竖向摆动;
16.两组履带式行走机构分别设置在机身的两侧,用于驱动煤矿井下智能随动装置纵向移动;
17.机身上设置有集控中心;
18.缓冲托辊架前端设置有距离传感器ⅰ19.机身的四个角上设置有距离传感器ⅱ;
20.s2,启动煤矿井下智能随动装置,随锚杆转载机向前移动,距离传感器ⅰ实时检测煤矿井下智能随动装置与前方锚杆转载机的距离,并将检测数据传递至集控中心,集控中心根据检测数据控制煤矿井下智能随动装置的行走速度,保证煤矿井下智能随动装置以预设间距随锚杆转载机前进;
21.煤矿井下智能随动装置前进过程中,距离传感器ⅱ实时检测煤矿井下智能随动装置与巷道两帮的距离,并将检测数据传递至集控中心,集控中心根据检测数据判断机身相对于煤矿井下智能随动装置之后的皮带是否发生偏转,若机身发生偏转,控制横向摆动机构调节自移机尾托辊架绕转动件ⅰ横向偏转,使自移机尾托辊架及其前方的受料部与煤矿井下智能随动装置之后的皮带保持在同一直线上。
22.进一步地,步骤s2中,横向摆动机构的调节量由安装在其内的行程传感器实时检测并将检测数据传递至集控中心。
23.进一步地,转动件ⅰ为竖向设置的铰接轴,转动件ⅱ为横向设置的销轴。
24.进一步地,横向摆动机构和竖向摆动机构ⅰ均采用油缸。
25.进一步地,受料斗内设置有压带板,压带板位于缓冲托辊组的两侧,用于压紧缓冲托辊组上的上皮带。
26.进一步地,缓冲托辊架上设置有皮带清扫器。
27.本发明还提供一种煤矿井下运输系统,采用上述煤矿井下智能随动方法随锚杆转载机纵向移动。
28.本发明具有以下有益效果:
29.1、采用履带行走驱动牵引掘进巷道带式输送机皮带跟随掘进设备自主延伸,实现输送机运行状态下的随掘延伸;
30.2、距离传感器ⅱ实时煤矿井下智能随动装置与巷道两帮的距离,集控中心根据检测数据进行实时纠偏,保证自移机尾托辊架101及其前方的受料部上的皮带与煤矿井下智能随动装置100之后的皮带保持在同一直线上,避免在运输过程出现撒料问题;
31.3、距离传感器ⅰ实时检测煤矿井下智能随动装置与前机距离,保证接料精准,避免在接料时出现撒料问题。
附图说明
32.为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
33.图1为煤矿井下智能随动装置的示意图;
34.图2为图1另一方向的示意图;
35.图3为煤矿井下运输系统的示意图;
36.图4为皮带架自动延伸装置在巷道中的工作状态图;
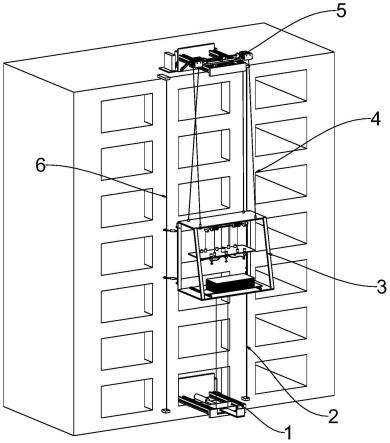
37.图5为皮带架组装完成后的示意图;
38.图6为皮带架中弹簧卡扣的示意图;
39.图7为皮带架组装组件的示意图;
40.图8为上组件运输平台的示意图;
41.图9为下组件运输平台的示意图;
42.图10为可伸缩机身的示意图。
43.图标:煤矿井下智能随动装置100,自移机尾托辊架101,机身102,履带式行走机构103,铰接轴104,横向摆动油缸105,缓冲托辊架106,改向滚筒107,缓冲托辊组108,受料斗109,集控中心110,距离传感器ⅰ111,距离传感器ⅱ112,皮带清扫器113,竖向摆动油缸ⅰ114;压带板115;
44.可伸缩机身200,机身单元201,伸缩导杆202,滑靴203,可伸缩机身中的槽型托辊204,可伸缩机身中的上皮带防跑偏压轮205,下托辊206,下皮带防跑偏立托辊207,缸体安装座208,杆体安装座209;
