一种脑部穿刺路径精确规划方法及3d打印的穿刺定位装置
技术领域
1.本发明涉及医疗辅助类器械技术领域,尤其涉及一种3d打印脑部穿刺路径精确规划方法及穿刺定位装置。
背景技术:
2.脑部肿瘤压迫血管、神经、脑组织;脑部出血形成的颅内血肿造成颅内压增高,压迫脑组织进而造成神经损伤。脑部出血、积水、囊肿、肿瘤都严重影响人类的健康和生活,对人类造成巨大的医疗负担。脑部穿刺活检是诊断和治疗脑部肿瘤和颅内血肿的一种方法,具有手术风险低、创伤小、临床效果显著等优点。穿刺活检通过穿刺针取出一部分病变组织进行病理检查,通过病理检查诊断肿瘤。穿刺的精确度是穿刺手术的重要影响因素。
3.目前脑部穿刺技术分为两种:一是传统的脑部穿刺方法,外科医生通过ct扫描确定病灶和头皮进针点后,根据经验自行把握进针角度及深度。但对医生穿刺手术经验要求高;二是在立体定向、神经导航等设备辅助下进行穿刺。但设备昂贵,且会增加创面。
4.一种改进的颅内穿刺导向方法(201510507773.3),包括如下步骤:1)穿刺规划导航,1.1)加载头颅扫描图像序列,建立脑部三维模型,同时加载测量角度修正数据;1.2)设置基准点,在三维模型中建立相互垂直的基准参考平面;1.3)设置靶点和进入点,计算出靶点和进入点组成的穿刺路径的长度及其与基准参考平面之间的夹角;通过角度修正数据进行修正,得到最终计划穿刺角度和深度。
5.一种基于3d打印个性化的颅脑粒子植入导向系统(2017207405506),该发明为一种3d打印个性化颅脑粒子植入导向系统,包括头部固定真空垫、粒子植入计划软件、个性化版骨打孔模板、个性化粒子植入穿刺校板、3d建模模板制作和打印软件、3d打印机。本发明顽骨打孔模板与粒子植入穿刺模板配套使用,使每根粒子植入针体交叉点在颅骨打孔处,穿刺针顺利通过颅骨,模板的粒子植入针柱可以精确引导穿刺针的穿刺方向,避开血管和重要中枢神经,精准穿刺到病灶,减小手术难度,缩短手术时间,降低手术风险。具体实施方式如下:患者佩戴头部固定真空垫进行增强ct扫描,根据扫描结果计算穿刺针道;将ct图像导入3d建模软件并输入术前计划针道坐标信息,重建出个性化植入穿刺模板和与之配套使用的个性化颅骨打孔模板;3d打印出模板;低温等离子消毒,手术中将个性化精确颅骨打孔模板的定位孔对准头皮对应的标记点,准确复位模板,在骨钻引导柱对应的头皮处局部麻醉头皮并切开,骨钻插入骨钴引导柱中精确颅骨打孔,打孔后麻醉硬脑膜,更换粒子植入穿刺模板,定位孔对准头皮标记点准确复位模板,将粒子植入针插入到粒子植入针柱,按照术前计划插入到颅内肿瘤中,到达位置后植入粒子,取出粒子植入针,更换植入针插入到另一个设计针道,重复上述操作直到全部植入。
6.中国专利公开号为cn105054999a所公开的一种改进的颅内穿刺导向方法,包括如下步骤:1)穿刺规划导航,1.1)加载头颅扫描图像序列,建立脑部三维模型,同时加载测量角度修正数据;1.2)设置基准点,在三维模型中建立相互垂直的基准参考平面;1.3)设置靶点和进入点,计算出靶点和进入点组成的穿刺路径的长度及其与基准参考平面之间的夹
角;通过角度修正数据进行修正,得到最终计划穿刺角度和深度。其虽提供一种通过补偿头颅坐标系与地面坐标系间的角度差完成两个坐标系的匹配、实施简单、便于操作的改进的颅内穿刺导向方法及装置,但仍需要陀螺仪辅助操作,步骤较为繁杂。
