技术特征:
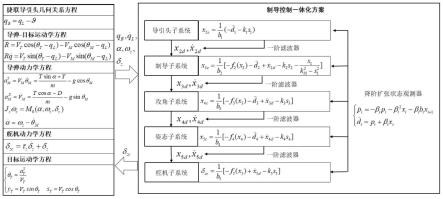
1.一种考虑视场角和舵机延时约束的导弹制导控制一体化方法,其特征在于:步骤一、建立纵向通道的弹-目运动关系、几何关系方程、导弹的动力学方程、舵机的动力学方程;步骤二、建立包含非匹配不确定的严反馈形式的非线性的导弹纵向通道的制导控制一体化模型;步骤三、根据步骤二建立的制导控制一体化模型,使用反步法将模型分为导引头子系统、制导子系统、攻角子系统、姿态子系统和舵机子系统并进行逆向递推设计,使用障碍lyapunov函数和滑模控制方法设计制导控制一体化控制器;步骤四、对虚拟控制命令中的未知的复合干扰,采用降阶扩张状态观测器对其进行估计;步骤五、根据步骤一至步骤四,得出制导控制一体化控制器。2.根据权利要求1所述的考虑视场角和舵机延时约束的导弹制导控制一体化方法,其特征在于:在步骤一中,具体包括如下步骤:1.1导弹纵向通道的弹-目相对运动关系方程如下:其中,r是弹-目相对距离,q
l
是弹-目视线角,和分别是r和q
l
的一阶导数,v
m
和θ
m
是导弹的速度矢量和速度倾角,v
t
和θ
t
是目标的速度矢量和速度倾角;对上式求导得到式中d
t
=a
t
cos(θ
t-q
l
)是由目标加速度引起不确定性,分别为垂直于导弹速度方向和沿着导弹速度方向的加速度;分别为垂直于目标速度方向的加速度;1.2导弹在纵向平面的几何关系和动力学方程如下:式中α为攻角,θ为俯仰角,t为导弹推力,y为导弹升力,m为导弹质量,g为重力加速度,d为空气阻力,ω
z
为俯仰角速率,j
z
为z轴的转动惯量,δ
z
为舵偏角,m0为与攻角、俯仰角速率、舵偏角有关的俯仰力矩;1.3导弹在纵向平面的升力和俯仰力矩模型为:
式中,为动压,ρ为空气密度,s为特征面积,l为特征长度,为升力系数对攻角、舵偏角的偏导数,c
x0
为零升阻力系数,为阻力系数对α2的偏导数;m
α
代表与攻角有关的俯仰力矩分量,代表与俯仰角速率有关的俯仰力矩分量,代表与舵偏角有关的俯仰力矩分量;分别为俯仰力矩系数对攻角、俯仰角速度、舵偏角的偏导数;将式(4)带入式(3),忽略小项和近似得到式中表示近似误差;将式(6)带入到式(2)中有式中表示系统的复合干扰,包含了系统未建模误差,时变参数引起的摄动以及目标机动带来的干扰;1.4导引头几何关系方程q
b
=q
l-θ
ꢀꢀ
(8)式中q
b
为体视线角;令d1=-ω
z
,对式(8)求导有
1.5舵机一阶动力学模型简化如下:式中,τ
z
为舵机的时间常数,δ
z
为舵偏角,δ
zc
控制器的输入指令。3.根据权利要求2所述的考虑视场角和舵机延时约束的导弹制导控制一体化方法,其特征在于:在步骤二中,令:特征在于:在步骤二中,令:定义系统状态变量所建立的制导控制一体化模型如下:其中,u为控制器的输入设计;式中其中d1、d2、d3、d4为系统各个通道的复合干扰,包含了系统未建模的动态、外部干扰、气动参数变化引起的摄动以及目标机动。4.根据权利要求2或3所述的考虑视场角和舵机延时约束的导弹制导控制一体化方法,其特征在于:在步骤三中,具体包括如下步骤:3.1针对导引头子系统,通过blf函数,为保证blos不会超出最大视场角限制k
c1
,即|x1|<k
c1
;定义第一个滑模面s1=x
1-x
1d
ꢀꢀ
(12)式中,x
1d
为系统状态x1的期望值,为保证对目标的精准拦截,期望的视场角x
1d
=0;由式(12)得到,|s1|<k
