰接件,每个第二连接部上设有与其铰接的第二铰接件,所述第一铰接件的一端和第二铰接件的一端铰接,所述第二铰接件朝向翻转机构的侧面设有连接件,所述连接件上设有朝向翻转机构的夹棒,所述安装座上设有带动转动盘、第一连接盘和第二连接盘转动的第二传动机构。
9.更进一步的,所述第二传动机构包括第二电机、第三皮带轮、第四皮带轮、第二皮带和第二轴承座,所述第二电机和第二轴承座连接于安装座朝向翻转机构的侧面,所述第三皮带轮和第四皮带轮位于安装座背向翻转机构的一侧,所述转动盘背向翻转机构的侧面设有连接轴,所述连接轴穿过第二轴承座和安装座,所述第三皮带轮与第二电机的输出轴连接,所述第四皮带轮与连接轴连接,所述第二皮带连接于第三皮带轮和第四皮带轮之间。
10.进一步的,所述第一输送机构包括与机架连接的第一支撑架,所述第一支撑架的左端设有第一皮带辊,所述第一支撑架的右端设有为翻转机构提供翻转空间的第一活动口,所述第一活动口内设有第二皮带辊,所述第一支撑架的右端设有两个前后布置的第三皮带辊,所述第一皮带辊和第二皮带辊之间设有第一输送带,所述第一皮带辊和第三皮带辊之间设有第二输送带,所述第一支撑架的一侧面设有第二安装板,所述第二安装板上设有第三电机,所述第三电机的输出轴穿过第二安装板且连接有第五皮带轮,所述第一皮带辊的一端设有第六皮带轮,所述第五皮带轮和第六皮带轮之间设有第三皮带。
11.进一步的,所述第二输送机构包括与机架连接的第二支撑架,所述第二支撑架的右端设有第二转动轴,所述第二转动轴上设有三个间隔布置的第七皮带轮,所述第二支撑架的左端设有为翻转机构提供翻转空间的第二活动口,所述第二支撑架的左端设有三个间隔布置的第八皮带轮,其中排列中间的第八皮带轮位于第二活动口内,每个第七皮带轮对应一个第八皮带轮,对应的第七皮带轮和第八皮带轮之间设有第三输送带,所述第二支撑架的一侧面设有第三安装板,所述第三安装板上设有第四电机,所述第四电机的输出轴穿过第三安装板且连接有第九皮带轮,所述第二转动轴的一端设有第十皮带轮,所述第九皮带轮和第十皮带轮之间设有第四皮带。
12.进一步的,所述第二输送机构的上方设有安装架,所述安装架的上方设有与机架连接的连接板,所述安装架和连接板之间通过多根左右布置的第二连接杆连接,所述安装架的左、右端分别设有第二夹紧机构和第三夹紧机构,所述第二夹紧机构和第三夹紧机构可以升降和左右移动的设置。
13.更进一步的,所述第二夹紧机构和第三夹紧机构均包括第二气缸、第三气缸和压紧板,所述第二气缸横向的连接于安装架的后侧面,所述安装架的后侧面设有滑轨,所述滑轨上设有与其滑动配合的滑块,所述滑块的后侧面连接有第四安装板,所述第三气缸竖向的连接于第四安装板的后侧面,所述第三气缸的活塞杆朝下,所述压紧板的顶部与第三气缸的活塞杆连接。
14.由上述对本发明的描述可知,和现有技术相比,本发明具有如下优点:所述第一输送机构将菌棒送至翻转机构的下方,位于在下的第一夹紧机构将第一输送机构上的菌棒夹紧,然后翻转机构翻转90
°
,下一个位于在下的第一夹紧机构继续将第一输送机构上的菌棒夹紧,翻转机构再翻转90
°
,依次类推重复上述的动作即可将第一输送机构上的菌棒逐个夹紧,当菌棒随着翻转机构翻转至最上方时,感应器感应菌棒的左侧面可以感应到封孔标签,当感应器没有到封孔标签时,所述前夹棒机构和后夹棒机构伸长,然后位于在上的第一夹紧机构松开,前夹棒机构和后夹棒机构将菌棒的前后端夹紧并进行转动,直至感应器感应到菌棒的左侧面的封孔标签,此时位于在上的第一夹紧机构再将菌棒夹紧,而后前夹棒机构和后夹棒机构再松开并回收,最后翻转机构再翻转90
°
,位于在右的第一夹紧机构上的菌棒的封孔标签即朝上,位于在右的第一夹紧机构再松开让菌棒放置于第二输送机构上进行输送。重复上述的动作即可实现菌棒在输送时封孔标签朝上,无需人工进行翻转,节省了大量的人力。
