1.本技术属于医疗康复训练器械领域,具体涉及一种卧姿上肢康复机器人。
背景技术:
2.根据中国国家卫健委发布的《中国脑卒中防治指导规范(2021年版)》原文:“早期以锻炼上肢的伸肌和下肢的屈肌为活动原则;活动幅度和频率的选择依病情逐渐增加;入院后
…
适度被动活动;被动活动主要用于患肢各关节,依关节的功能确定活动方向。运动时由上到下、由健侧肢体到患侧肢体、由近及远,有顺序地进行肢体的内收、伸展、主动、抗阻训练,活动时注意从大关节开始过渡到小关节,动作轻柔缓慢。”在偏瘫早期,患者大部分时间都在卧床,无法坐起或站立。早期临床康复方法是患者保持卧姿,由康复辅助人员提供被动训练。这种康复训练完全依赖医护人员或者家人的重复性劳动,多数偏瘫患者在离开医院后,不能保障有效的康复训练。
3.为了提高对早期脑卒中患者的社会支持及提高其运动治疗依从性,除依靠患者自身意志力进行训练以外,目前的方式是提供上肢康复机器人来保证康复训练的有效实施。但现有上肢康复机器人多是基于坐姿或者站姿进行研究和训练的,并不适用于卧姿,不符合偏瘫早期患者大部分时间都在卧床的实际情况,这造成了康复机器人研究的断层。若因康复设备的缺失,造成偏瘫早期康复缺少社会支持,使卒中患者不能坚持康复训练,会影响其康复的最佳时期,甚至会造成终身肢体残疾的严重后果,因此,早期临床康复训练中缺少适用于卧姿的上肢康复机器人是亟需解决的问题。
技术实现要素:
4.本发明是为了解决上述问题而进行的,目的在于提供一种卧姿上肢康复机器人。
5.本发明提供了一种卧姿上肢康复机器人,用于提供卧姿状态下的上肢康复训练,具有这样的特征,包括:水平运动机构,用于带动上肢水平运动;升降机构,安装在水平运动机构上,用于带动上肢升降运动;以及角度调整机构,安装在升降机构上,用于调整上肢的角度;其中,水平运动机构、升降机构、角度调整机构通过组合运动带动上肢在空间内运动。
6.在本发明提供的卧姿上肢康复机器人中,还可以具有这样的特征:水平运动机构包括底座、第一转轴、以及第一转动臂,第一转轴安装在底座上,第一转动臂与第一转轴转动连接且可绕第一转轴水平转动;升降机构安装在第一转动臂上,并由第一转动臂带动进行水平转动。
7.在本发明提供的卧姿上肢康复机器人中,还可以具有这样的特征:水平运动机构包括相连接的x轴直线导轨和y轴直线导轨;升降机构安装在x轴直线导轨或y轴直线导轨上,并由x轴直线导轨和y轴直线导轨带动进行水平移动。
8.在本发明提供的卧姿上肢康复机器人中,还可以具有这样的特征:升降机构包括第二转动臂,第二转动臂的一端与水平运动机构转动连接,第二转动臂可绕该转动连接处竖直转动;角度调整机构安装在第二转动臂的另一端,并由第二转动臂带动进行竖直转动。
9.进一步地,第二转动臂包括组成平行四边形支链的第一连接架、第二连接架、以及两根第一连杆,第一连接架与水平运动机构连接且具有两根水平平行的第一固定轴,第二连接架设置在第一连接架的上方且具有两根水平平行的第二固定轴,两根第一连杆平行地设置在竖直面上,并且两根第一连杆的一端分别与两根第一固定轴转动连接,另一端分别与两根第二固定轴转动连接;角度调整机构安装在第二连接架上。
10.在本发明提供的卧姿上肢康复机器人中,还可以具有这样的特征:升降机构包括伸缩杆,伸缩杆沿竖向设置且下端连接在水平运动机构上;角度调整机构安装在伸缩杆的上端。
11.在本发明提供的卧姿上肢康复机器人中,还可以具有这样的特征:角度调整机构包括第二转轴、第三转轴、以及臂托连接件,第二转轴转动连接在升降机构上,并可带动角度调整机构绕其轴线转动,第三转轴在第二转轴的轴向面和径向面上可绕第二转轴转动,臂托连接件与第三转轴连接且可绕第三转轴轴线转动。