45.皮带架自动延伸装置300,h架连接纵梁301,托辊架302,上托辊303,h架304,下托辊305,纵梁插槽306,弹簧卡扣307,底座308,前端机架309,中部机架310,后端机架311,纵向伸缩油缸ⅰ312,固定平台313,伸缩滑台314,推移架315,横向伸缩油缸ⅰ316,纵向推移油缸317,压带滚筒318,导向杆319,纵向滑移座320,横向滑移座321,h架叉座322,纵向伸缩油缸ⅱ323,横向伸缩油缸ⅱ324,竖向摆动油缸ⅱ325,支撑轮326,皮带架自动延伸装置中的槽型托辊327,皮带架自动延伸装置中的上皮带防跑偏压轮328;皮带架329;卡孔330;
46.移变平台400;巷道500。
具体实施方式
47.下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
48.实施例1
49.本实施例提供一种煤矿井下智能随动方法,基于煤矿井下智能随动装置100实现。
50.煤矿井下智能随动装置100包括受料部、自移机尾托辊架101、机身102、履带式行走机构103;自移机尾托辊101架穿过机身102,后端的中心位置与机身102通过转动件ⅰ(本实施例中转动件ⅰ为铰接轴104)转动连接,前端的两侧通过两组横向摆动机构(本实施例中横向摆动机构采用横向摆动油缸105)与机身102连接,两组横向摆动机构用于使自移机尾托辊架101绕转动件ⅰ横向偏转,自移机尾托辊架101上转动安装有上托辊组和下托辊组。
51.受料部包括缓冲托辊架106、改向滚筒107、缓冲托辊组108和受料斗109;改向滚筒107转动安装在缓冲托辊架106的前端;缓冲托辊组108转动安装在缓冲托辊架106上,位于改向滚筒107之后;受料斗109固定在缓冲托辊架106上,位于缓冲托辊组108的上方;缓冲托辊架106的后端与自移机尾托辊架101的前端通过转动件ⅱ(本实施例中转动件ⅱ为横向设
置的销轴)和竖向摆动机构ⅰ(本实施例中竖向摆动机构采用竖向摆动油缸ⅰ114)连接,竖向摆动机构ⅰ位于转动件ⅱ的上方或下方,竖向摆动机构ⅰ用于使受料部绕转动件ⅱ竖向摆动;两组履带式行走机构103分别设置在机身102的两侧,用于驱动煤矿井下智能随动装置100纵向移动。
52.集控系统设置在机身102的集控中心110上;横向摆动机构中设置有行程传感器;缓冲托辊架106前端设置有距离传感器ⅰ111;机身102的四个角上设置有距离传感器ⅱ112。
53.缓冲托辊架106上设置有皮带清扫器113。
54.受料斗109内设置有压带板115,压带板115位于缓冲托辊组108的两侧,用于压紧缓冲托辊组108上的上皮带,防止物料从受料斗109和上皮带之间撒落。
55.受料部布置于机身102最前部与自移机尾托辊架101连接,能够通过竖向摆动油缸ⅰ114实现受料部的上下摆动,以满足配套使用时高度调整要求。自移机尾托辊架101通过横向摆动油缸105实现自移机尾托辊架101绕铰接轴104横向偏转,以满足配套使用时横向角度调整要求。缓冲托辊组108能够对输送机皮带进行有效缓冲支撑,减轻前方卸煤对皮带造成的破坏。大容积的受料斗109能够起到一定的煤流承载、缓冲作用,同时与锚杆转载机卸料端具备足够的搭接长度,避免漏撒煤。
56.上述煤矿井下智能随动方法如下所述:
57.煤矿井下智能随动装置100位于锚杆转载机后方,随锚杆转载机向前移动,距离传感器ⅰ111实时检测煤矿井下智能随动装置100与前方锚杆转载机的距离,并将检测数据传递至集控中心110,集控中心110根据检测数据控制煤矿井下智能随动装置100的行走速度,保证煤矿井下智能随动装置100以预设间距随锚杆转载机前进;
58.煤矿井下智能随动装置100前进过程中,距离传感器ⅱ112实时检测煤矿井下智能随动装置100与巷道两帮的距离,并将检测数据传递至集控中心110,集控中心110根据检测数据判断机身102相对于煤矿井下智能随动装置100之后的皮带是否发生偏转,若机身102发生偏转(比如煤矿井下智能随动装置100进行转向时),控制横向摆动油缸104调节自移机尾托辊架101绕铰接轴103横向偏转,使自移机尾托辊架101及其前方的受料部与煤矿井下智能随动装置100之后的皮带保持在同一直线上,横向摆动油缸104的伸缩量由安装在其内的行程传感器实时检测并将检测数据传递至集控中心110。
59.实施例2
60.本实施例提供一种煤矿井下运输系统,采用上述煤矿井下智能随动方法随锚杆转载机纵向移动。
61.煤矿井下运输系统还包括设置在煤矿井下智能随动装置100之后的皮带架自动延伸装置300;皮带架自动延伸装置300用于实现带式输送机自动延伸皮带。
62.皮带架自动延伸装置300包括皮带架上组件、皮带架下组件和皮带架组装组件。
63.皮带架上组件包括两根h架连接纵梁301、连接两根h架连接纵梁301的托辊架302以及安装在托辊架302上的上托辊303,上托辊采用槽型托辊;皮带架下组件包括h架304和下托辊305,h架304包括两根竖梁以及连接两根竖梁的横梁,竖梁的顶端设置有纵梁插槽306,下托辊304安装在横梁上;相邻两组皮带架上组件的h架连接纵梁301插设在同一组皮带架下组件的纵梁插槽306中实现连接。
64.本实施例中,h架连接纵梁301的端部为等腰梯形结构的导向端头,h架连接纵梁
301上设置有竖向孔,竖向孔内安装有弹簧卡扣307,弹簧卡扣307包括弹簧以及设置在弹簧两端的卡块,卡块的上部位于竖向孔外,纵梁插槽306上设置有卡孔330。h架连接纵梁301刚插入纵梁插槽306时,弹簧两端的卡块首先被纵梁插槽306的上下两侧壁压缩,使得h架连接纵梁301能够顺利插入纵梁插槽306,当弹簧卡扣307到达卡孔330位置时,卡块受弹簧弹力穿过卡孔330,实现h架连接纵梁301与纵梁插槽306连接位置的自锁。皮带架上组件、皮带架下组件组成皮带架329。
65.皮带架组装组件包括底座308、前端机架309、中部机架310、后端机架311、上组件运输平台、下组件运输平台;前端机架309、中部机架310、后端机架311由前到后依次固定安装在底座308上;底座308或前端机架309的前端设置有用于与前机连接的纵向伸缩机构ⅰ(本实施例中纵向伸缩机构ⅰ采用纵向伸缩油缸ⅰ312)。
66.前端机架309的高度由前到后逐渐增大,前端机架309上转动安装有上托辊组,前端机架309可布设液压系统或存储物料。
67.中部机架310与前端机架309的后端等高,中部机架310上安装有上组件运输平台和上托辊组,上托辊组位于上组件运输平台的上方。
68.上组件运输平台包括固定平台313、伸缩滑台314、横向伸缩机构ⅰ、纵向推移机构和推移架315;伸缩滑台314与固定平台313横向滑动连接,用于支撑皮带架上组件的两根h架连接纵梁301;横向伸缩机构ⅰ采用横向伸缩油缸ⅰ316,两端分别与固定平台313和伸缩滑台314连接,用于驱动伸缩滑台314横向伸缩;纵向推移机构采用纵向推移油缸317,纵向跨过伸缩滑台314,前端与推移架315连接,后端与固定平台313连接,用于驱动推移架315纵向平移将伸缩滑台314上的皮带架上组件向后推移。
