1.本发明涉及路径示教数据生成装置、路径示教数据生成方法以及记录介质。
背景技术:
2.例如,通过给出机器人的工具行进的路径作为示教数据来控制工业用机器人。例如,在专利文献1中记载了利用二维cad(computer-aided design:计算机辅助设计)数据来生成提供给机器人的示教数据。现有技术文献专利文献
3.专利文献1:日本特开2005-332347号公报
技术实现要素:
要解决的技术问题
4.但是,用于驱动控制机器人的路径示教数据需要表示没有分支的一条路径。然而,在设计用的三维cad数据中,多条样条曲线多重连接(作为一例,参照图4)。因此,以往在图4所示那样的由三维cad所描绘的三维形状中,用户需要逐次指定机器人的工具行进的路径,用户的负担大。
5.本发明是鉴于这样的情况而完成的,其目的在于提供能够减轻用户的负担的路径示教数据生成装置、路径示教数据生成方法以及记录介质。解决技术问题所采用的技术手段
6.本发明的第一方面是一种路径示教数据生成装置,用于使用包含多条曲线的信息的设计数据,生成机器人的驱动控制所需要的路径示教数据,该路径示教数据生成装置具备:选择部,选择与作为连接源的曲线的连接源曲线的终点连接的其他曲线作为连接目标曲线,将所选择的所述其他曲线作为下一条所述连接源曲线,依次选择成为所述连接目标曲线的曲线;以及路径生成部,基于由所述选择部所选择的多条所述曲线,生成所述路径示教数据,所述选择部在存在与所述连接源曲线的终点连接的多条所述其他曲线的情况下,基于所述连接源曲线的最终切线方向和多条所述其他曲线的各开始切线方向,选择任意一条所述其他曲线作为所述连接目标曲线。
7.本发明的第二方面是一种路径示教数据生成方法,用于使用包含多条曲线的信息的设计数据,生成机器人的驱动控制所需要的路径示教数据,该路径示教数据生成方法由计算机执行以下工序:判定是否存在多条与作为连接源的曲线的连接源曲线的终点连接的其他曲线的工序;在不存在多条所述其他曲线的情况下,选择所述其他曲线作为连接目标曲线的工序;在存在多条所述其他曲线的情况下,基于所述连接源曲线的最终切线方向和多条所述其他曲线的各开始切线方向,选择任意一条所述其他曲线作为所述连接目标曲线的工序;将所选择的所述其他曲线作为下一条所述连接源曲线的工序;以及基于所选择的多条所述曲线,生成所述路径示教数据的工序。
8.本发明的第三方面是一种计算机可读取的记录介质,记录有用于使计算机作为上述路径示教数据生成装置发挥功能的程序。技术效果
9.根据本发明,起到能够减轻用户的负担的效果。
附图说明
10.图1是概略地表示本发明的一个实施方式所涉及的机器人系统的整体结构的系统概略图。图2是表示本发明的一个实施方式所涉及的路径示教数据生成装置所具备的硬件结构的一例的概略结构图。图3是表示本发明的一个实施方式所涉及的路径示教数据生成装置所具备的功能的一例的功能框图。图4是表示三维模型的一例的图。图5是用于说明本发明的一个实施方式所涉及的选择部所执行的选择工序的图。图6是用于说明本发明的一个实施方式所涉及的选择部所执行的选择工序的图。图7是用于说明本发明的一个实施方式所涉及的选择部所执行的选择工序的图。图8是用于说明本发明的一个实施方式所涉及的选择部所执行的选择工序的图。图9是表示本发明的一个实施方式所涉及的路径示教数据生成方法的顺序的一例的流程图。图10是表示本发明的一个实施方式所涉及的路径示教数据生成方法的顺序的一例的流程图。图11是表示本发明的一个实施方式所涉及的路径示教数据生成方法的顺序的一例的流程图。
具体实施方式
11.以下,参照附图对本发明的一个实施方式所涉及的路径示教数据生成装置、路径示教数据生成方法以及记录介质进行说明。
12.图1是概略地表示本发明的一个实施方式所涉及的机器人系统100的整体结构的系统概略图。如图1所示,机器人系统100例如具备路径示教数据生成装置1、机器人控制装置2以及机器人3。
13.路径示教数据生成装置1是用于使用包含多条曲线的信息的设计数据来生成机器人3的驱动控制所需要的路径示教数据的装置。