12.进一步地,角度调整机构还包括两条第一uu支链、第二uu支链、以及转动连接件,两条第一uu支链、第二转轴、第三转轴连接并组成平行四边形支链,转动连接件与第二转轴连接,并且与第二uu支链的一端转动连接,臂托连接件分别与第三转轴和第二uu支链的另一端连接。
13.更进一步地,每条第一uu支链包括第二连杆以及分别安装在第二连杆两端的两个第一虎克铰,两条第一uu支链的第二连杆相平行,每个第一虎克铰包括轴线垂直相交的第一转动副和第二转动副,第一转动副与第二连杆连接,第二转动副与第二转轴或第三转轴连接;第二uu支链包括第三连杆以及分别安装在第三连杆两端的第二虎克铰和第三虎克铰,第三连杆平行于第二连杆,第二虎克铰包括轴线垂直相交的第三转动副和第四转动副,第三转动副与第三连杆连接,并且其轴线平行于第二转轴,第四转动副与转动连接件转动连接,第三虎克铰包括轴线垂直相交的第五转动副和第六转动副,第五转动副与第三连杆连接,并且其轴线与第三转动副的轴线异面垂直,第六转动副与臂托连接件连接,并且其轴线平行于第二转轴。
14.在本发明提供的卧姿上肢康复机器人中,还可以具有这样的特征:角度调节机构还包括臂托,臂托连接在臂托连接件上,用于固定上肢。
15.发明的作用与效果
16.根据本发明所涉及的卧姿上肢康复机器人,因为包括水平运动机构、升降机构以及角度调整机构,水平运动机构采用转动副或移动副的形式设计,能带动上肢实现水平运动,升降运动机构采用转动副或移动副的形式设计,能带动上肢实现升降运动,角度调整机构采用 3-uu支链的形式设计,能调整上肢的活动角度,在使用时,卧姿上肢康复机器人通过这三个机构组合运动带动卧姿状态下的偏瘫患者的患侧上肢在空间内进行运动,所以,本发明能提供卧姿状态下的上肢康复训练,满足了偏瘫患者在卧姿状态下进行针对性上肢训练的需求,填补了目前偏瘫患者卧床期间康复设备的断层,使偏瘫患者能得到积极有效的治疗。
附图说明
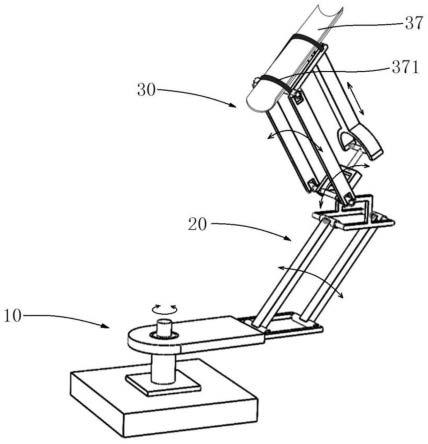
17.图1是本发明的实施例1中卧姿上肢康复机器人的整体结构示意图;
18.图2是本发明的实施例1中卧姿上肢康复机器人不含臂托的一位姿示意图;
19.图3是本发明的实施例1中卧姿上肢康复机器人不含臂托的另一位姿示意图;
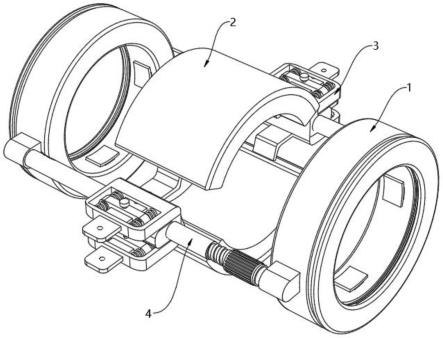
20.图4是本发明的实施例1中角度调整机构的结构示意图;
21.图5是本发明的实施例2中卧姿上肢康复机器人不含臂托的结构示意图。
22.附图标记说明:
23.10水平运动机构;11底座;12第一转轴;13第一转动臂;14x轴直线导轨;15y轴直线导轨;20升降机构;21第二转动臂;211第一连接架;2111第一固定轴;212第二连接架;2121 第二固定轴;213第一连杆;22伸缩杆;30角度调整机构;31第二转轴;32第三转轴;33 臂托连接件;34第一uu支链;341第二连杆;342第一虎克铰;3421第一转动副;3422第二转动副;35第二uu支链;351第三连杆;352第二虎克铰;3521第三转动副;3522第四转动副;353第三虎克铰;3531第五转动副;3532第六转动副;36转动连接件;37臂托; 371绑带。
具体实施方式
24.为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,以下实施例结合附图对本发明作具体阐述。
25.实施例1
26.图1是本实施例卧姿上肢康复机器人的结构示意图。