69.进一步地,固定平台313的纵向侧设置有压带滚筒318,用于使下皮带从固定平台313的下方穿过,用于限制下皮带走向,防止皮带架组装时受皮带影响。
70.进一步地,上组件运输平台还包括导向杆319,导向杆319纵向跨过伸缩滑台314,两端分别与固定平台313连接,推移架315滑动设置在导向杆319上,用于限制推移架315走向,防止皮带架上组件纵向滑移时发生方向偏离。
71.下组件运输平台设置在中部机架310和后端机架311之间,包括纵向滑移座320、横向滑移座321、h架叉座322、纵向伸缩机构ⅱ、横向伸缩机构ⅱ、竖向摆动机构ⅱ;纵向滑移座320与底座308纵向滑动连接;纵向伸缩机构ⅱ采用纵向伸缩油缸ⅱ323,两端分别与底座308和纵向滑移座320连接,用于驱动纵向滑移座320纵向滑动;横向滑移座321与纵向滑移座320滑动连接;横向伸缩机构ⅱ采用横向伸缩油缸ⅱ324,两端分别与纵向滑移座320和横向滑移座321连接,用于驱动横向滑移座321横向滑动;h架叉座322上设置有两个用于与h架304的两根竖梁插接的插槽,h架叉座322与横向滑移座321通过转动件ⅳ(本实施例中转动件ⅳ采用销轴)转动连接;竖向摆动机构ⅱ采用竖向摆动油缸ⅱ325,两端分别与h架叉座322与横向滑移座321连接,用于驱动h架叉座322绕转动件ⅳ竖向摆动。
72.后端机架311的高度由前到后逐渐减小,前端与中部机架310等高,后端机架311上转动安装有上托辊组。后端机架311上设置有可横向伸缩的支撑轮326,用于支撑后端已装配完成而前端未装配完成的h架连接纵梁301。支撑轮326由横向设置的油缸驱动实现伸缩。
73.皮带架自动延伸装置300的上托辊组与可伸缩机身200的上托辊组相同,均包括多根槽型托辊327,槽型托辊327的两侧设置有上皮带防跑偏压轮328,用于限制上皮带走向。
皮带架自动延伸装置300可布置在巷道任何一侧,增加对巷道的适应性。
74.煤矿井下智能随动装置100前进过程中,带式输送机的上皮带位于前端机架309、中部机架310、后端机架311的槽型托辊327上,皮带架组装组件不停机补充皮带架,工作过程过程如下所述:
75.s1,横向伸缩油缸ⅱ324伸出将横向滑移座321横向推出,竖向摆动油缸ⅱ325伸出,使h架叉座322向下摆动处于倾斜位置,将h架304的两根竖梁插接在h架叉座322的插槽中,横向伸缩油缸ⅱ324收缩将横向滑移座321横向复位,竖向摆动油缸ⅱ325收缩,使h架叉座322向上摆正,下托辊304位于下皮带下方;
76.s2,横向伸缩油缸ⅰ316伸出将伸缩滑台314横向推出,将皮带架上组件放置在伸缩滑台314上;
77.若皮带架上组件是未组装状态,则在伸缩滑台314上进行组装,组装完成后,横向伸缩油缸ⅰ316收缩,使两根h架连接纵梁301分别对准h架304的两个纵梁插槽306;
78.若皮带架上组件是组装状态,则横向伸缩油缸ⅰ316直接收缩,使两根h架连接纵梁301分别对准h架304的两个纵梁插槽306;
79.s3,纵向推移机构将推移架315向后推进,将伸缩滑台314上的皮带架上组件向后推送至两根h架连接纵梁301的后端分别插入h架304的两个纵梁插槽306中,通过弹簧卡扣307与纵梁插槽306连接固定;
