1.本发明涉及携带捷联导引头的高超声速导弹末制导阶段一种制导控制系统设计方法,具体涉及一种考虑视场角约束和舵机延时动态特性的制导控制一体化设计方法。
背景技术:
2.高超声速导弹对高速机动性目标实施精确拦截对制导控制系统的设计带来了严重挑战。尤其是在追击过程中,由于目标的机动极易产生较大视场角。由于捷联导引头结构简单,可靠性高,成本低,以及不受限制的跟踪角速率的优点,被广泛应用。此外,由于捷联导引头视场角范围更小,在追击机动目标的过程中,导弹为了产生较大过载需要不断的调整姿态以实现精确打击,寻的阶段极易出现过大的视场角从而丢失目标导致脱靶。因此,此类携带捷联导引头的导弹在进行制导控制系统设计时,须考虑视场角约束。
3.考虑视场角约束的制导控制系统设计的研究多数集中于制导律的设计。但是,这些制导律的设计的共同点都是基于攻角足够小假设,这时导弹前置角即弹-目连线与导弹速度的夹角可以等同于体视线角。然而,这相当于忽略了导弹的姿态动力学特性。当导弹在拦截过程中需要进行大攻角机动时,这些制导律实现fov约束的假设便不在成立,拦截过程中可能违背fov约束甚至脱靶。所以这样的假设太过于理想而无法在实际过程中实现。
4.制导控制一体化设计方法将制导环和控制环视为一个整体,根据弹体自身运动状态和弹目相对运动关系,直接解算控制指令。由于充分考虑制导系统和控制系统的耦合关系,制导控制一体化有助于提升整个系统的稳定性和精确打击能力。如果将视场角约束考虑在内,采用制导控制一体化设计方法,将大大提升高超声速导弹末制导阶段制导控制系统的拦截性能,减小脱靶量。
5.由于制导控制系统本身就是一个高阶非线性系统,同时还存在由目标机动、时变参数摄动以及外界干扰带来的非匹配不确定性扰动,如果再考虑视场角约束,对制导控制系统设计来说是个不小的挑战。此外,由于高超声速导弹末制导阶段快时变的特点,作为末制导阶段导弹唯一的执行机构,舵机的延时动态特性将严重影响弹体的响应速度,进而影响控制器的性能,不得不加以考虑。
6.综上所述,当前考虑视场角约束的制导律的设计或者制导控制一体化设计方法的研究对象都是携带捷联导引头的亚声速或者超声速导弹,对于高超声速导弹拦截高速机动目标的场景还未见公开文献。
技术实现要素:
7.本发明针对携带捷联导引头的高超声速导弹拦截高速机动目标的场景,提供一种鲁棒性强的制导控制一体化设计方法,同时考虑了视场角约束和舵机的延时动态特性。
8.本发明提出的制导控制一体化设计方法基于反步法、障碍lyapunov函数、滑模控制方法、动态面方法以及绛阶扩张状态观测器提出,主要用于携带捷联导引头的高超声速导弹末制导阶段拦截高速机动目标。首先,建立了纵向平面的严反馈形式的非线性制导控
制一体化模型。随后,基于反步法、障碍lyapunov函数、滑模控制方法设计了制导控制一体化控制器,其中模型中各个通道的复合干扰使用降阶扩张状态观测器进行估计和补偿。
9.步骤一、建立纵向通道的弹-目运动关系、几何关系方程、导弹的动力学方程、舵机的动力学方程。
10.(a)导弹纵向通道的弹-目相对运动关系方程如下:
[0011][0012]
其中r是弹-目相对距离,q
l
是弹-目视线角,和分别是r和q
l
的一阶导数,vm和θm是导弹的速度矢量和速度倾角,v
t
和θ
t
是目标的速度矢量和速度倾角。
[0013]
对上式求导可得
[0014][0015]
式中d
t
=a
t
cos(θ
t-q
l
)是由目标加速度引起不确定性,分别为垂直于导弹速度方向和沿着导弹速度方向的加速度。分别为垂直于目标速度方向的加速度。
[0016]
(b)导弹在纵向平面的几何关系和动力学方程如下:
[0017][0018]