14.机器人控制装置2是驱动控制机器人3的控制装置。机器人控制装置2例如基于由路径示教数据生成装置1所生成的路径示教数据来驱动控制机器人3。例如,路径示教数据生成装置1和机器人控制装置2经由网络连接,成为能够收发数据的结构。由路径示教数据生成装置1所生成的路径示教数据例如经由网络发送到机器人控制装置2,在机器人控制装置2中使用。
15.机器人3例如是工业用机器人,例如,基于机器人控制装置2的驱动控制,安装于手臂前端的工具(以下称为“机器人工具”。)行进基于路径示教数据的路径,进行粘合剂的涂
布、去毛刺、螺钉紧固等各种设定的加工等。
16.图2是表示本发明的一个实施方式所涉及的路径示教数据生成装置1所具备的硬件结构的一例的概略结构图。如图2所示,路径示教数据生成装置1是所谓的计算机,例如具备cpu(central processing unit:中央处理器)11、主存储器12、存储部13、外部接口14、通信接口15、输入部16以及显示部17等。这些各个部位直接或经由总线间接地相互连接,相互协同地执行各种处理。另外,输入部16以及显示部17例如也可以经由网络连接。
17.cpu11例如通过在经由总线连接的存储部13中存储的os(operating system:操作系统)来进行路径示教数据生成装置1整体的控制,并且通过执行在存储部13中存储的各种程序来执行各种处理。
18.主存储器12例如由高速缓冲存储器、ram(random access memory:随机存取存储器)等可写入的存储器构成,作为进行cpu11的执行程序的读出、利用执行程序进行的处理数据的写入等的作业领域而被利用。
19.存储部13是非临时性记录介质(non-transitory computer readable storage medium),例如是rom(read only memory:只读存储器)、hdd(hard disk drive:硬盘驱动器)、闪存等。存储部13例如存储windows(注册商标)、ios(注册商标)、android(注册商标)等用于进行路径示教数据生成装置1整体的控制的os、bios(basic input/output system:基本输入输出系统)、用于对周边设备类进行硬件操作的各种设备驱动器、各种应用软件以及各种数据和文件等。另外,在存储部13中存储有用于实现各种处理的程序、用于实现各种处理所需要的各种数据。
20.外部接口14是用于与外部设备连接的接口。作为外部设备的一例,可列举外部监视器、usb存储器、外置hdd等。需要说明的是,在图1所示的例子中,仅图示了一个外部接口,但也可以具备多个外部接口。
21.通信接口15与网络连接并与其他装置进行通信,作为用于进行信息收发的接口发挥功能。例如,通信接口15例如通过有线或无线与其他装置进行通信。作为无线通信,可列举bluetooth(注册商标)、wi-fi、使用了专用通信协议的通信等。作为有线通信的一例,可列举有线lan(local area network:局域网)等。
22.输入部16例如是键盘、鼠标、触控板等用于用户对路径示教数据生成装置1给予指示的用户接口。
23.显示部17例如是液晶显示器、有机el(electroluminescence:电致发光)显示器等。另外,显示部17也可以是重叠有触摸面板的触摸面板显示器。
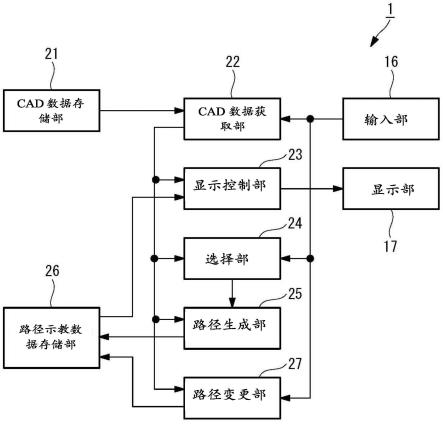
24.图3是表示路径示教数据生成装置1所具备的功能的一例的功能框图。如图3所示,路径示教数据生成装置1例如具备cad数据存储部21、cad数据获取部22、显示控制部23、选择部24、路径生成部25、路径示教数据存储部26以及路径变更部27。
25.这些功能的全部或一部分例如通过处理电路(processing circuitry)来实现。例如,用于实现以下所示功能的一系列的处理,作为一例,以程序(例如,路径示教数据生成程序)的形式存储在存储部13中,cpu11将该程序读出到主存储器12,执行信息的加工、运算处理,由此实现各种功能。