附图说明
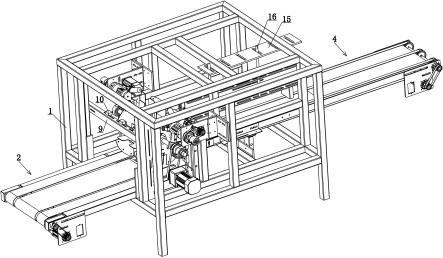
15.图1为本发明的结构图。
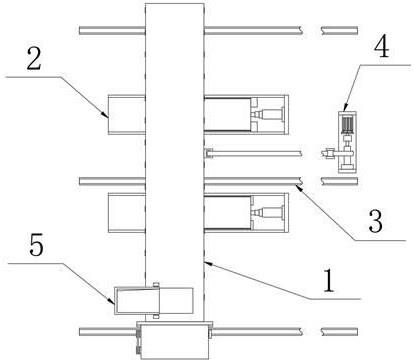
16.图2为本发明去掉机架后的结构图。
17.图3为本发明第一输送机构的结构图。
18.图4为本发明翻转机构、前夹棒机构和后夹棒机构的结构图。
19.图5为本发明翻转机构结构图。
20.图6为本发明第一夹紧机构的结构图。
21.图7为本发明前夹棒机构和后夹棒机构的结构图。
22.图8为图6在另一角度的结构图。
23.图9为本发明第一输送机构的结构图。
24.图10为本发明安装架、第二夹紧机构和第三夹紧机构的结构图。
25.图11为菌棒的结构图。
具体实施方式
26.参照图1、图2和图11,一种菌棒智能输送装置,包括机架1、第一输送机构2、翻转机构3和第二输送机构4,所述第一输送机构2、翻转机构3和第二输送机构4连接于机架1上,所述翻转机构3位于第一输送机构2和第二输送机构4之间。所述翻转机构3在圆周方向上设有可以开合的四个第一夹紧机构5,所述四个第一夹紧机构5上下左右布置,所述机架1上设有用于带动翻转机构3进行360
°
转动的第一传动机构6。所述机架1上设有可以转动且开合的前夹棒机构7和后夹棒机构8,所述前夹棒机构7和后夹棒机构8均可以进行伸缩。所述机架1上设有安装杆9,所述安装杆9的顶面设有前后布置的多个感应器10,所述感应器10用于感应菌棒位于翻转机构3最高处时菌棒侧面的封孔标签19。所述第一输送机构2位于翻转机构3的下方,所述翻转机构3转动至菌棒上的封孔标签19朝上时菌棒与第二输送机构4相接触。
27.参照图2、图4和图5,所述翻转机构3包括前圆侧板31、后圆侧板32以及穿过前圆侧板31和后圆侧板32的第一转动轴33,所述第一转动轴33与第一传动机构6传动连接,所述前圆侧板31和后圆侧板32之间设有四个第一安装板34,所述四个第一安装板34呈上下左右布
置,每个第一安装板34朝外的侧面设有所述第一夹紧机构5,所述前圆侧板31的外周和后圆侧板32的外周均设有四个开口35,相邻的两个开口间隔90
°
。
28.参照图2、图4、图5和图6,所述第一夹紧机构5包括开合气缸51和两个夹板52,所述开合气缸51与第一安装板34连接,所述开合气缸51具有两个开合部53,所述两个开合部53分别位于开合气缸51的两端,每个夹板52对应一个开合部53且相互连接,所述开口35的宽度大于两个夹板52张开后的宽度。
29.参照图2和图4,所述机架1上设有前后布置的两个第一轴承座11,所述第一转动轴33的两端分别穿过两个第一轴承座11。所述第一传动机构6包括第一电机61、第一皮带轮62、第二皮带轮63和第一皮带64,所述第一电机61与机架1连接,所述第一皮带轮62设于第一电机61的输出轴上,所述第二皮带轮63设于第一转动轴33上,所述第一皮带64连接于第一皮带轮62和第二皮带轮63之间。
30.参照图2、图4、图5、图6和图11,所述开合气缸51用于带动两个夹板52的开合,当两个夹板52作闭合时可以将菌棒夹紧,当两个夹板52作张开时可以将菌棒松开,所述两个夹板52的长度小于菌棒的长度。所述第一电机61通过第一皮带轮62、第二皮带轮63和第一皮带64带动第一转动轴33转动,从而带动翻转机构3和第一夹紧机构5的转动。
