1.本发明涉及模拟空间环境下加载试验领域,特别是涉及一种空间站机械臂关节空间环境下性能测试的模拟加载设备,可以实现空间环境下分时对两台关节的力矩加载及速度加载模拟,进而测试空间站机械臂关节的功能性能参数。
背景技术:
2.关节是空间机械臂最核心的部件,是机械臂实现在轨运动功能的基础,是保证机械臂运动精度、连接刚度、输出力矩等各项指标的关键。机械臂在轨要执行舱段转位对接、支持航天员出舱、舱外货物搬运等任务。不同的任务使得关节受载情况复杂,如何在地面测试中模拟关节在轨受载状态,准确获取关节的动力学特性,对关节设计的可靠性验证有着重要意义。
3.目前国内对于关节减速器性能测试设计了一系列模拟加载装置,对于机器人关节减速器的性能测试提出了相应方法。通过对现有机器人关节及减速器性能测试设备的研究发现,现有的关节及减速器性能测试设备不能满足空间机械臂关节测试需要原因:1)加载测试设备未与空间环境模拟设备结合,只能在常温常压环境下对关节进行加载测试;2)测试设备性能单一,完成关节减速器的力矩加载测试、输入端力矩特性测试、速度特性测试、减速特性测试需要多台设备;3)测试对象唯一,只能对单独1台减速器进行测试,而空间环境模拟的抽真空及升降温过程较长,对多台关节测试时需要开罐更换关节,效率低、时间长;4)加载力矩较小,一般小于1000nm,而空间站机械臂关节的测试需要加载超过0~2000nm,加载力矩范围广,载荷变化大,且需要根据仿真力矩曲线对关节载荷进行模拟。
技术实现要素:
4.本发明解决的技术问题是:克服现有技术的不足,提供一种空间站机械臂关节空间环境加载测试设备及方法,解决了现有测试设备测试项目单一、测试力矩小、载荷模拟单一、测试对象唯一、力矩载荷不能精确加载、加载设备安装调整不方便的问题。
5.本发明的技术方案是:一种空间站机械臂关节空间环境加载测试设备,用于空间站机械臂关节常温常压和空间真空高低温环境下模拟加载测试,包括热真空环境模拟系统、力矩加载测试系统、速度加载测试系统;
6.力矩加载测试系统为热真空环境模拟系统内的两个机械臂关节分时进行力矩加载,测试关节在加载力矩下的性能;速度加载测试系统为热真空环境模拟系统内的两个关节分别进行速度加载,测试关节减速器不同速度下的性能;热真空环境模拟系统为关节提供在轨真空、高低温环境模拟。
7.所述热真空环境模拟系统组成包括设备机架、真空容器、热沉、关节安装平台、真空抽气系统、高低温系统、测温系统、磁流体密封结构等。真空容器为不锈钢圆柱体,卧式安装在设备机架上,圆柱体的前端面为大门,真空容器为关节提供真空环境。热沉呈鱼骨式分布在真空容器的圆柱内表面及大门内表面,为关节提供100k冷黑背景及-150℃~ 150℃范
围温变环境。关节安装平台布置在真空容器内部底面,为测试关节提供在真空容器内的安装接口。真空容器底部配置有接口,用于真空抽气系统与高低温系统连接。真空抽气系统包含连接管路及分子泵、阀等,高低温系统包含连接管路、液氮储槽、风机等。真空抽气系统与高低温系统的连接管路集成在设备机架内部。真空抽气系统的分子泵、阀及高低温系统的风机等安装在真空容器后侧外部。高低温系统的液氮储槽安装在室外,真空抽气系统为真空容器获得真空环境,高低温系统为热沉提供高低温介质循环支持。测温系统包含测量和控制两部分组成,测温系统的测量部分安装在真空容器内部,测温系统的控制部分设置在真空容器外部,测温系统显示热真空环境模拟系统状态,并控制热真空环境模拟系统正常运行。真空容器的左右两侧设置有法兰接口,使用磁流体密封结构密封,用于关节轴系贯穿连接。
