1.本实用新型涉及机器视觉技术领域,尤其涉及一种用于柔性振动盘上料抓取的定位视觉系统。
背景技术:
2.常规的振动盘上料,只能对一些形状比较规则,体型较大的产品进行上料,但对于精密的电子产品,通常具备不规则性以及体积较小,以及产品种类多的特性。这就对一般的振动盘上料造成了困扰。常见导致的问题:卡料,产品种类很多,需要准备多种形状的一般振动盘,造成体积和成本浪费。
3.柔性振动盘可解决这些问题,但是因为柔性振动盘的来料存在位置随机性,因此需要机器视觉对产品的位置进行定位检测,然后将坐标数据传输给机器人,引导机器人进行抓取。
技术实现要素:
4.本实用新型提供一种用于柔性振动盘上料抓取的定位视觉系统以解决传统的振动盘因为比较单一,无法同时应对各种形状,大小的产品,最终导致成本浪费,效率浪费的问题,为解决上述技术问题,本实用新型提供的用于柔性振动盘上料抓取的定位视觉系统包括柔性振动盘、通信模块、plc控制器、2d工业相机、图像处理器和机械臂抓取装置;所述柔性振动盘、通信模块、plc控制器、2d工业相机和图像处理器依次相连接;所述图像处理器与通信模块相连接;所述 plc控制器与机械臂抓取装置相连接。还包括光源模块,所述光源模块包括设置于柔性振动盘料盘下侧的白色背光光源和设置于柔性振动盘料盘正上方的白色碗形光源,2d工业相机视线穿过白色碗形光源的通孔拍摄产品。
5.优选的,所述图像处理器包括参数设定模块、比对模块和显示模块,所述图像处理器通过比对模块与通信模块相连接。
6.优选的,所述参数设定模块用于设定标准图像参数。
7.优选的,所述比对模块用于将2d工业相机采集的图像与标准图像参数进行比对。
8.优选的,所述用于柔性振动盘上料抓取的定位视觉系统,还包括储存器,所述储存器与图像处理器相连接。
9.优选的,考虑抓取的定位精度,相机采用2000万像素镜头使用 16mm焦距镜头,镜头表面到产品表面的距离达到1200mm。
10.优选的,所述2d相机有两个,设置于所述柔性振动盘正上方。两个2d相机间距为柔性振动料盘长度的一半。
11.优选的,柔性振动盘的料盘采用透明的柔性材质,优选采用pe、 pp、pvc或者pu等可透光的材质,其表面光滑有韧性,透光性好。
12.与相关技术相比较,本实用新型提供的用于柔性振动盘上料抓取的定位视觉系统具有如下有益效果:
13.本实用新型提供本发明可取代传统的手工上料以及普通振动盘上料。对于电子类产品,具有产品小,种类多,形状复杂,传统的振动盘因为比较单一,无法同时应对各种形状,大小的产品,最终导致成本浪费,效率浪费。而柔性振动盘 机器视觉 机械臂抓取装置正好完美解决问题。机器视觉就充当了眼睛的作用,实时检测出产品的当前位置和角度,引导机器人抓取。
附图说明
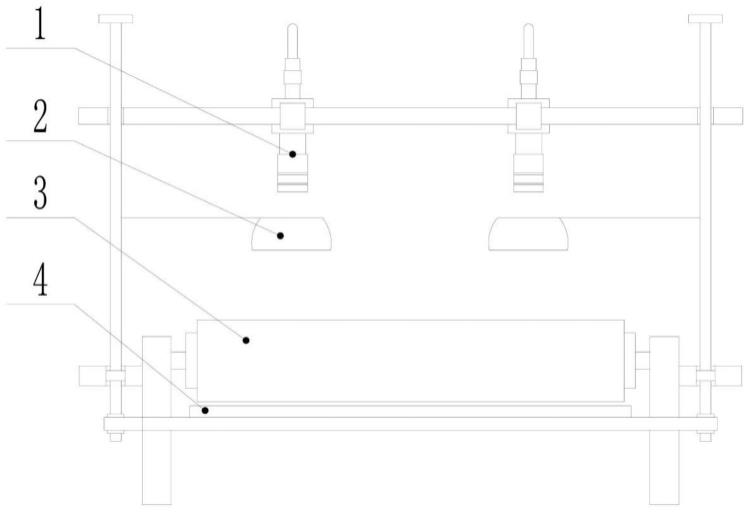
14.图1为本实用新型提供的用于柔性振动盘上料抓取的定位视觉系统的一种较佳实施例的相机光源空间位置示意图。
15.图2为本实用新型提供的用于柔性振动盘上料抓取的定位视觉系统的一种较佳实施例的结构框图。
16.图3为本实用新型提供的用于柔性振动盘上料抓取的定位视觉系统的显示模块显示图像。
具体实施方式
17.下面结合附图和实施方式对本实用新型作进一步说明。