式中α为攻角,为俯仰角,t为导弹推力,y为导弹升力,m为导弹质量,g为重力加速度,d为空气阻力,ωz为俯仰角速率,jz为z轴的转动惯量,δz为舵偏角,m0为与攻角、俯仰角速率、舵偏角有关的俯仰力矩。
[0019]
(c)导弹在纵向平面的升力和俯仰力矩模型为:
[0020][0021][0022]
式中,为动压,ρ为空气密度,s为特征面积,l为特征长度,为升
力系数对攻角、舵偏角的偏导数,c
x0
为零升阻力系数,为阻力系数对α2的偏导数。m
α
代表与攻角有关的俯仰力矩分量,代表与俯仰角速率有关的俯仰力矩分量,代表与舵偏角有关的俯仰力矩分量。分别为俯仰力矩系数对攻角、俯仰角速度、舵偏角的偏导数。
[0023]
将式(4)带入式(3),忽略小项和近似可得
[0024][0025]
式中表示近似误差。
[0026]
将式(6)带入到式(2)中有
[0027][0028]
式中表示系统的复合干扰,包含了系统未建模误差,时变参数引起的摄动以及目标机动带来的干扰。
[0029]
(d)导引头几何关系方程
[0030][0031]
式中qb为体视线角。
[0032]
令d1=-ωz,对式(8)求导有
[0033][0034]
(e)舵机一阶动力学模型可以简化如下:
[0035][0036]
式中,τz为舵机的时间常数,δz为舵偏角,δ
zc
控制器的输入指令。
[0037]
步骤二、建立包含非匹配不确定的严反馈形式的非线性的导弹纵向通道的制导控制一体化模型。
[0038]
为简化公式,令:
[0039]
[0040][0041]
定义系统状态变量所建立的制导控制一体化模型如下:
[0042][0043]
其中,u为控制器的输入设计;
[0044]
式中
[0045][0046]
其中d1、d2、d3、d4为系统各个通道的复合干扰,包含了系统未建模的动态、外部干扰、气动参数变化引起的摄动以及目标机动。
[0047]
步骤三、根据步骤二建立的制导控制一体化模型,本步骤使用反步法将模型分为导引头子系统、制导子系统、攻角子系统、姿态子系统和舵机子系统并进行逆向递推设计,使用障碍lyapunov函数和滑模控制方法设计制导控制一体化控制器。
[0048]
(a)针对导引头子系统,通过blf函数,为保证blos不会超出最大视场角限制k
c1
,即|x1|<k
c1
。定义第一个滑模面
[0049]
s1=x
1-x
1d
ꢀꢀꢀ
(12)
[0050]
式中,x
1d
为系统状态x1的期望值,为保证对目标的精准拦截,期望的视场角x
1d
=0。
[0051]
由式(12)可知,|s1|<k
c1-0=k
b1
,k
b1
为滑模面s1的最大值。
[0052]
定义障碍lyapunov函数为
[0053][0054]
式中a0>0。
[0055]
对式(13)求导,有
[0056][0057]
设计虚拟控制命令x
2c
为:
[0058][0059]
式中需要设计的参数k1>0。
[0060]
为了避免使用反演法引入的虚拟控制命令而带来的“微分爆炸”现象,引入动态面方法,使得x
2c
通过一阶滤波器得到x
2d
和
[0061][0062]
式中τ2>0为滤波器的时间常数。
[0063]
(b)对于制导子系统,即式(11)的第二个方程,为保证虚拟控制命令x2对虚拟指令x
2d
的跟踪,定义第二个滑模面为
[0064]
s2=x
2-x
2d
ꢀꢀꢀ
(17)
[0065]
对上式(17)求导并将式(11)的第二个方程带入得
[0066][0067]
将系统状态x3视为虚拟控制输入,设计虚拟控制命令x
3c
如下:
[0068][0069]
式中需要设计的参数k2>0。
[0070]
同理,将x
3c
通过一阶滤波器得到x
3d
和
[0071][0072]
式中τ3>0为滤波器的时间常数。
[0073]
(c)针对攻角子系统,为保证系统状态x3对虚拟指令x