80.s4,皮带架组装组件随前机一同向前移动,组装完成的部分由带式输送机的机头牵引不随皮带架组装组件前移,直至后端已安装好的h架连接纵梁301的前端移动到h架叉座322之后;
81.s5,横向伸缩油缸ⅱ324伸出将横向滑移座321横向推出,竖向摆动油缸ⅱ325伸出,使h架叉座322向下摆动处于倾斜位置,将h架304的两根竖梁插接在h架叉座322的插槽中,横向伸缩油缸ⅱ324收缩将横向滑移座321横向复位,竖向摆动油缸ⅱ325收缩,使h架叉座322向上摆正,,下托辊304位于下皮带下方,纵向伸缩油缸ⅱ323收缩,带动h架304后移,使两个纵梁插槽306套设在两根h架连接纵梁301的前端,通过弹簧卡扣307与h架连接纵梁301的前端连接固定;
82.s6,重复步骤s2-s5,组装完成的部分由带式输送机的机头牵引逐渐脱离底座308,使上皮带落在上托辊303上。
83.实施例3
84.本实施例提供一种煤矿井下运输系统,在煤矿井下智能随动装置100和皮带架自动延伸装置300之间设置可伸缩机身200。
85.可伸缩机身200包括多个机身单元201以及多个伸缩导杆202;机身单元201上转动安装有上托辊组和下托辊组;相邻两组机身单元201通过伸缩导杆202连接,最前方的机身单元201与煤矿井下智能随动装置100的机身102通过伸缩导杆202连接,最后方的机身单元201与纵向伸缩机构ⅰ连接。
86.具体地,机身单元201包括两块相对设置的侧板以及连接两块侧板的隔板,侧板的底部设置有滑靴203,隔板上方转动安装有上托辊组和下托辊组,上托辊组包括多根槽型托辊204,槽型托辊204的两侧设置有上皮带防跑偏压轮205,两根下托辊206之间转动安装有下皮带防跑偏立托辊207。
87.具体地,侧板的外侧安装有缸体安装座208和杆体安装座209;每根伸缩导杆202的缸体通过转动件ⅲ转动安装在对应机身单元201的缸体安装座208上;相邻两组机身单元201中,后一机身单元上伸缩导杆202的杆体与前一缩皮带架的杆体安装座209通过转动件ⅲ转动连接;最前方机身单元上伸缩导杆202的杆体与煤矿井下智能随动装置100的机身102通过转动件ⅲ转动连接;转动件ⅲ横向设置,本实施中采用销轴。
88.在掘进作业中,煤矿井下智能随动装置100随前方设备向前移动,煤矿井下智能随动装置100之后的带式输送机则随着煤矿井下智能随动装置100的前进不断安装皮带架,以延长输送长度。当煤矿井下智能随动装置100前方掘锚一体机、锚杆转载机发生故障需要检修、更换部件时,由于设备之间搭接距离有限,设备检修空间狭小,检修作业困难,可伸缩机身200可以为煤矿井下智能随动装置100前方设备提供一定距离的退机空间,以提供充足的检修空间,煤矿井下智能随动装置100推动机身单元201依次后退,伸缩导杆202缩回,可伸缩机身200整体长度缩短而不会影响后方皮带架自动延伸装置300及带式输送机的正常运行。根据实际生产需求调整机身单元201数量可满足不同伸缩长度的要求。
89.实施例4
90.本实施例提供一种煤矿井下运输系统,在皮带架自动延伸装置300的后方跨骑有移变平台400,移变平台400上安装有移动变电站和电缆。
91.最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其前端分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。