1.本发明涉及激光扫描技术领域,尤其涉及一种三维激光扫描方法及系统。
背景技术:
2.高端制造业的发展,对产品质量有更高的要求,因此对工业产品的质检效率也提出了更高的要求,特别是在激光扫描领域,人们对三维激光扫描时的精度要求也越来越高。
3.目前市面上存在一种基于双目成像理论研发的高精度三维激光扫描仪,其具备两个检测相机,配合激光发射装置能够扫描出物体的三维坐标,进而完成物体的扫描。
4.但是,现有的上述类型的扫描仪皆为固定机构,即设备的尺寸、体积、重量固定,无法根据不同的被测物体或不同的工况进行调整,例如无法针对精细零件缩短相机距离以提高精度,无法改变扫描仪的形状以伸入狭小空间内等,若强行改变设备结构,则又需要对相机进行重新校准,严重影响使用便捷性。
技术实现要素:
5.有鉴于此,有必要提供一种三维激光扫描方法及系统,用以实现改变相机距离后仍能快速便捷地进行扫描。
6.为达到上述技术目的,本发明采取了以下技术方案:
7.第一方面,本发明提供了一种三维激光扫描方法,包括:
8.获取已标定扫描仪对应的初始标定点的真实坐标,其中所述扫描仪包括两个扫描相机;
9.根据待扫描物体的特征参数调整两个所述扫描相机之间的基线长度;
10.使用调整后的所述扫描仪扫描所述初始标定点,并获取调整后的所述初始标定点的像素坐标;
11.根据所述像素坐标和所述真实坐标,得到两个所述扫描相机的调整参数;
12.根据所述调整参数及调整后的所述基线长度,对所述待扫描物体进行扫描,得到扫描结果。
13.进一步的,所述根据所述像素坐标和所述真实坐标,得到两个所述扫描相机的调整参数,包括:
14.根据所述像素坐标和所述真实坐标,得到相机坐标系;
15.根据所述相机坐标系,得到所述调整参数。
16.进一步的,所述调整参数包括相机外参。
17.进一步的,所述获取已标定扫描仪对应的初始标定点的真实坐标,包括:
18.设置所述初始标定点;
19.分别获取所述初始标定点对应两个所述扫描相机的两个初始像素坐标;
20.根据两个所述初始像素坐标得到视差;
21.根据所述视差得到所述初始标定点对应的检测深度;
22.根据所述检测深度及所述初始像素坐标,得到所述初始标定点的所述真实坐标。
23.进一步的,所述像素坐标和所述初始像素坐标均为所述初始标定点的成像在像素坐标系中的坐标,所述像素坐标系为二维正交坐标系,所述像素坐标系所在的平面与所述扫描相机的成像平面重合。
24.进一步的,所述相机坐标系为三维正交坐标系,所述相机坐标系的原点与所述扫描相机的光心重合,所述相机坐标系的一个坐标轴与所述扫描相机的光轴重合。
25.进一步的,所述待扫描物体的特征参数包括所述待扫描物体的尺寸值。
26.进一步的,所述待扫描物体的特征参数包括所述待扫描物体的目标扫描精度。
27.进一步的,所述待扫描物体的特征参数包括所述待扫描物体位于的环境参数。
28.第二方面,本发明还提供一种激光扫描系统,包括扫描仪和控制器,所述扫描仪包括两个扫描相机,所述控制器包括存储器和处理器,其中:
29.所述存储器,用于存储程序;
30.所述处理器,与所述存储器耦合,用于执行所述存储器中存储的所述程序,以实现上述任一项中的所述三维激光扫描方法中的步骤。
31.本发明提供一种三维激光扫描方法及系统,其通过设定一个初始标定点,先扫描获得初始标定点的真实坐标,再根据待扫描物体的具体特征参数,调整扫描仪中两个扫描相机的基线,并依据之前获得的真实坐标得到调整后的扫描相机的调整参数,得到调整参数后便可以结合调整后的基线长度,对待测物体进行扫描。相比于现有技术,本发明提供的方法能够根据具体工况灵活地调整相机基线,并且能够基于初始标定点在调整后快速地得到扫描相机在调整后的有关参数,避免了复杂的校准过程,具备很好的便捷性,能极大地提高扫描精度及效率。
附图说明
32.图1为本发明提供的三维激光扫描方法一实施例的方法流程图;
33.图2为本发明提供的三维激光扫描方法一实施例的计算示意图;
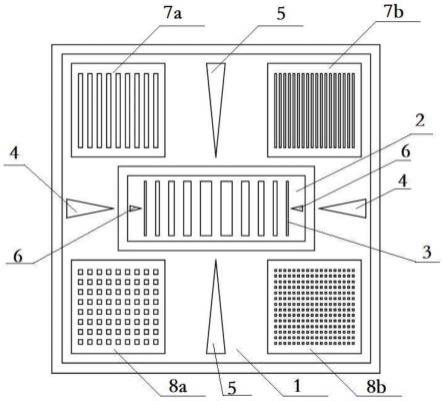
34.图3为本发明提供的三维激光扫描方法一实施例中扫描仪的结构示意图;
35.图4为图3中滑轨及滑块的结构示意图。
具体实施方式
36.下面结合附图来具体描述本发明的优选实施例,其中,附图构成本技术一部分,并与本发明的实施例一起用于阐释本发明的原理,并非用于限定本发明的范围。