26.需要说明的是,程序可以应用预先安装在存储部13中的方式、以存储在其他计算
机可读取的存储介质中的状态提供的方式、经由有线或无线的通信单元分发的方式等。计算机可读取的存储介质是指磁盘、光磁盘、cd-rom、dvd-rom、半导体存储器等。
27.cad数据存储部21中例如存储有多个三维cad数据。三维cad数据是与由机器人3所加工的产品有关的设计数据。设计数据可以是最终加工产品的设计用数据,也可以是中间品的设计用数据。
28.三维cad数据例如包含多条曲线(样条曲线)的信息。在此,“曲线”是也包含“直线”的概念,作为一例,可列举样条曲线。各曲线的信息包括该曲线的第一端部的坐标信息和第二端部的坐标信息,以及用于连接第一端部和第二端部的信息。作为用于连接第一端部和第二端部的信息的一例,可列举切线信息、矢量信息等。另外,各曲线也可以具有朝向信息。在该情况下,第一端部以及第二端部中的一方具有作为起点的信息,另一方具有作为终点的信息。
29.cad数据获取部22在从输入部16输入了指定存储在cad数据存储部21中的多个三维cad数据中的任意一个的输入信息的情况下,从cad数据存储部21获取所指定的三维cad数据。
30.显示控制部23使由cad数据获取部22所获取的三维cad数据所表示的三维模型显示于显示部17。
31.另外,显示控制部23使基于由后述的路径生成部25所生成的路径示教数据的路径显示于显示部17。由此,能够在视觉上向用户提示机器人工具行进的路径。
32.选择部24例如在通过由用户操作输入部16而输入了指定任意曲线及其起点的输入信息的情况下,将所指定的曲线设定为作为连接源的曲线的连接源曲线,并且选择与该连接源曲线的终点连接的其他曲线作为连接目标曲线。
33.例如,假设在图4所示的三维模型显示于显示部17的情况下,由用户操作输入部16以指定点a以及曲线l。在该情况下,如图5所示,选择部24将点a设定为起点p1,并且将包含该起点p1的曲线l1设定为连接源曲线。
34.接下来,选择部24根据三维cad数据确定与连接源曲线的终点连接的其他曲线。由此,例如,如图6所示,作为与连接源曲线l1的终点p2连接的其他曲线,确定为曲线l2。然后,在所确定的其他曲线为一条的情况下,选择其他曲线作为连接目标曲线,并且将所选择的其他曲线作为下一条连接源曲线,选择成为连接目标曲线的曲线。
35.例如,在图6所示的例子中,由于与终点p2连接的其他曲线l2为一条,所以选择曲线l2作为连接目标曲线,并且将该曲线l2设定为下一条连接源曲线。然后,确定为与连接源曲线l2的终点p3连接的其他曲线。然后,通过重复这样的处理,例如,如图6所示,曲线l2~l6依次被选择为连接目标曲线,并且依次被设定为连接源曲线。
36.另外,选择部24在存在与连接源曲线连接的多条其他曲线的情况下,基于连接源曲线的最终切线方向(例如,终端矢量)和多条其他各曲线的各开始切线方向(例如,始端矢量),选择任意一条其他曲线作为连接目标曲线。更具体而言,选择部24计算连接源曲线的最终切线方向与多条其他曲线的各开始切线方向所成的角的角度即连接角度θ,选择计算出的连接角度θ最小的其他曲线作为连接目标曲线。
37.例如,在图6所例示的三维模型中,作为与作为连接源曲线的曲线l6的终点p7连接
的其他曲线,存在曲线l7和曲线l8。在该情况下,选择部24例如分别计算作为连接源曲线的曲线l6与曲线l7的连接角度,以及曲线l6与曲线l8的连接角度。在此,图7是放大表示曲线l6的周边的图。
38.连接角度θ例如由以下的式子表示。
39.其中,为连接源曲线的终端矢量,为连接目标曲线的始端矢量。
40.选择部24选择在计算出的连接角度中具有最小连接角度的曲线作为连接目标曲线。选择部24例如选择由上述式(1)表示的cosθ的值最接近1的曲线作为连接目标曲线。由此,在图7所例示的三维模型中,选择曲线l7作为曲线l6的连接目标曲线。需要说明的是,在图7所示的三维模型中,由于各曲线l6、曲线l7和曲线l8大致由直线表示,所以以不区分始端矢量、终端矢量的方式表示,但在为样条曲线的情况下,由于该曲线的开始切线方向和最终切线方向可能是不同的方向,所以在该情况下需要区分。