31.参照图2、图4、图7和图8,所述机架1上设有两个安装座12,所述前夹棒机构7和后夹棒机构8各对应一个安装座12。所述前夹棒机构7和后夹棒机构8均包括朝向翻转机构3依次布置的转动盘71、第一连接盘72和第二连接盘73,所述转动盘71和第一连接盘72之间设有多根第一连接杆74,所述第一连接盘72背向翻转机构3的侧面设有第一气缸75,该第一气缸75的活塞杆穿过第一连接盘72与第二连接盘73连接。所述第一连接盘72的外周设有间隔布置的三个第一连接部721,所述第二连接盘73的外周设有间隔布置的三个第二连接部731,每个第一连接部721对应一个第二连接部731,每个第一连接部721上设有与其铰接的第一铰接件76,每个第二连接部731上设有与其铰接的第二铰接件77,所述第一铰接件76的一端和第二铰接件77的一端铰接,所述第二铰接件77朝向翻转机构3的侧面设有连接件78,所述连接件78上设有朝向翻转机构3的夹棒79,所述安装座12上设有带动转动盘71、第一连接盘72和第二连接盘73转动的第二传动机构13。
32.参照图7和图8,所述第二传动机构13包括第二电机131、第三皮带轮132、第四皮带轮133、第二皮带134和第二轴承座135。所述第二电机131和第二轴承座135连接于安装座12朝向翻转机构3的侧面,所述第三皮带轮132和第四皮带轮133位于安装座12背向翻转机构3的一侧。所述转动盘71背向翻转机构3的侧面设有连接轴70,所述连接轴70穿过第二轴承座135和安装座12,所述第三皮带轮132与第二电机131的输出轴连接,所述第四皮带轮133与连接轴70连接,所述第二皮带134连接于第三皮带轮132和第四皮带轮133之间。另外,在装座12背向翻转机构3的侧面可以设有张紧轮136,该张紧轮136位于第三皮带轮132和第四皮带轮133之间且相对错位,所述第二皮带134绕过张紧轮136。
33.参照图4、图7、图8和图11,所述第一气缸75用于带动三根夹棒79作收合或张开动作,当第一气缸75的活塞杆伸长时,第二连接盘73朝向翻转机构3移动,此时三根夹棒79作收合动作可将菌棒的端部夹紧;当第一气缸75的活塞杆回缩时,第二连接盘73背向翻转机构3移动,此时三根夹棒79作张开动作可将菌棒的端部松开。所述第二传动机构13通过第三皮带轮132、第四皮带轮133和第二皮带134带动转动盘71、第一连接盘72和第二连接盘73转
动,从而带动三根夹棒79的转动。
34.参照图1、图2和图3,所述第一输送机构2包括与机架1连接的第一支撑架21,所述第一支撑架21的左端设有第一皮带辊22,所述第一支撑架21的右端设有为翻转机构3提供翻转空间的第一活动口23,所述第一活动口23内设有第二皮带辊24,所述第一支撑架21的右端设有两个前后布置的第三皮带辊25,所述第一皮带辊22和第二皮带辊24之间设有第一输送带26,所述第一皮带辊22和第三皮带辊25之间设有第二输送带27。所述第一支撑架21的一侧面设有第二安装板28,所述第二安装板28上设有第三电机281,所述第三电机281的输出轴穿过第二安装板28且连接有第五皮带轮282,所述第一皮带辊22的一端设有第六皮带轮283,所述第五皮带轮282和第六皮带轮283之间设有第三皮带29。
35.参照图1、图2、图3和图11,所述第三电机281通过第五皮带轮282、第六皮带轮283和第三皮带29带动第一皮带辊22转动,从而驱动第一输送带26和第二输送带27的运行,菌棒放置于第一输送带26和第二输送带27进行输送,当菌棒输送至第一活动口23时,位于在下的第一夹紧机构5将菌棒夹紧。
36.参照图1、图2和图9,所述第二输送机构4包括与机架1连接的第二支撑架41,所述第二支撑架41的右端设有第二转动轴42,所述第二转动轴42上设有三个间隔布置的第七皮带轮43,所述第二支撑架41的左端设有为翻转机构3提供翻转空间的第二活动口44,所述第二支撑架41的左端设有三个间隔布置的第八皮带轮45,其中排列中间的第八皮带轮45位于第二活动口44内,每个第七皮带轮43对应一个第八皮带轮45,对应的第七皮带轮43和第八皮带轮45之间设有第三输送带46。所述第二支撑架41的一侧面设有第三安装板47,所述第三安装板47上设有第四电机471,所述第四电机471的输出轴穿过第三安装板47且连接有第九皮带轮472,所述第二转动轴42的一端设有第十皮带轮473,所述第九皮带轮472和第十皮带轮473之间设有第四皮带48。