7.中国专利公开号为cn207804782u公开了一种基于3d打印个性化的颅脑粒子植入导向系统(2017207405506),该发明为一种3d打印个性化颅脑粒子植入导向系统,包括头部固定真空垫、粒子植入计划软件、个性化版骨打孔模板、个性化粒子植入穿刺校板、3d建模模板制作和打印软件、3d打印机。本发明顽骨打孔模板与粒子植入穿刺模板配套使用,使每根粒子植入针体交叉点在颅骨打孔处,穿刺针顺利通过颅骨,模板的粒子植入针柱可以精确引导穿刺针的穿刺方向,避开血管和重要中枢神经,精准穿刺到病灶,减小手术难度,缩短手术时间,降低手术风险。具体实施方式如下:患者佩戴头部固定真空垫进行增强ct扫描,根据扫描结果计算穿刺针道;将ct图像导入3d建模软件并输入术前计划针道坐标信息,重建出个性化植入穿刺模板和与之配套使用的个性化颅骨打孔模板;3d打印出模板;低温等离子消毒,手术中将个性化精确颅骨打孔模板的定位孔对准头皮对应的标记点,准确复位模板,在骨钻引导柱对应的头皮处局部麻醉头皮并切开,骨钻插入骨钴引导柱中精确颅骨打孔,打孔后麻醉硬脑膜,更换粒子植入穿刺模板,定位孔对准头皮标记点准确复位模板,将粒子植入针插入到粒子植入针柱,按照术前计划插入到颅内肿瘤中,到达位置后植入粒子,取出粒子植入针,更换植入针插入到另一个设计针道,重复上述操作直到全部植入。其不同模板之间的替换依靠头皮标记点及模板上的定位孔进行定位以便复位模板,然而,头皮活动度较大,头皮上标记点容易发生移位,多个模板之间多次复位,难以保证个性化颅骨打孔模板与前一步骤的头部固定真空垫处于同一位置。同时,多次更换模板难以保证各个模板在头皮上固定的稳定度;ct扫描后需要打印三个模板,耗时较长,且需要多次替换复位模板,操作复杂;3d建模软件操作复杂;粒子植入针柱缺乏植入深度信息指示。
8.中国专利公开号为cn111195148a提供了一种简易脑部穿刺手术定位支架、设计辅助支架及方法,包括第一支架、高度测量器、固定设置于所述第一支架下方的形成等边三角形关系的三个第一圆柱体,所述高度测量器垂直固定设置于所述第一支架上且测量端可伸出底部,所述高度测量器的设置位置对应所述三个圆柱体的重心位置。首先ct扫描确定患者头皮的进针点;将设计辅助支架固定放置于所述患者头部,并使所述高度测量器垂直于所述进针点;旋转所述高度测量器测量所述第一支架与所述患者头皮的高度差;再对所述患者头部的位置进行第二次ct扫描;测量所述患者头部内的目标点与所述三个第一圆柱体之间的距离;计算所述目标点与所述进针点之间的连线在设定的三维空间中的空间角度;以所述第一支架、三个第一圆柱体位置关系重新设计位置关系一致的第二支架与三个第二圆柱体,并于所述第二支架上设计与所述空间角度一致且与所述目标点与所述进针点之间连线重合的进针管。其中限制为等边三角形,在某些特殊体表位置可能存在固定不稳定的问题;影像特征点非体表特征点,医生难以辨别定位;要求两次ct扫描,不仅增加患者经济压力,而且延长了手术时间可能耽误最佳治疗时机;唯一特定角度的进针管难以实现多种穿刺路径的选择。
技术实现要素:
9.本发明实施例所要解决的技术问题在于,提供一种脑部穿刺路径精确规划方法及
3d打印的穿刺定位装置,无需额外仪器辅助测量,简化操作步骤,3d打印方便装置制作,3d打印材料成本低、环保,降低脑部穿刺成本,提高穿刺定位精确度,可用于解决脑部穿刺缺乏相应辅助器械的问题,达到穿刺路径的可视化和精准化。
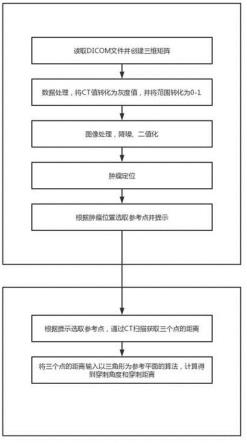
10.为了解决上述技术问题,本发明实施例提供了一种脑部穿刺路径精确规划方法,包括以下步骤:s1:输入ct图像序列,并创建三维矩阵;s2:扫描所述三维矩阵并定位脑部肿瘤的位置;s3:根据肿瘤位置选取三个特征点并提示;s4:根据所述三个特征点形成三角形参考平面并建立空间直角坐标系;s5:寻找特征点与靶点的关系,通过直线与平面距离建立数学关系,计算穿刺角度、穿刺距离,形成穿刺路径。
11.其中,所述s1还包括以下步骤:s11:获取所述三维矩阵的其中一个平面;s12:使用降噪、二值化排除无效信息的处理步骤对所述平面的对应的二维矩阵进行处理;s13:将处理后的二维矩阵更新所述三维矩阵;s14:重复上述步骤直到所述三维矩阵中所有二维平面均处理完毕。
12.其中,所述s2还包括以下步骤:为扫描检测脑部肿瘤创建3*3*3检测矩阵,根据肿瘤特征设置阈值,历遍三维矩阵进行扫描,当符合阈值时停止扫描并返回肿瘤坐标。