8.所述力矩加载测试系统,由升降平台、1套力矩电机、力矩传感器、圆光栅、膜片联轴器、控制及测试系统等组成。升降平台安装在真空容器的左侧面外面,力矩电机固定在升降平台上,升降平台可以上下升降,前后移动,带动力矩电机移动位置,和真空容器内的不同关节连接;力矩电机通过膜片联轴器连接力矩传感器、圆光栅,并穿过热真空环境模拟系统中的磁流体密封结构,连接真空容器内的膜片联轴器,最终与关节输出端连接。力矩电机可以为被测关节提供空间力矩受载情况模拟,力矩传感器用于测量力矩电机的实际输出力矩,圆光栅用于测量力矩电机输出的速度,膜片联轴器用于各部件的轴线连接。控制及测试系统用于力矩电机的控制、力矩传感器及圆光栅数据的读取及处理、关节力矩加载测试及数据处理。
9.所述速度加载测试系统,由2套伺服电机、膜片联轴器、圆光栅、差速器、安装平台、控制及测试系统等组成。速度加载测试系统的安装平台放置在真空容器的右侧面外面,伺服电机固定在安装平台上,伺服电机通过膜片联轴器连接力矩传感器、圆光栅,并穿过真空模拟系统中的磁流体密封结构,连接真空容器内的差速器,最终和关节输入端连接。伺服电机为关节提供在轨运动速度加载曲线模拟,力矩传感器用来测量伺服电机的实际输出力矩,圆光栅用于测量伺服电机实际输出的速度,差速器用于伺服电机输出速度的减速,膜片联轴器用于各部件的轴向连接,控制及测试系统用于伺服电机的控制、力矩传感器和圆光栅的数据读取和处理、关节速度加载测试及数据处理。
10.所述力矩加载测试系统,可以进行关节整机性能测试,包含关节精度测试(空载运动动态跟踪精度、负载运动动态跟踪精度),力矩特性测试(额定输出力矩、最大输出力矩、连续堵转力矩、最小输出力矩),功率测试(额定功率、最大功率、同转速下负载功率曲线、同载荷下负载功率曲线,转速特性测试(额定负载转速、不同负载的转速范围),惯性特性测试(空载加速/停止时间、额定负载加速/停止时间、不同惯量负载加速/停止时间、惯量负载曲线模拟)。
11.速度加载测试系统可以实现关节力矩测试(启动力矩、负载驱动力矩、运动摩擦力矩),转速特性测试(转速范围、传动比精度、速度波动),减速特性曲线(转速摩擦力矩曲线、效率曲线)。
12.一种空间站机械臂关节用空间环境模拟加载测试方法,步骤如下:根据测试内容,选择使用力矩加载测试系统或速度加载测试系统。若为力矩加载系统测试项目,连接膜片联轴器,将关节输出端与力矩传感器、圆光栅及力矩电机输出轴连接,实现对关节输出端的
力矩加载。启动热真空环境模拟系统,对关节的工作环境进行真空及高低温空间环境模拟。通过控制及测试系统,对力矩电机进行控制,按测试要求对关节进行力矩加载。通过控制及测试系统,读取力矩电机输出力矩及速度数据,根据力矩及速度结果计算关节的性能测试结果。
13.若为速度加载测试系统测试项目,连接膜片联轴器,将关节输入端与差速器、力矩传感器、圆光栅及伺服电机连接,实现对关节输入端的速度加载。启动热真空环境模拟系统,对关节的工作环境进行真空及高低温空间环境模拟。通过控制及测试系统,对伺服电机进行控制,按测试要求对关节进行速度加载。通过控制及测试系统,读取伺服电机输出力矩及速度数据,根据力矩及速度结果计算关节的性能测试结果。
14.一种空间站机械臂关节用空间环境模拟加载测试方法,步骤如下:控制及测试系统主要为显示设备、工控机、输入设备。工控机对力矩电机的驱动控制系统及伺服电机的驱动控制系统进行控制,将关节的负载力矩曲线发送至力矩电机驱动控制系统,将关节输入端的速度运动曲线发送至伺服电机驱动控制系统中,从而实现力矩加载和速度加载。圆光栅编码器、高精度力矩传感器将关节输入端与输出端两侧的位置、速度、力矩信息反馈回工控机以及力矩电机控制系统与伺服电机控制系统,从而实现力矩与速度闭环的精确加载控制。
15.本发明与现有技术相比的优点在于:
16.(1)本发明综合了力矩加载模拟、速度加载模拟、空间环境模拟,可以实现空间站机械臂关节模拟空间环境下的力矩及速度加载测试。
17.(2)本发明一次测试可以密封2台关节,实现对2台关节的分时加载,可以有效减少空间环境模拟的循环时间,提高测试效率。
18.(3)本发明的关节力矩加载系统可以根据关节仿真结果的力矩曲线,对关节进行精确加载,模拟关节真实的受载力矩、冲击载荷和交变载荷。
19.(4)本发明的力矩加载测试系统,可以对关节的真实运动情况进行测试,进而得到关节的实际运动轨迹;
20.(5)本发明的力矩加载测试系统,可以电动调节,提高了产品装调过程中的效率。
四、附图说明
21.图1为本发明的系统组成图;
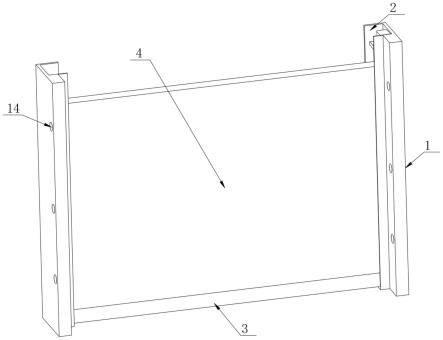
22.图2为本发明的结构组成图;
23.图3为本发明力矩加载测试系统升降平台组成图;
24.图4为本发明真空容器内部分设备组成图;
25.图5为本发明差速器的组成图;
26.图6为本发明真空容器外部分设备组成图;
27.图7为本发明热真空环境模拟系统组成图;
28.图8为本发明的控制与数据交互流程图;
29.图9为本发明控制系统图。
五、具体实施方式
30.如图1-9所示,空间站机械臂关节空间环境加载测试设备,由力矩加载测试系统、速度加载测试系统、热真空环境模拟系统三部分组成。力矩加载测试系统主要任务是给真空容器内的两个机械臂关节分时进行力矩加载,实现对关节输出端相关性能的测试;速度加载测试系统主要任务是为真空容器内的两个关节分别进行速度加载,实现对关节输入端相关性能的测试;热真空环境模拟系统主要为关节提供在轨真空及高、低温环境模拟。
31.力矩加载测试系统由升降平台a1、力矩电机2、第一膜片联轴器3、第一力矩传感器4、第二膜片联轴器5、第一圆光栅6、平台b7、第三膜片联轴器8、力矩电机输出轴26及控制系统等组成。力矩电机2安装在升降平台a1,通过第一膜片联轴器3连接第一力矩传感器4,再通过第二膜片联轴器5连接至固定在平台b7上第一圆光栅6及力矩电机输出轴26,最终通过第三膜片联轴器8,连接到关节安装平台9上的被测机械臂关节10输出端。
32.力矩加载系统中的力矩电机2为被测关节10提供加载力矩输出。关节不同工作任务下的受载力矩曲线,发送至控制系统中,控制系统控制力矩电机2输出加载力矩,加载力矩通过第一膜片联轴器3、第二膜片联轴器5、第三膜片联轴器8传递至被测关节10的输出端,进而实现对关节10输出端模拟加载。第一力矩传感器4用于测量力矩电机2实际输出力矩的大小,圆光栅6用于读取力矩电机2输出的速度。
33.升降平台a1由直线轴承19、移动电机20、升降电机21、调节手轮22、水平导轨23、水平导轮丝杠24和支撑架25组成。
34.力矩电机2通过可降平台a1的移动功能实现1台电机对2台关节的分时加载。支撑架25用于支撑力矩电机2的重量。力矩电机2工作时,坐落在支撑架25上面的大理石平台上,并通过螺栓螺母上下夹紧大理石平台固定,保证力矩电机2输出力矩时稳定可靠。升降平台可实现旋转运动、升降运动、水平运动。需要切换关节10时,第一膜片联轴器3断开连接,力矩电机2与轴系的连接断开。松开力矩电机2与大理石平台固定的螺栓螺母,此时通过升降电机21的旋转,托举力矩电机2沿直线轴承19向上运动,力矩电机2脱离大理石平台,力矩电机2即可平移和旋转运动。移动电机20旋转,推动力矩电机2随着水平导轨23、导轮丝杠24运动至另一台被测关节10轴线位置。随后通过调节手轮22实现力矩电机2位置的角度调整。