37.参照图1、图2、图9和图11,所述第四电机471通过第九皮带轮472、第十皮带轮473和第四皮带48带动第二转动轴42转动,从而驱动三条第三输送带46的运行,当翻转机构3带动菌棒转动至位于第二活动口44时,菌棒与三条第三输送带46接触,位于在右的第一夹紧机构5将菌棒松开,第三输送带46将菌棒继续输送。
38.参照图1、图2和图10,所述第二输送机构4的上方设有安装架14,所述安装架14的上方设有与机架1连接的连接板15,所述安装架14和连接板15之间通过多根左右布置的第二连接杆16连接,所述安装架14的左、右端分别设有第二夹紧机构17和第三夹紧机构18,所述第二夹紧机构17和第三夹紧机构18可以升降和左右移动的设置。
39.参照图2和图10,所述第二夹紧机构17和第三夹紧机构18均包括第二气缸171、第三气缸172和压紧板173,所述第二气缸171横向的连接于安装架14的后侧面,所述安装架14的后侧面设有滑轨174,所述滑轨174上设有与其滑动配合的滑块175。所述滑块175的后侧面连接有第四安装板176,所述第三气缸172竖向的连接于第四安装板176的后侧面,所述第三气缸172的活塞杆朝下,所述压紧板173的顶部与第三气缸172的活塞杆连接。
40.参照图2、图10和图11,所述第二气缸171用于带动压紧板173的左右移动,所述第三气缸172用于带动压紧板173的升降。当第三输送带46上的菌棒达到一定的数量时,所述第二夹紧机构17的压紧板173和第三夹紧机构18的压紧板173先下降,然后再在左右方向上作相向压紧动作,将第三输送带46上的多根菌棒进行压紧紧挨,减小菌棒之间的空隙,压紧
后所述第二夹紧机构17的压紧板173和第三夹紧机构18的压紧板173复位。
41.参照图1至图11,本发明的整体工作流程如下:所述第一输送机构2将菌棒送至翻转机构3的下方,位于在下的第一夹紧机构5将第一输送机构2上的菌棒夹紧,然后翻转机构3翻转90
°
,下一个位于在下的第一夹紧机构5继续将第一输送机构2上的菌棒夹紧,翻转机构再翻转90
°
,依次类推重复上述的动作即可将第一输送机构2上的菌棒逐个夹紧。当菌棒随着翻转机构3翻转至最上方时,感应器10(如红外感应器)感应菌棒的左侧面可以感应到封孔标签19,当感应器10没有到封孔标签19时,所述前夹棒机构7和后夹棒机构8伸长,然后位于在上的第一夹紧机构5松开,前夹棒机构7和后夹棒机构8将菌棒的前后端夹紧并进行转动,直至感应器10感应到菌棒的左侧面的封孔标签19,此时位于在上的第一夹紧机构5再将菌棒夹紧,而后前夹棒机构7和后夹棒机构8再松开并回收,最后翻转机构3再翻转90
°
,位于在右的第一夹紧机构5上的菌棒的封孔标签19即朝上,位于在右的第一夹紧机构5再松开让菌棒放置于第二输送机构4上进行输送。当第二输送机构4上的菌棒达到一定的数量时,所述第二夹紧机构17的压紧板173和第三夹紧机构18的压紧板173将第二输送机构4上的多根菌棒进行压紧紧挨,减小菌棒之间的空隙,然后第二输送机构4再将多根压紧后的菌棒送至下一道工序。上述提及的电机、气缸及感应器10均受控于一控制系统,该控制系统的控制方式对本领域的技术人员来说是容易实现的。
42.上述仅为本发明的具体实施方式,但本发明的设计构思并不局限于此,凡利用此构思对本发明进行非实质性的改动,均应属于侵犯本发明保护范围的行为。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。