27.如图1所示,本实施例提供了一种卧姿上肢康复机器人,用于提供卧姿状态下的上肢康复训练,包括水平运动机构10、升降机构20、以及角度调整机构30。其中,水平运动机构 10用于带动上肢水平运动。升降机构20安装在水平运动机构10上,用于带动上肢升降运动。角度调整机构30安装在升降机构20上,用于调整上肢的角度。水平运动机构10、所述升降机构20、角度调整机构30通过组合运动带动上肢在空间内运动。
28.图2和图3是不含臂托37的卧姿上肢康复机器人的不同位姿示意图。
29.如图2和图3所示,水平运动机构10采用转动副的形式设计,包括底座11、第一转轴 12、以及第一转动臂13。第一转轴12沿竖向安装在底座11上,第一转轴12由一个独立设置的电机驱动可绕自身轴线转动。第一转动臂13的一端与第一转轴12连接,第一转动臂13 的另一端上安装升降机构20,第一转动臂13由第一转轴12带动进行水平转动,进而带动升降机构20水平转动。
30.如图2和图3所示,升降机构20采用转动副的形式设计,包括第二转动臂21,第二转动臂21的一端与第一转动臂13的另一端转动连接,第二转动臂21的另一端上安装角度调整机构30,第二转动臂21由一个独立设置的电机驱动可绕与第一转动臂13的转动连接处竖直转动,进而带动角度调整机构30进行竖直转动。
31.在本实施例中,第二转动臂21采用平行四边形支链的形式,包括第一连接架211、第二连接架212、以及两根第一连杆213。第一连接架211与第一转动臂13的另一端连接,第一连接架211具有两根水平平行的第一固定轴2111。第二连接架212设置在第一连接架211的上方,这里的“上方”包括正上方和斜上方,第二连接架212具有两根水平平行的第二固定轴2121,第二固定轴2121平行于第一固定轴2111。两根第一连杆213相平行地设置在一竖直面上,这两根第一连杆213的一端分别与两根第一固定轴2111转动连接,另一端分别与两根第二固定轴2121转动连接,每个转动连接处构成一个转动副,电机驱动其中任意一个转动
副,就能实现第二转动臂21的竖直转动。其中,第一固定轴2111、第二固定轴2121分别与第一转轴12异面垂直,并且两根第一连杆213所在竖直面经过第一转轴12的轴线设置,这样布置更加合理、实用。
32.图4是角度调整机构30的结构示意图。
33.图2至图4所示,角度调整机构30采用3-uu并联机构设计,包括第二转轴31、第三转轴32、臂托连接件33、两条第一uu支链34、第二uu支链35、以及转动连接件36。
34.第二转轴31转动连接在第二转动臂21的第二连接架212上且平行于第二转动臂21的第一固定轴2111、第二固定轴2121,第二转轴31由一个独立设置的电机驱动可绕自身轴线转动,进而能带动整个角度调整机构30绕其轴线转动。
35.第二转轴31、第三转轴32、两条第一uu支链34连接并组成平行四边形支链,使得第三转轴32在第二转轴31的轴向面和径向面上可绕第二转轴31转动。其中,每条第一uu支链34包括第二连杆341以及分别安装在第二连杆341两端的两个第一虎克铰342。两条第一 uu支链34的第二连杆341相平行,位于一端的两个第一虎克铰342分别与第二转轴31的两端连接,位于另一端的两个第一虎克铰342分别与第三转轴32的两端连接。如图4所示,每个第一虎克铰342包括轴线垂直相交的第一转动副3421和第二转动副3422,第一转动副 3421与所在第二连杆341的端部连接,第二转动副3422与第二转轴31的端部或第三转轴32 的端部连接。