3d
的跟踪,定义第三个滑模面为:
[0074]
s3=x
3-x
3d
ꢀꢀꢀ
(21)
[0075]
对上式求导将式(11)的第三个方程带入有
[0076][0077]
将系统状态x4作为虚拟控制输入,设计虚拟控制命令x
4c
如下:
[0078][0079]
式中需要设计的参数k3>0。
[0080]
将虚拟控制命令x
4c
通过一阶滤波器得到x
4d
和
[0081][0082]
式中τ4>0为滤波器的时间常数。
[0083]
(d)针对姿态子系统,为保证系统状态x4对虚拟指令x
4d
的跟踪,定义第四个滑模面为
[0084]
s4=x
4-x
4d
ꢀꢀꢀ
(25)
[0085]
对上式求导并将式(11)的第四个方程带入有
[0086][0087]
将系统状态x5作为虚拟控制输入,设计虚拟控制命令x
5c
如下:
[0088][0089]
式中需要设计的参数k4>0。
[0090]
将虚拟控制命令x
5c
通过一阶滤波器得到x
5d
和
[0091][0092]
式中τ5>0为滤波器的时间常数。
[0093]
(e)针对舵机子系统,为保证系统状态x5对虚拟指令x
5d
的跟踪,定义第五个滑模面为:
[0094]
s5=x
5-x
5d
ꢀꢀꢀ
(29)
[0095]
对上式求导并将式(11)的第五个方程带入有
[0096][0097]
控制器的输入设计为
[0098][0099]
式中需要设计的参数k5>0。
[0100]
步骤四、为了提升控制器的鲁棒性,针对上一步骤所设计的虚拟控制命令中的未知的复合干扰,采用降阶扩张状态观测器对其进行估计。
[0101]
[0102]
式中,pi,i=1,2,3,4是辅助变量,是通道间复合干扰di,i=1,2,3,4的估计值,βi>0,i=1,2,3,4为观测器增益。
[0103]
步骤五、综上所述,根据步骤三、四,所设计的考虑视场角约束的制导控制一体化控制器为
[0104][0105]
本发明的有益效果及优点如下:
[0106]
1.本发明首先建立了纵向平面的考虑视场角和舵角的导弹制导控制系统的制导控制一体化模型,并考虑了阻力因素的影响。
[0107]
2.本发明针对高超声速导弹拦截高速机动目标的场景,基于障碍lyapunov函数和滑模控制算法提出了一种制导控制一体化控制器。使用绛阶扩张状态器对系统未知复合干扰的估计并在控制器中加以补偿,保证了控制器的鲁棒性。
[0108]
3.障碍lyapunov函数保证了视场角的有界性,实现了视场角约束,提升了末制导阶段拦截机动目标的可靠性。
附图说明
[0109]
图1是本发明的导弹纵向平面的弹-目相对运动关系示意图。
[0110]
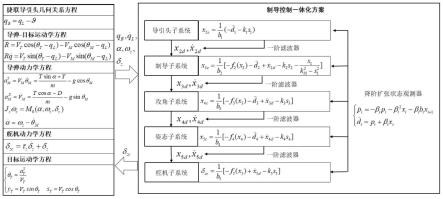
图2是本发明的制导控制一体化设计方法的流程图。
[0111]
图3是本发明基于实例下的导弹拦截机动目标的轨迹图。
[0112]
图4是本发明基于实例下的导弹体视线角曲线。
[0113]
图5是本发明基于实例下的导弹攻角曲线。
[0114]
图6是本发明基于实例下的导弹速度曲线。
[0115]
图7是本发明基于实例下的导弹俯仰角速度曲线。
[0116]
图8是本发明基于实例下的导弹舵偏角曲线。
[0117]
图9是本发明基于实例下的控制器命令输出曲线。
具体实施方式
[0118]
参照图例就本发明的具体实施方式做进一步阐述。
[0119]
如图1是本发明的导弹纵向平面的弹-目相对运动关系示意图,图2是本发明的制导控制一体化设计方法的流程图。给定的仿真初始条件为:导弹的初始坐标(0,0),目标的
初始位置初始弹-目视线角q
l
=30
°
,导弹的初始速度v
m0
=2000m/s,目标的初始速度v
t0
=800m/s,导弹与目标初始速度倾角θ