c1-0=k
b1
,k
b1
为滑模面s1的最大值;定义障碍lyapunov函数为
式中a0>0;对式(13)求导,有设计虚拟控制命令x
2c
为:式中需要设计的参数k1>0;为了避免使用反演法引入的虚拟控制命令而带来的“微分爆炸”现象,引入动态面方法,使得x
2c
通过一阶滤波器得到x
2d
和和式中τ2>0为滤波器的时间常数;3.2对于制导子系统,即式(11)的第二个方程,为保证虚拟控制命令x2对虚拟指令x
2d
的跟踪,定义第二个滑模面为s2=x
2-x
2d
ꢀꢀ
(17)对上式(17)求导并将式(11)的第二个方程带入得将系统状态x3视为虚拟控制输入,设计虚拟控制命令x
3c
如下:式中需要设计的参数k2>0;同理,将x
3c
通过一阶滤波器得到x
3d
和和式中τ3>0为滤波器的时间常数;3.3针对攻角子系统,为保证系统状态x3对虚拟指令x
3d
的跟踪,定义第三个滑模面为:s3=x
3-x
3d
ꢀꢀ
(21)对上式求导将式(11)的第三个方程带入有将系统状态x4作为虚拟控制输入,设计虚拟控制命令x
4c
如下:
式中需要设计的参数k3>0;将虚拟控制命令x
4c
通过一阶滤波器得到x
4d
和和式中τ4>0为滤波器的时间常数;3.4针对姿态子系统,为保证系统状态x4对虚拟指令x
4d
的跟踪,定义第四个滑模面为s4=x
4-x
4d
ꢀꢀ
(25)对上式求导并将式(11)的第四个方程带入有将系统状态x5作为虚拟控制输入,设计虚拟控制命令x
5c
如下:式中需要设计的参数k4>0;将虚拟控制命令x
5c
通过一阶滤波器得到x
5d
和和式中τ5>0为滤波器的时间常数;3.5针对舵机子系统,为保证系统状态x5对虚拟指令x
5d
的跟踪,定义第五个滑模面为:s5=x
5-x
5d
ꢀꢀ
(29)对上式求导并将式(11)的第五个方程带入有控制器的输入设计为式中需要设计的参数k5>0。5.根据权利要求4所述的考虑视场角和舵机延时约束的导弹制导控制一体化方法,其特征在于:在步骤四中,采用降阶扩张状态观测器对其进行估计,具体为:
式中,p
i
,i=1,2,3,4是辅助变量,是通道间复合干扰d
i
,i=1,2,3,4的估计值,β
i
>0,i=1,2,3,4为观测器增益。6.根据权利要求5所述的考虑视场角和舵机延时约束的导弹制导控制一体化方法,其特征在于:在步骤五中,考虑视场角约束的制导控制一体化控制器为:
技术总结
本发明提出一种考虑视场角和舵机延时约束的导弹制导控制一体化方法,主要用于携带捷联导引头的高超声速导弹末制导阶段拦截高速机动目标。首先,建立了纵向平面的严反馈形式的非线性制导控制一体化模型。随后,基于反步法、障碍Lyapunov函数、滑模控制方法设计了制导控制一体化控制器,其中模型中各个通道的复合干扰使用降阶扩张状态观测器进行估计和补偿。本发明针对高超声速导弹拦截高速机动目标的场景,使用绛阶扩张状态器对系统未知复合干扰的估计并在控制器中加以补偿,保证了控制器的鲁棒性。障碍Lyapunov函数保证了视场角的有界性,实现了视场角约束,提升了末制导阶段拦截机动目标的可靠性。截机动目标的可靠性。截机动目标的可靠性。
技术研发人员:张小跃 李志兵 吴扬波 白光远 崔越
受保护的技术使用者:北京航空航天大学
技术研发日:2022.09.23
技术公布日:2022/11/29
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。