41.另外,在连接源曲线与多条其他曲线的各连接角度相等的情况下,选择部24根据与连接源曲线的起点连接的曲线的起点以及连接源曲线的起点和终点来确定平面。然后,基于该平面和多条其他曲线的各开始切线方向,选择任意一条其他曲线作为连接目标曲线。
42.例如,在三维模型为图8所示的长方体的情况下,与作为连接源曲线(曲线中也包含直线)的曲线ln连接的其他曲线是曲线l
n 1
和曲线l
n 2
,另外,由于这些曲线各自与连接源曲线分别以直角相交,所以连接角度相等。在这种情况下,选择部24根据与连接源曲线ln的起点pn连接的曲线l
n-1
的起点p
n-1
以及连接源曲线ln的起点pn和终点p
n 1
来确定平面(图8中的斜线部分)。然后,运算所确定的平面的法线矢量与曲线l
n 1
、曲线l
n 2
各自的开始切线方向的余角,选择余角最小的曲线作为连接目标曲线。
43.在此,在将平面的法线矢量与曲线的开始切线矢量所成的角度设为d的情况下,余角e由以下的式(2)表示。
[0044][0045]
其结果,在图8所示的三维模型中,选择曲线l
n 1
作为连接目标曲线。
[0046]
需要说明的是,在不存在与连接源曲线的起点连接的曲线的情况下(例如开始点的情况等),也可以利用规定了三维模型的正交坐标系中的任意平面(例如,xy平面)的法线矢量。
[0047]
路径生成部25基于由选择部24所选择的多条曲线来生成路径示教数据。具体而言,路径生成部25通过在各曲线的信息中附加用于将由选择部24依次选择的曲线按顺序连接在一起的连接信息,从而生成路径示教数据。
[0048]
由路径生成部25所生成的路径示教数据存储在路径示教数据存储部26中。
[0049]
路径变更部27例如在由用户对由显示控制部23显示于显示部17的机器人工具的路径输入了修正指示的情况下,基于所输入的修正指示来变更路径示教数据,并更新路径示教数据存储部26中的该路径示教数据。
[0050]
接着,参照图9~图11对本实施方式所涉及的路径示教数据生成方法进行说明。图9~图11是表示本实施方式所涉及的路径示教数据生成方法的处理顺序的一例的流程图。以下说明的处理例如通过cpu11将存储在存储部13中的程序(路径示教数据生成程序)读出到主存储器12中并执行来实现。
[0051]
首先,当由用户指定任意的三维cad数据时,从cad数据存储部21中获取所指定的三维cad数据(sa1),将由获取的三维cad数据所表示的三维模型显示于显示部17(sa2)。接下来,当由用户指定任意的曲线和起点时,将所指定的曲线设定为连接源曲线(sa3),确定与该连接源曲线的终点连接的其他曲线(sa4)。接着,判定所确定的其他曲线是否为多条(sa5)。其结果,在其他曲线为一条的情况下(sa5:否),选择所确定的其他曲线作为连接目标曲线(sa6),转移到步骤sa14。
[0052]
另一方面,在存在多条其他曲线的情况下(sa5:是),分别运算连接源曲线的最终切线方向(例如,终端矢量)与各条其他曲线的开始切线方向(例如,始端矢量)所成的角度即连接角度(图10的sa7)。接下来,确定在运算的连接角度中具有最小角度的其他曲线(sa8),判定所确定的其他曲线是否确定为一条(sa9)。其结果,在确定为一条的情况下(sa9:是),选择所确定的其他曲线作为连接目标曲线(sa10),转移到图9的步骤sa14。
[0053]
另一方面,在步骤sa9中,在所确定的其他曲线没有确定为一条的情况下(sa9:否),例如,如图8所例示的那样,当存在连接角度相等的多条其他曲线时,确定根据与连接源曲线的起点连接的曲线的起点以及连接源曲线的起点和终点所确定的平面(sa11)。然后,运算所确定的平面的法线矢量与多条其他曲线的各开始切线方向所成的角度的余角(sa12)。接下来,选择余角最小的其他曲线作为连接目标曲线(sa13),转移到图9的步骤sa14。
[0054]