m0
=35
°
,θ
t0
=0
°
,初始体视线角q
b0
=5
°
,最大视场角初始俯仰角速度ω
z0
=0
°
/s,初始俯仰角,初始舵偏角δ
z0
=0
°
,最大舵角
[0120]
步骤一、首先建立纵向通道的弹-目运动关系、导弹的动力学方程、舵机的动力学方程。
[0121]
(a)导弹纵向通道的弹-目相对运动关系方程如下:
[0122][0123]
其中r是弹-目相对距离,q
l
是弹-目视线角,和分别是r和q
l
的一阶导数,vm和θm是导弹的速度矢量和速度倾角,v
t
和θ
t
是目标的速度矢量和速度倾角。
[0124]
对上式求导可得
[0125][0126]
式中d
t
=a
t
cos(θ
t-q
l
)是由目标加速度引起不确定性,分别为垂直于导弹速度方向和沿着导弹速度方向的加速度。分别为垂直于目标速度方向的加速度。
[0127]
(b)导弹在纵向平面的几何关系和动力学方程如下:
[0128][0129]
式中α为攻角,为俯仰角,t=0为导弹推力,y为导弹升力,m=1200kg为导弹质量,g=9.8m/s2为重力加速度,d为空气阻力,ωz为俯仰角速率,jz=5600kgm2为z轴的转动惯量,δz为舵偏角,m0为与攻角、俯仰角速率、舵偏角有关的俯仰力矩。
[0130]
(c)导弹在纵向平面的升力和俯仰力矩模型为:
[0131]
[0132][0133]
式中,为动压,ρ=1.2196kg/m3为空气密度,s=0.42m2为特征面积,l=0.68m为特征长度,为升力系数对攻角、舵偏角的偏导数,c
x0
=0.10为零升阻力系数,为阻力系数对α2的偏导数。m
α
代表与攻角有关的俯仰力矩分量,代表与俯仰角速率有关的俯仰力矩分量,代表与舵偏角有关的俯仰力矩分量。代表与舵偏角有关的俯仰力矩分量。分别为俯仰力矩系数对攻角、俯仰角速度、舵偏角的偏导数。
[0134]
将式(4)带入式(3),忽略小项和近似可得
[0135][0136]
式中表示近似误差。
[0137]
将式(6)带入到式(2)中有
[0138][0139]
式中表示系统的复合干扰,包含了系统未建模误差,时变参数引起的摄动以及目标机动带来的干扰。
[0140]
(d)导引头几何关系方程
[0141][0142]
式中qb为体视线角。
[0143]
令d1=-ωz,对式(8)求导有
[0144][0145]
(e)舵机一阶动力学模型可以简化如下:
[0146][0147]
式中,τz=0.1为舵机的时间常数,δz为舵偏角,δ
zc
控制器的输入指令。
[0148]
步骤二、建立包含非匹配不确定的严反馈形式的非线性的导弹纵向通道的制导控制一体化模型。
[0149]
为简化公式,令:
[0150][0151][0152]
定义系统状态变量所建立的制导控制一体化模型如下:
[0153][0154]
其中,u为控制器的输入设计;
[0155]
式中
[0156][0157]
其中d1、d2、d3、d4为系统各个通道的复合干扰,包含了系统未建模的动态、外部干扰、气动参数变化引起的摄动以及目标机动。
[0158]
步骤三、根据步骤二建立的制导控制一体化模型,本步骤使用反步法将模型分为导引头子系统、制导子系统、攻角子系统、姿态子系统和舵机子系统并进行逆向递推设计,使用障碍lyapunov函数和滑模控制方法设计制导控制一体化控制器。
[0159]
(a)针对导引头子系统,通过blf函数,为保证blos不会超出最大视场角限制k
c1
=20
°
,即|x1|<k
c1
。定义第一个滑模面
[0160]
s1=x
1-x
1d
ꢀꢀꢀ
(12)
[0161]
式中,x
1d
为系统状态x1的期望值,为保证对目标的精准拦截,期望的视场角x
1d
=0。
[0162]