37.在本技术的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
38.在本文中提及“实施例”意味着,结合实施例描述的特定特征、结构或特性可以包含在本发明的至少一个实施例中。在说明书中的各个位置出现该短语并不一定均是指相同的实施例,也不是与其它实施例互斥的独立的或备选的实施例。本领域技术人员显式地和隐式地理解的是,本文所描述的实施例可以与其它实施例相结合。
39.本发明允许操作者在扫描过程中根据需要灵活地改变扫描相机之间的基线,通过获取一个设定好的初始标定点的坐标,实现快速方便地获取调整后扫描相机的相关参数,以在增加扫描灵活性的同时,降低扫描步骤的繁琐程度。
40.需要说明的是,本文种的基线,是指两个相机的光心之间的连线,该连线的长度即为基线长度。
41.结合图1所示,本发明的一个具体实施例,公开了一种三维激光扫描方法,包括:
42.s101、获取已标定扫描仪对应的初始标定点的真实坐标,其中所述扫描仪包括两个扫描相机;
43.s102、根据待扫描物体的特征参数调整两个所述扫描相机之间的基线长度;
44.s103、使用调整后的所述扫描仪扫描所述初始标定点,并获取调整后的所述初始标定点的像素坐标;
45.s104、根据所述像素坐标和所述真实坐标,得到两个所述扫描相机的调整参数;
46.s105、根据所述调整参数及调整后的所述基线长度,对所述待扫描物体进行扫描,得到扫描结果。
47.本发明提供一种三维激光扫描方法,其通过设定一个初始标定点,先扫描获得初始标定点的真实坐标,再根据待扫描物体的具体特征参数,调整扫描仪中两个扫描相机的基线,并依据之前获得的真实坐标得到调整后的扫描相机的调整参数,得到调整参数后便可以结合调整后的基线长度,对待测物体进行扫描。相比于现有技术,本发明提供的方法能够根据具体工况灵活地调整相机基线,并且能够基于初始标定点在调整后快速地得到扫描相机在调整后的有关参数,避免了复杂的校准过程,具备很好的便捷性,能极大地提高扫描精度及效率。
48.结合图3及图4所示,为了更好的实施本实施例中的过程,本实施例中所采用的扫描仪包括两个扫描相机1、滑轨2、滑块3和激光器4,所述滑块3滑动连接于所述滑轨2,一个所述扫描相机1和所述激光器4均连接于所述滑块3,另一个所述扫描相机1连接于所述滑轨2。具体地,激光器4和一个扫描相机1通过4/n个固定孔连接于滑块3,实现滑动伸缩,并且可实现多尺寸的调节,同时又确保结构的稳定性。滑轨2上具有已标定好的刻度,使操作者能够读出基线距离。
49.具体地,在一个优选的实施例中,步骤s101、获取已标定扫描仪对应的初始标定点的真实坐标,其中所述扫描仪包括两个扫描相机,得到真实坐标的具体过程包括:
50.设置所述初始标定点;
51.分别获取所述初始标定点对应两个所述扫描相机的两个初始像素坐标;
52.根据两个所述初始像素坐标得到视差;
53.根据所述视差得到所述初始标定点对应的检测深度;
54.根据所述检测深度及所述初始像素坐标,得到所述初始标定点的所述真实坐标。
55.上述过程中,初始标定点可以根据现场情况任意选择,仅需保证调整基线前后扫描仪合初始标定点之间的位置可以相对固定,例如选择工作台上的某个参照物作为初始标定点,也可以额外单独设计出一个支架,用以固定初始标定点及扫描仪。
56.另外,上述过程中的真实坐标,是指初始标定点在真实坐标系内的坐标,真实坐标系则为基于现实世界的坐标系,用于描述物体在现实世界中的位置进而可以映射到三维软件中得到物体的形状等信息。初始像素坐标和后文中调整后得到的像素坐标均为所述设定标定点的成像在像素坐标系中的坐标,所述像素坐标系为二维正交坐标系,所述像素坐标系所在的平面与所述扫描相机的成像平面重合。
57.本发明还提供一优选的实施例,用于更加清楚地介绍上述步骤s101,结合图2所示,以p点为初始标定点,b表示基线长度,o
l
和or表示两个扫描相机的光心,p
l
和pr表示初始标定点在两个扫描相机成像平面上的成像,需要说明的是,为了方便理解,本实施例中两个扫描相机的成像平面共面,f表示扫描相机的光心至成像平面的距离,l表示成像平面的宽度,x
l
和xr表示初始标定点在两个成像平面上的位置,初始标定点在两个成像平面上的坐标为初始像素坐标,二者均为二维坐标,x
l
和xr分别为两个初始像素坐标中的横坐标。
58.根据两个初始像素坐标可得视差d:
59.d=|x
l-xr|