在图9的步骤sa14中,判定所选择的连接目标曲线的终点是否满足处理结束条件(sa14)。作为处理结束条件的一例,例如可列举所选择的连接目标曲线的终点是最初的连接源曲线的起点、所选择的连接目标曲线的终点是由用户指定的终点等。
[0055]
其结果,在不满足处理结束条件的情况下(sa14:否),将所选择的连接目标曲线设定为连接源曲线(sa15),返回步骤sa4,重复进行上述处理。由此,依次选择连成一体的多条曲线。
[0056]
另一方面,在步骤sa14中,在连接目标曲线的终点满足处理结束条件的情况下(sa14:是),基于所选择的多条曲线的信息来生成路径示教数据(图11的sa16)。接下来,将所生成的路径示教数据存储在路径示教数据存储部中(sa17),并且使显示部17显示基于该路径示教数据的机器人工具的驱动路径(sa18)。
[0057]
接下来,判定是否由用户输入了机器人工具的驱动路径的修正指示(sa19)。例如,用户确认显示部17所显示的机器人工具的移动路径是否有误,如果有误,则通过操作输入部16,手动进行修正。这样,在由用户进行了驱动路径的修正的情况下(sa19:是),基于修正指示来变更路径示教数据存储部26的路径示教数据(sa20),转移到步骤sa21。
[0058]
另一方面,在步骤sa19中,在没有输入来自用户的修正指示的情况下(sa19:否),转移到步骤sa21。
[0059]
在步骤sa21中,判定是否由用户输入了结束指示。其结果,在没有输入结束指示的情况下(sa21:否),返回步骤sa19,重复进行后续的处理。另一方面,在步骤sa21中,在由用
户输入了结束指示的情况下(sa21:是),结束该处理。
[0060]
通过执行上述处理,在路径示教数据存储部26中存储基于三维cad数据生成的路径示教数据。然后,例如,根据来自机器人控制装置2(参照图1)的请求指示,从路径示教数据存储部26读出规定的路径示教数据,在机器人控制装置2中用于机器人3的驱动控制。
[0061]
如以上说明的那样,根据本实施方式所涉及的路径示教数据生成装置1、路径示教数据生成方法以及记录介质,起到以下的作用效果。
[0062]
根据本实施方式,选择与作为连接源的曲线的连接源曲线的终点连接的其他曲线作为连接目标曲线,将所选择的其他曲线设定为下一条连接源曲线,进一步选择与该连接源曲线连接的其他曲线。通过重复进行该处理,选择连成一体的多条曲线,基于所选择的多条曲线生成路径示教数据。由此,能够根据三维cad数据自动地生成路径示教数据。其结果,能够减轻生成路径示教数据给用户带来的负担。
[0063]
另外,在存在与连接源曲线的终点连接的多条其他曲线的情况下,换言之,在作为与连接源曲线连接的曲线存在多个候补的情况下,基于连接源曲线的最终切线方向(例如,终端矢量)和多条其他曲线的各开始切线方向(例如,开始矢量),选择任意一条其他曲线作为连接目标曲线。
[0064]
更具体而言,计算出连接源曲线的最终切线方向与多条其他曲线的各开始切线方向所成的角度即连接角度,选择该连接角度最小的其他曲线作为连接目标曲线。
[0065]
这样,由于考虑其他曲线相对于连接源曲线的连接角度来选择连接目标曲线,所以能够选择适当的曲线作为连接目标曲线。
[0066]
进而,在成为连接目标的候补的多条其他曲线的连接角度相等的情况下,根据与连接源曲线的起点连接的曲线的起点以及连接源曲线的起点和终点来确定平面。然后,基于该平面与多条其他曲线的各开始切线方向,选择任意一条其他曲线作为连接目标曲线。由此,例如,如图8所例示的那样,即使在相对于连接源曲线以相同角度连接的多条其他曲线作为连接目标曲线的候补存在的情况下,也能够选择适当的连接目标曲线。
[0067]
另外,设置有用于由用户指定最初的连接源曲线及其起点的输入部16。由此,用户能够指定所期望的起点,并且能够从该起点指定路径的前进方向。
[0068]