13.其中,所述s3还包括以下步骤:s31:预先获取ct序列中中间的ct图像;s32:对所述ct图像进行二值化处理,获取脑部图像上下边缘;s33:根据灰度值特点,进行脑部图像上下边缘检索,获得上边缘凸点所在行数记为top,下边缘凸点所在行数记为bollow;s34:判断获得的肿瘤坐标位于脑部前半部分或是后半部分。
14.其中,所述s34还包括以下步骤:肿瘤行坐标row在上边缘凸点所在行数top与中间行数(x-bollow top)/2范围内,判断为肿瘤位于脑部前半部分;肿瘤行坐标row在中间行数(x-bollow top)/2)与下边缘凸点所在行数bollow范围内,判断为肿瘤位于脑部后半部分;若在脑部前半部分,选取两侧耳洞和一侧眉骨作为特征点;若在脑部后半部分,选取两侧耳洞和第七颈椎作为特征点。
15.其中,所述s5还包括步骤:预先通过dicom软件三维重建并获取肿瘤与入针点、三个特征点间的距离,计算入穿刺角度的垂直旋转角、水平旋转角,形成穿刺路径。
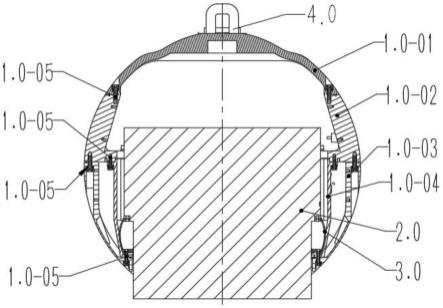
16.相应地,本发明实施例还提供了一种3d打印的脑部穿刺定位装置,包括支撑框架、半圆挂式固定部件、挂耳式固定部件、穿刺引导管,所述半圆挂式固定部件设置于所述支撑框架的其中一个面的内侧,所述支撑框架的顶面或相临所述半圆挂式固定部件的侧面设置有参考平面板,所述穿刺引导管以上述所得的穿刺角度设置于所述参考平面板上,所述挂
耳式固定部件设置于所述半圆挂式固定部件的两个端部,用于与耳部连接。
17.其中,所述支撑框架于所述半圆挂式固定部件对向的下边上设置有眉骨吻合滑块。
18.实施本发明实施例,具有如下有益效果:本发明只需进行一次ct扫描获取所需数据对ct序列进行分析形成穿刺路径,无需其他装置辅助测量;辅助穿刺设备穿戴便捷,不影响医生操作,不会产生额外创面,设备成本低,本发明通过软件实现算法辅助计算,实现穿刺路径可视化和精准化,辅助穿刺设备穿戴简便,便于医生穿刺操作,且可根据医生和患者的需求进行调整,减轻患者医疗负担。
附图说明
19.图1表示本发明方法实现流程图;图2表示本发明以特征点为三角形参考平面自动生成穿刺路径算法中的空间直角坐标系图解;图3是本发明的脑部穿刺定位装置的简化结构示意图;图4是脑部穿刺定位装置的结构示意图;图5是脑部穿刺定位装置另一结构示意图。
具体实施方式
20.为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作进一步地详细描述。
21.如图1所示,本发明实施例的一种脑部穿刺路径精确规划方法,可以解决多种问题,比如脑部出血、积水、囊肿、肿瘤;以脑部肿瘤为例,通过以下步骤进行实施。
22.s1:病灶定位并智能选取特征点算法:通过matlab实现输入ct图像序列后创建三维矩阵,扫描定位脑部肿瘤位置,并且根据脑部肿瘤位置自动选取三个特征点并提示。
23.具体通过下述步骤进行:s1.1读取ct序列并创建三维矩阵;s1.2数据处理,将ct值转化为灰度值;s1.3图像进行降噪、二值化、排除无效信息处理;s1.4对三维灰度矩阵进行扫描,定位肿瘤;s1.5根据肿瘤位置自动选取三个特征点并提示。
24.其中,s1.1通过以下步骤进行:s1.1.1读取单个dicom文件:ct1=dicomread('文件名');s1.1.2为进行三维矩阵的创建,重复上述步骤至完成ct序列读取得到ct2、......、ctn;s1.1.3创建三维矩阵:三维矩阵=cat(3,ct1,ct2,......,ctn)。
25.s1.2通过以下步骤进行:s1.2.1预先读取ct数据元素:ctdata=dicominfo('文件名');s1.2.2获取缩放截距:
缩放截距=ctdata.rescaleintercept;s1.2.3预先获取缩放斜度:缩放斜度=ctdata.rescaleslope;s1.2.4根据公式将ct值转为灰度值(pixelvalue):(公式:hu=pixelvalue*rescaleslope rescaleintercept;)注:(公式:ct值=灰度值*缩放斜坡 缩放截距;)三维矩阵(灰度值)=(三维矩阵(ct值)-缩放截距)/缩放斜度;s1.2.5预先将灰度值范围转化成0-1:最大灰度值=max(max(max(三维矩阵)));最小灰度值=min(min(min(三维矩阵)));三维矩阵=(原三维矩阵-最小灰度值)/(最大灰度值-最小灰度值)s1.3通过以下步骤进行:s1.3.1预先获取三维矩阵的第一个平面:二维矩阵=三维矩阵(:,:,1);s1.3.2为排除图像噪点,避免噪点对肿瘤检测造成干扰,通过均值滤波器对数据进行降噪:滤波掩膜=fspecial('average',3);二维矩阵=imfilter(原二维矩阵,滤波掩膜,'replicate');s1.3.3预先将图像二值化,获取脑部轮廓:二值化二维矩阵=imbinarize(二维矩阵);s1.3.4预先进行填充图像,获取脑部主体:填充后二维矩阵=imfill(二值化二维矩阵,'holes');s1.3.5为将脑部主体外无效信息进行排除,避免影响扫描三维矩阵并定位肿瘤,预先排除无效信息:二维矩阵(填充后二维矩阵==0)=1;s1.3.6为更新数据,二维矩阵处理后需重新输入三维矩阵,将处理后的二维矩阵输入三维矩阵:原三维矩阵(:,:,i)=新二维矩阵;s1.3.7重复s1.3.1—s1.3.6步骤直至三维矩阵中所有二维平面均处理完毕。
26.s1.4通过以下步骤进行:s1.4.1为进行步骤s1.4.2对三维矩阵进行历遍扫描,需要预先获取三维矩阵大小数据进行历遍操作:[行,列,层]=size(三维矩阵);s1.4.2为扫描检测脑部肿瘤创建3*3*3检测矩阵,根据肿瘤特征设置阈值,历遍三维矩阵进行扫描,当符合阈值时停止扫描并返回肿瘤坐标。
[0027]
s1.4.3对于s1.4.2步骤中设置阈值时,阈值根据不同肿瘤类型的特征而改变;如血肿,ct值范围一般为60-90,根据s1.2.1-s1.2.5步骤计算得灰度值(0-1范围)为0.515-0.5225,所以检测阈值设置为0.515-0.5225;(脑部平均ct值一般为30-40,灰度值(0-1范围)为0.5075-0.51)。
[0028]
s1.5通过以下步骤进行:s1.5.1为进行步骤s1.5.5对肿瘤位置属于脑部前半部分或是脑部后半部分的判断,需要预先获取ct序列中中间的ct图像,即三维矩阵中第1/2层:中间层二维矩阵=ct_3dmatrix(:,:,z/2);(z为总层数);
s1.5.2二值化处理,方便获取脑部图像上下边缘(上边缘位于额骨,下边缘位于枕骨);s1.5.3脑部轮廓灰度值为1,根据灰度值特点,进行脑部图像上下边缘检索,获得上边缘凸点所在行数记为top,下边缘凸点所在行数记为bollow,方便步骤s1.5.5对肿瘤位置的判断;s1.5.4为选取三个特征点,判断步骤s1.4.3中获得的肿瘤坐标位于脑部前半部分或是后半部分;s1.5.5步骤s1.5.4判断方法:通过肿瘤行坐标与二维图像上下边缘凸点所在行和中间行数的关系进行判断;肿瘤行坐标row在上边缘凸点所在行数top与中间行数(x-bollow top)/2范围内,即肿瘤位于脑部前半部分;(公式:row》top&row《(x-bollow top)/2);肿瘤行坐标row在中间行数(x-bollow top)/2)与下边缘凸点所在行数bollow范围内,即肿瘤位于脑部后半部分;(公式:row《bollow&row》(x-bollow top)/2);其中x为二维矩阵行数;s1.5.6若在脑部前半部分,即返回“肿瘤位于脑部前半部分,选取两侧耳洞和一侧眉骨作为特征点”;s1.5.7若在脑部后半部分,即返回“肿瘤位于脑部后半部分,选取两侧耳洞和第七颈椎作为特征点”。