60.同时,两个成像点p
l
和pr之间的距离p
l
pr为:
[0061][0062]
通过上述二式可以得到初始标定点的检测深度z:
[0063][0064]
本实施例中的检测深度为初始标定点至基线之间的垂直距离。得到检测深度后,便可以得到初始标定点的真实坐标。根据检测深度得到真是坐标的过程为现有技术,本实施例中不做过多说明。
[0065]
得到真实坐标后,便可以进行步骤s102、根据待扫描物体的特征参数调整两个所述扫描相机的基线长度,其中待扫描物体的特征是指与扫描物体有关的特征,包括待扫描物体的尺寸大小、扫描所需的精度以及其所处的环境。而特征参数为能够将上述特征量化的具体值。
[0066]
作为优选的实施例,本实施例中的所述待扫描物体的特征参数包括所述待扫描物体的尺寸值,实际应用时,当待扫描物体尺寸过大时,可以改变扫描仪结构,延长基线,可以获得更大的扫描范围,节省工作时间。
[0067]
作为优选的实施例,本实施例中的所述待扫描物体的特征参数还包括所述待扫描物体的目标扫描精度。实际中若对零件扫描精度较高时,可以改变扫描仪结构,缩短基线,提高扫描精度,能够轻松高效地获取精准的三维数据,有助于更快速、精准地测量零件。
[0068]
作为优选的实施例,本实施例中的所述待扫描物体的特征参数包括所述待扫描物体位于的环境参数。环境参数可以为扫描现场的操作空间的尺寸大小。当操作空间为狭窄工作场景时,如管道、狭小空间下,改变扫描仪结构,缩短基线,可以使扫描仪尺寸更小,方便使用者在狭窄工作环境下进行扫描工作。
[0069]
调整基线后,相机有关的参数发生改变,因此需要进行步骤s103、使用调整后的所述扫描仪扫描所述初始标定点,并获取调整后的所述初始标定点的像素坐标。在本实施例中,两个扫描相机的成像平面平行,因此调整基线后,两个扫描相机的成像平面仍旧平行,此时扫描初始标定点时,可以使调整后的成像平面与初始标定点的距离等于之前的检测深度,方便后续计算。
[0070]
之后便可以进行步骤s104,在一个优选的实施例中,步骤s104、根据所述像素坐标和所述真实坐标,得到两个所述扫描相机的调整参数,具体包括:
[0071]
根据所述像素坐标和所述真实坐标,得到相机坐标系;
[0072]
根据所述相机坐标系,得到所述调整参数。
[0073]
其中,所述相机坐标系为三维正交坐标系,所述相机坐标系的原点与所述扫描相机的光心重合,所述相机坐标系的一个坐标轴与所述扫描相机的光轴重合。
[0074]
在一个优选的实施例中,所述调整参数包括相机外参,相机外参用于反应相机在真实世界中的位姿。实际中,通过调整后的相机坐标系,还可以得到调整后的其他参数,如两个扫描相机对应的两个相机坐标系之间的转换关系等。本实施例中,通过初始标定点可以得到相机调整后的外参,省去了通过校准板重新进行的校准的繁琐的过程,提高了扫描效率。
[0075]
进一步的,可以执行步骤s105、根据所述调整参数及调整后的所述基线长度,对所述待扫描物体进行扫描,得到扫描结果。在一个优选的实施例中,上述过程包括极线校正及立体匹配两个过程,极线校正即校正同一个点在两幅图像上的映射,校正后两幅图片的点的坐标y值是一样的,可以减少待匹配的点数量。立体匹配即求点跟点的视差,每个点的视差都求出来后就可以得到对应点的三维坐标。
[0076]
为了更好的实施上述步骤,本发明还提供一种激光扫描系统一实施例,该系统包括扫描仪和控制器,所述扫描仪包括两个扫描相机,所述控制器包括存储器和处理器,其中:
[0077]
所述存储器,用于存储程序;
[0078]
所述处理器,与所述存储器耦合,用于执行所述存储器中存储的所述程序,以实现上述任一实施例中的所述三维激光扫描方法中的步骤。
[0079]
本发明提供一种三维激光扫描方法及系统,其通过设定一个初始标定点,先扫描获得初始标定点的真实坐标,再根据待扫描物体的具体特征参数,调整扫描仪中两个扫描相机的基线,并依据之前获得的真实坐标得到调整后的扫描相机的调整参数,得到调整参数后便可以结合调整后的基线长度,对待测物体进行扫描。相比于现有技术,本发明提供的方法能够根据具体工况灵活地调整相机基线,并且能够基于初始标定点在调整后快速地得到扫描相机在调整后的有关参数,避免了复杂的校准过程,具备很好的便捷性,能极大地提高扫描精度及效率。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。