18.用于柔性振动盘上料抓取的定位视觉系统包括柔性振动盘3、通信模块、plc控制器、2d工业相机1、图像处理器和机械臂抓取装置;所述柔性振动盘3、通信模块、plc控制器、2d工业相机1和图像处理器依次相连接;所述图像处理器与通信模块相连接;所述plc控制器与机械臂抓取装置相连接,还包括光源模块,所述光源模块包括设置于柔性振动盘3料盘下侧的白色背光光源4和设置于柔性振动盘3 料盘正上方的白色碗形光源2,2d工业相机1视线穿过白色碗形光源 2的通孔拍摄产品。所述2d相机有两个,设置于所述柔性振动盘正上方。两个2d相机间距为柔性振动料盘长度的一半。
19.所述图像处理器包括参数设定模块、比对模块和显示模块,所述图像处理器通过比对模块与通信模块相连接。
20.所述参数设定模块用于设定标准图像参数。
21.所述比对模块用于将2d工业相机1采集的图像与标准图像参数进行比对。
22.所述用于柔性振动盘上料抓取的定位视觉系统,还包括储存器,所述储存器与图像处理器相连接。
23.所述投影成像背景为白色。
24.本实用新型提供的用于柔性振动盘上料抓取的定位视觉系统的工作原理如下:
25.plc和传感器作为辅助对相机进行触发开始检测以及结果的接收。产品达到指定位置以后,传感器接收到产品到位的信号。传感器把信号传输给相机,触发相机开始拍摄产品。相机根据预设的相机敏感度,曝光时间进行图像拍照。拍摄的图像传输到控制器,嵌入在控制器的软件进行图像处理和分析,利用相关的检测工具可以计算出当前产品的位置和角度。通过网络传输的方式把检测结果数据传输给 plc/机械臂抓取装置。
26.下面提供本实用新型的实践例子:
27.1、相机安装以及设定参数
28.为获得准确的定位精度,相机采用2000万像素,镜头使用16mm 焦距镜头,镜头表
面到产品表面的距离达到1200mm,在避开机械臂抓取装置抓取时的机械干涉的同时获得最优的图像获取精度。
29.光源使用白色背光光源和白色碗形光源,白色背光光源设置于料盘下侧,光线透过料盘,碗形光源设置于料盘正上方,相机视线穿过所述碗形光源中心孔。投影成像使背景为白色,产品的轮廓为黑色. 产品的外轮廓清晰可见,可稳定检测到产品的位置。
30.2、校正
31.抓取之前需要把相机的坐标系统移到机械臂抓取装置坐标系里去,因此需要提前做9点校正和旋转中心校正。
32.因为涉及到产品震动的随机性,可能会存在机械臂抓取装置 360
°
旋转的情况.此时对校正的机械臂抓取装置的旋转中心的精度要求比较高,如果旋转中心存在误差的话,角度越大,产生的xy误差就会越大.因此,利用高精度校正方法,可以精确计算机械臂抓取装置的旋转中心的位置。
33.3、检测
34.使用轮廓功能对产品的外轮廓进行搜索定位,准确找到产品的位置x和y坐标,以及当前的角度.并转化计算为机械臂抓取装置的位置。
35.4.输出
36.通过网络或rs232c的方式可以把检测的结果输出给plc控制器,plc控制器收到结果数据后引导机械臂抓取装置到对应的位置进行抓取。
37.与相关技术相比较,本实用新型提供的用于柔性振动盘上料抓取的定位视觉系统具有如下有益效果:本实用新型提供本发明可取代传统的手工上料以及普通振动盘上料。对于电子类产品,具有产品小,种类多,形状复杂,传统的振动盘因为比较单一,无法同时应对各种形状,大小的产品,最终导致成本浪费,效率浪费。而柔性振动盘 机器视觉 机械臂抓取装置正好完美解决问题。机器视觉就充当了眼睛的作用,实时检测出产品的当前位置和角度,引导机器人抓取。
38.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本实用新型的专利保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。