另外,由于基于所生成的路径示教数据的机器人3的驱动路径显示于显示部17,所以用户能够容易地确认基于自动生成的路径示教数据的机器人3的驱动路径。进而,在用户对机器人的驱动路径进行了修正作业的情况下,基于该修正指示来变更路径示教数据。由此,在基于路径示教数据的机器人的驱动路径不适当的情况下,用户能够容易地进行该修正作业。
[0069]
以上,使用实施方式对本发明进行了说明,但本发明的技术范围并不限定于上述实施方式所记载的范围。在不脱离发明的主旨的范围内,能够对上述实施方式施加各种变更或改良,施加了该变更或改良的方式也包含在本发明的技术范围内。另外,也可以适当组合上述实施方式。另外,在上述实施方式中说明的路径示教数据生成方法的流程也是一例,可以在不脱离本发明的主旨的范围内删除不需要的步骤、追加新的步骤、调换处理顺序。
[0070]
例如,在上述实施方式中,对由用户指定最初的曲线以及起点的情况进行了说明,但曲线以及起点的设定并不限定于上述例子。例如,在预先决定了初始条件的情况下,可以
基于该初始条件自动设定最初的连接源曲线以及起点,另外,也可以使用其他方法。
[0071]
另外,在上述实施方式中,也可以在选择部24选择连接目标曲线时的判定条件中设置连接角度的阈值。例如,在连接目标曲线相对于连接源曲线以锐角连接的情况下,很可能不是用户期望的连接。为了避免这种不适当的连接,例如,选择部24也可以进行以下的判定。
[0072]
例如,选择部24在确定了与连接源曲线的终点连接的其他曲线的情况下,运算所确定的其他曲线的连接角度,判定运算出的连接角度是否为阈值以上。然后,在连接角度小于阈值的情况下,选择所确定的其他曲线作为连接目标曲线。另外,也可以在连接角度为阈值以上的情况下,判定是否还有其他的与连接源曲线连接的其他曲线,在还有其他的情况下,从候补中排除该其他曲线。此外,例如,也可以在显示部17上显示连接源曲线与连接目标曲线的连接关系,让用户来选择。这样的判定处理例如能够设置在图9中的步骤sa4与步骤sa5之间,或者步骤sa5与步骤sa6之间。上述连接角度的阈值例如能够设定为大于90
°
的任意的值。
[0073]
另外,在上述实施方式中,例示说明了多个三维cad数据存储在cad数据存储部21中的情况,但三维cad数据的存储场所没有特别限定。例如,也可以存储在与网络连接的特定服务器中,经由网络从该服务器下载三维cad数据,由此cad数据获取部22获取三维cad数据。另外,三维cad数据可以存储在可装卸于路径示教数据生成装置1的计算机可读取的存储介质(例如,磁盘、光磁盘、cd-rom、dvd-rom、半导体存储器等)中,可以构成为:在这些与路径示教数据生成装置1连接的状态下cad数据获取部22获取三维cad数据。
[0074]
同样,在上述实施方式中,例示了路径示教数据存储在路径示教数据存储部26中的情况,但路径示教数据的存储场所并不限定于该例。即,与上述三维cad数据同样,可以存储在特定的服务器中,也可以存储在可装卸于路径示教数据生成装置1的计算机可读取的存储介质中。
[0075]
进而,在上述实施方式中,采用了路径示教数据生成装置1和机器人控制装置2经由网络连接,经由网络收发路径示教数据的方式,但路径示教数据的收发并不限定于该例。例如,路径示教数据也可以经由计算机可读取的记录介质,从路径示教数据生成装置1提供给机器人控制装置2。
[0076]
另外,机器人控制装置2可以包含路径示教数据生成装置1,也可以在机器人控制装置2中生成路径示教数据。即,可以构成为:在机器人控制装置2中搭载路径示教数据生成装置1所具备的各种功能。符号说明
[0077]1…
路径示教数据生成装置,2
…
机器人控制装置,3
…
机器人,11
…
cpu,12
…
主存储器,13
…
存储部,14
…
外部接口,15
…
通信接口,16
…
输入部,17
…
显示部,21
…
cad数据存储部,22
…
cad数据获取部,23
…
显示控制部,24
…
选择部,25
…
路径生成部,26
…
路径示教数据存储部,27
…
路径变更部,100
…
机器人系统。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