36.第二uu支链35设置在第二转轴31、第三转轴32以及两条第一uu支链34组成的平行四边形支链的上方,第二uu支链35包括第三连杆351以及分别安装在第三连杆351两端的第二虎克铰352和第三虎克铰353。第三连杆351平行于第一uu支链34的第二连杆341。如图4所示,第二虎克铰352包括轴线垂直相交的第三转动副3521和第四转动副3522,第三转动副3521与第三连杆351的一端端部连接,并且其轴线平行于第二转轴31、第三转轴 32,第四转动副3522与转动连接件36转动连接。第三虎克铰353包括轴线垂直相交的第五转动副3531和第六转动副3532,第五转动副3531与第三连杆351的另一端端部连接,并且其轴线与第三转动副3521的轴线异面垂直,第六转动副3532与臂托连接件33连接,并且其轴线平行于第二转轴31、第三转轴32。
37.转动连接件36分别与第二转轴31和第二虎克铰352的第四转动副3522转动连接。在本实施例中,转动连接件36呈u形,转动连接件36的对应u形两端的部分与第二转轴31转动连接,使得转动连接件36可绕第二转轴31转动,转动连接件36的对应u形底部的部分与第二虎克铰352的第四转动副3522转动连接,使得第四转动副3522的轴线共面垂直于第二转轴31的轴线,并且第四转动副3522可相对于转动连接件36绕自身轴线转动。
38.臂托连接件33分别与第三转轴32和第三虎克铰353的第六转动副3532连接。在本实施例中,臂托连接件33呈u形,臂托连接件33的对应u形两端的部分与第三转轴32连接,使得臂托连接件33可与第三转轴32一同绕第三转轴32的轴线转动,臂托连接件33的对应 u形底部的部分与第三虎克铰353的第六转动副3532连接,使得臂托连接件33可绕第六转动副3532的轴线转动。
39.关于角度调整机构30的运动,运动方向见图1中非实心箭头方向所示:对于内部部件的运动,由于角度调整机构30采用3-uu并联机构设计,具有两个自由度,故采用两个电机驱动任意两个轴线相垂直的转动副即可,这里的“垂直”包括共面垂直和异面垂直,例如,两
个电机可以分别驱动同一个第一虎克铰342的第一转动副3421和第二转动副3422,可以分别驱动不同第一虎克铰342的第一转动副3421和第二转动副3422,可以分别驱动第二虎克铰352的第三转动副3521和第四转动副3522,可以分别驱动第一虎克铰342的第一转动副 3421和第二虎克铰352的第四转动副3522,等等,这里不作完全列举。对于角度调整机构 30整体的运动,采用独立设置的电机驱动第二转轴31,就能带动整个角度调整机构30绕第二转轴31的轴线转动。
40.如图1所示,角度调整机构30还包括臂托37,臂托37安装在臂托连接件33上,臂托 37具有用于托住上肢的托槽,臂托37上可设有用于固定上肢的绑带371。在实际安装臂托 37时,臂托37可与臂托连接件33转动连接,使臂托37有一定的转动范围,进而能更好地贴合上肢运动。
41.本卧姿上肢康复机器人的整体动作通过控制水平运动机构10、升降机构20、角度调整机构30中的电机实现,对于控制电机的控制装置和调节控制装置参数(或者说各个电机参数) 的控制软件,本技术不作限制,采用任意能满足功能需求的现有技术中的控制装置和控制软件即可。
42.本卧姿上肢康复机器人在使用时置于床侧,让卧姿状态下的偏瘫患者患侧的小臂或大臂固定在臂托37上,然后启动本卧姿上肢康复机器人,本卧姿上肢康复机器人能按照预先设置的训练路径和训练范围带动上肢运动。如此,本卧姿上肢康复机器人可以提供卧姿状态下的上肢康复训练,尤其是可以提供肩关节的大范围康复训练,符合偏瘫早期患者大部分时间都在卧床的实际情况,保证了康复训练的有效实施。
43.实施例2
44.图5是本实施例卧姿上肢康复机器人的结构示意图。