35.速度加载测试系统由差速减速器11、第四膜片联轴器12、第二圆光栅13、平台c14、第五膜片联轴器15、第二力矩传感器16、第六膜片联轴器17、速度伺服电机18及控制系统等组成。速度伺服电机18安装在平台c14上,通过第六膜片联轴器17连接第二力矩传感器16,再通过第五膜片联轴器15,连接第二圆光栅13,最后通过第四膜片联轴器12连接差速减速器11,进而连接至被测机械臂关节10的输入端。
36.差速减速器11由输入轴27、输出轴28、减速齿轮29及三维调节底座30组成。减速齿轮29采用三级直齿轮传动。齿轮采用空间固体润滑措施,可以满足真空罐内的真空度和高低温环境。差速减速器11的1个输入轴27对应2个输出轴,可以分别驱动被测关节10的主、备份驱动机构。
37.控制系统控制关节按速度加载曲线驱动伺服电机18转动,伺服电机18的加载力矩通过膜片联轴器6、第二力矩传感器16、第五膜片联轴器15、圆光栅13及膜片联轴器4传递至关节输入端驱动机构,驱动被测关节10按速度加载曲线运动。关节输入端加载系统安装在平台c14上。速度加载测试系统有2套伺服电机18,分别驱动2台被测关节10。
38.热真空环境模拟系统由关节安装平台9、输出端磁流体密封结构31和输入端磁流体密封结构33、真空容器32、热沉34、设备机架35、真空抽气系统36、高低温系统37、测温系统38组成。关节安装平台9安装在真空容器32底部,用于被测关节9的安装;输出端磁流体密封结构31和输入端磁流体密封结构33用于力矩电机输出轴26及力矩电机输入轴27的穿舱密封;热沉34分布在真空容器32的内壁上,为被测关节9提供100k的冷黑背景,及-150℃~ 150℃范围温变环境。真空抽气系统36、高低温系统37、测温系统38用于实现真空高低温环境的控制。
39.测试设备中设计的联轴器均选用膜片联轴器,膜片联轴器使用不需要润滑,工作温度范围大,且同轴度容差较大,最大定位容差可达2mm,可有效保证测试设备与被测关节的同轴度指标。
40.力矩加载测试系统可以实现关节精度测试(空载运动动态跟踪精度、负载运动动态跟踪精度),力矩特性测试(额定输出力矩、最大输出力矩、连续堵转力矩、最小输出力矩),功率测试(额定功率、最大功率、同转速下负载功率曲线、同载荷下负载功率曲线,转速特性测试(额定负载转速、不同负载的转速范围),惯性特性测试(空载加速/停止时间、额定负载加速/停止时间、不同惯量负载加速/停止时间、惯量负载曲线模拟)。
41.速度加载测试系统可以实现关节力矩测试(启动力矩、负载驱动力矩、运动摩擦力矩),转速特性测试(转速范围、传动比精度、速度波动),减速特性曲线(转速摩擦力矩曲线、效率曲线)。
42.空间站机械臂关节空间环境加载测试设备的力矩和速度加载,是通过控制测试设备两侧的力矩电机2和伺服电机18,使其加载值按照预设的力矩和速度曲线变化。其控制系统共分为三个层次,分别为执行层(加载设备)、驱动层(电柜)与中控层(监控台与工控机)。执行层由力矩电机(伺服电机)、力矩传感器、圆光栅等组成,是具体用来实现精确加载以及力矩、位置、速度反馈测量的执行器;驱动层由电机控制器、圆光栅解码器以及频率变送器组成,用于驱动执行层设备并依次处理反馈信息。力矩传感器测得的频率形式的力矩信号传输给频率变送器,频率变送器将转换得到的电压信号反馈给电机控制器,通过电机控制器的a/d采样得到力矩信号。圆光栅测得的数据传送给光栅解码器,光栅解码器对光栅信号进行解码,并通过usb传输给工控机,获取力矩加载侧与速度加载侧的位置、速度信息。力矩或速度的闭环控制在电机控制器中实现,电机控制器将得到的力矩信息通过can总线反馈给工控机,工控机通过can总线下发控制命令,从而完成相应的加载任务。
43.本发明说明书中未作详细描述的内容属本领域技术人员的公知技术。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。