由式(12)可知,|s1|<k
c1-0=k
b1
,k
b1
为滑模面s1的最大值。
[0163]
定义障碍lyapunov函数为
[0164][0165]
式中a0=1。
[0166]
对式(13)求导,有
[0167][0168]
设计虚拟控制命令x
2c
为:
[0169][0170]
式中需要设计的参数k1=14。
[0171]
为了避免使用反演法引入的虚拟控制命令而带来的“微分爆炸”现象,引入动态面方法,使得x
2c
通过一阶滤波器得到x
2d
和
[0172][0173]
式中τ2=0.01为滤波器的时间常数。
[0174]
(b)对于制导子系统,即式(11)的第二个方程,为保证虚拟控制命令x2对虚拟指令x
2d
的跟踪,定义第二个滑模面为
[0175]
s2=x
2-x
2d
ꢀꢀꢀ
(17)
[0176]
对上式(17)求导并将式(11)的第二个方程带入得
[0177][0178]
将系统状态x3视为虚拟控制输入,设计虚拟控制命令x
3c
如下:
[0179][0180]
式中需要设计的参数k2=15。
[0181]
同理,将x
3c
通过一阶滤波器得到x
3d
和
[0182][0183]
式中τ3=0.01为滤波器的时间常数。
[0184]
(c)针对攻角子系统,为保证系统状态x3对虚拟指令x
3d
的跟踪,定义第三个滑模面为:
[0185]
s3=x
3-x
3d
ꢀꢀꢀ
(21)
[0186]
对上式求导将式(11)的第三个方程带入有
[0187][0188]
将系统状态x4作为虚拟控制输入,设计虚拟控制命令x
4c
如下:
[0189][0190]
式中需要设计的参数k3=25。
[0191]
将虚拟控制命令x
4c
通过一阶滤波器得到x
4d
和
[0192][0193]
式中τ4=0.01为滤波器的时间常数。
[0194]
(d)针对姿态子系统,为保证系统状态x4对虚拟指令x
4d
的跟踪,定义第四个滑模面为
[0195]
s4=x
4-x
4d
ꢀꢀꢀ
(25)
[0196]
对上式求导并将式(11)的第四个方程带入有
[0197][0198]
将系统状态x5作为虚拟控制输入,设计虚拟控制命令x
5c
如下:
[0199][0200]
式中需要设计的参数k4=25。
[0201]
将虚拟控制命令x
5c
通过一阶滤波器得到x
5d
和
[0202][0203]
式中τ5=0.01为滤波器的时间常数。
[0204]
(e)针对舵机子系统,为保证系统状态x5对虚拟指令x
5d
的跟踪,定义第五个滑模面为:
[0205]
s5=x
5-x
5d
ꢀꢀꢀ
(29)
[0206]
对上式求导并将式(11)的第五个方程带入有
[0207][0208]
控制器的输入设计为
[0209][0210]
式中需要设计的参数k5=25。
[0211]
步骤四、为了提升控制器的鲁棒性,针对上一步骤所设计的虚拟控制命令中的未知的复合干扰,采用降阶扩张状态观测器对其进行估计。
[0212][0213]
式中,pi,i=1,2,3,4是辅助变量,是通道间复合干扰di,i=1,2,3,4的估计值,β1=20,β2=30,β3=30,β4=1为观测器增益。
[0214]
步骤五、综上所述,根据步骤三、四,所设计的考虑视场角约束的制导控制一体化控制器为
[0215][0216]
步骤六、仿真实例验证
[0217]
图3给出了弹道拦截机动目标的轨迹曲线,脱靶量为0.88m。
[0218]
图4给出了导弹的体视线角曲线,说明整个拦截过程中体视线角均在最大视场角范围内。
[0219]
图5-图8给出了系统状态变化曲线,图9给出了控制器命令输出曲线。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。