45.如图5所示,本实施例提供了一种卧姿上肢康复机器人,用于提供卧姿状态下的上肢康复训练,包括水平运动机构10、升降机构20、以及角度调整机构30,与实施例1的区别在于水平运动机构10和升降机构20。
46.水平运动机构10采用移动副的形式设计,包括x轴直线导轨14和y轴直线导轨15,x 轴直线导轨14和y轴直线导轨15分别采用独立设置的电机驱动,实现滑块的移动。升降机构20由x轴直线导轨14和y轴直线导轨15带动进行水平移动。x轴直线导轨14和y轴直线导轨15的数量可以根据实际需要调整,在本实施例中,x轴直线导轨14设计为一根,y 轴直线导轨15设计为两根,升降机构20安装在x轴直线导轨14的滑块上,x轴直线导轨 14的两端分别安装在两根y轴直线导轨15的滑块上。
47.升降机构20采用移动副的形式设计,包括伸缩杆22,伸缩杆22采用独立设置的电机驱动实现升降功能。在本实施例中,伸缩杆22的下端安装在x轴直线导轨14的滑块上,伸缩杆22的上端与角度调整机构30的第二转轴31转动连接。
48.角度调整机构30的结构和工作原理以及本实施例卧姿上肢康复机器人的使用过程参照实施例1,这里不再赘述。
49.此外,需要说明的是,升降机构20的伸缩杆22除了能实现升降功能外,根据需要,还可以设计其可以绕自身轴线转动,这样伸缩杆22能带动角度调整机构30水平转动,使得本卧姿上肢康复机器人能实现更灵活、更大范围的动作。
50.实施例的作用与效果
51.根据上述两个实施例所涉及的卧姿上肢康复机器人,因为包括水平运动机构、升降机构以及角度调整机构,水平运动机构采用转动副或移动副的形式设计,能带动上肢实现水平运动,升降运动机构采用转动副或移动副的形式设计,能带动上肢实现升降运动,角度调整机构采用3-uu支链的形式设计,能调整上肢的活动角度,在使用时,卧姿上肢康复机器人通过这三个机构组合运动带动卧姿状态下的偏瘫患者的患侧上肢在空间内进行运动,所以,本发明能提供卧姿状态下的上肢康复训练,满足了偏瘫患者在卧姿状态下进行针对性上肢训练的需求,填补了目前偏瘫患者卧床期间康复设备的断层,使偏瘫患者能得到积极有效的治疗。
52.采用转动副设计的水平运动机构可包括底座、第一转轴、以及第一转动臂,第一转动臂可绕第一转轴水平转动,进而能带动升降机构进行水平转动。采用移动副设计的水平运动机构可包括x轴直线导轨和y轴直线导轨,x轴直线导轨和y轴直线导轨能带动升降机构实现两个维度的水平移动。
53.采用转动副设计的升降机构可通过平行四边形支链形式的第二转动臂实现竖直转动。采用移动副设计的升降机构可通过伸缩杆实现竖向升降。
54.角度调整机构中主要实现角度调整功能的部件包括第二转轴、第三转轴、以及臂托连接件。第二转轴转动连接在升降机构上,第二转轴由电机驱动而能带动整个角度调整机构转动。第三转轴在第二转轴的轴向面和径向面上可绕第二转轴转动。臂托连接件与第三转轴连接且可绕第三转轴轴线转动。
55.角度调整机构还包括两条第一uu支链、第二uu支链、以及转动连接件。第三转轴通过两条第一uu支链与第二转轴组成平行四边形支链,从而实现在第二转轴的轴向面和径向面上可绕第二转轴转动。转动连接件、第二uu支链、臂托连接件的设置与平行四边形支链形成联动,实现臂托连接件可绕第三转轴轴线转动。其中,各条支链在实施例中都采用了较优的设置方式,使角度调整机构具备了灵活的位姿及较大的运动范围。
56.角度调整机构还包括臂托,能更好地支撑和固定上肢。
57.上述实施方式为本发明的优选案例,并不用来限制本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。