[0029]
s2:根据特征点为三角形参考平面自动生成穿刺路径算法:根据所选取的三个特征点形成三角形参考平面建立空间直角坐标系,寻找特征点与靶点的关系,通过直线与平面距离建立数学关系,计算穿刺角度、穿刺距离,形成穿刺路径。
[0030]
步骤s2具体通过以下步骤进行实施。
[0031]
s2.1 根据提示选取特征点,通过ct扫描获取三个点的距离;s2.2 三个特征点作为三角形参考平面建立空间直角坐标系,通过三角函数、三角形面积建立数学关系,通过直线与平面角度关系建立数学关系计算得出穿刺角度,形成穿刺路径,具体方法步骤为s2.1.1-s2.2.11;步骤s2.1通过以下过程实施:s2.1.1 为计算穿刺路径的距离、垂直旋转角和水平旋转角,需要根据步骤s1.5.6-s1.5.7提示,预先通过dicom软件三维重建并获取肿瘤与入针点、三个特征点间的距离;s2.1.2 dicom软件为radiant dicom viewer。
[0032]
s2.2.1 为求得垂直旋转角(向量ef与三角形平面abc夹角θ)和水平旋转角(向量e’f’与y轴的夹角α)(参考图2),明确已知条件并结合图2进行合理设定:三角形abc为三个特征点,点a、b、c分别代表三角形abc参考平面的三个对应的顶点,以a为眉骨,b、c为两侧耳洞为例:设置e点为肿瘤点,e'为肿瘤点e在平面abc上的投影点。点f代表头皮进针点,点f’代表在三角形abc平面上的投影点,点e、f在同一条直线上。由影像重建过程中得到ab长度为n1,ac长度为n2,bc长度为n3;ea长度为a,eb长度为b,ec长度
为c;fa长度为a1,fb长度为b1,fc长度为c1,ef长度l。
[0033]
s2.2.2为建立数学关系,需要预先建立空间直角坐标系并对未知坐标点进行坐标设定:以点b为原点,作ee
’⊥
平面abc,ff
’⊥
平面abc,以,,为方向建立空间直角坐标系;设e点坐标为,设f点坐标为;已知ab长度为n1,ac长度为n2,bc长度为n3;ea长度为a,eb长度为b,ec长度为c;fa长度为a1,fb长度为b1,fc长度为c1;∴b(0,0,0)c(0,n3,0)a(-h,ya,0)s2.2.3为步骤s2.2.4求得ab、ac间正弦值,需要预先根据余弦定理求ab、ac余弦值:s2.2.4为步骤s2.2.5利用面积公式求a点在x轴上坐标h,需要预先根据三角函数求ab、ac求正弦值:s2.2.5为步骤s2.2.6利用勾股定理求a点在y轴上坐标,需要预先利用面积公式求a点在x轴上坐标h:a点在x轴上坐标h:∴。
[0034]
s2.2.6为求得点a坐标并建立步骤s2.2.7中方程组求得点e坐标,需要预先利用勾股定理求a点在y轴上坐标:yayayayas2.2.7 通过ef与三角形参考平面的夹角关系求得穿刺路径的垂直旋转角和水平
旋转角,需求e点坐标;为求得e点坐标:根据向量的模长计算公式可得=
┉┉┉┉┉①
=
┉┉┉┉┉┉┉②
=
┉┉┉┉┉┉③
联立式子
①
,
②
,
③
可得可得可得此时e点有两组解,用ef长度l确定其中一组解,即得es2.2.8 为求得f点坐标,根据步骤s2.2.7同理可求得f,其中:其中:其中:为求得穿刺路径距离,求得ef模长:s2.2.9 求垂直旋转角:与三角形平面abc夹角θ,平面abc法向量,通过直线与平面数学关系求得:通过直线与平面数学关系求得:通过直线与平面数学关系求得:通过直线与平面数学关系求得:通过直线与平面数学关系求得:s2.2.10 求水平旋转角:与y轴的夹角α,e在平面abc上投影e',f在平面abc上投影点f',通过直线与平面数学关系求得:
s2.2.11 步骤s2.2.9中获得的垂直旋转角、步骤s2.2.10中获得的水平旋转角为穿刺角度,结合步骤s2.1.1中通过ct扫描获得的肿瘤与入针点的距离,即可形成穿刺路径。
[0035]
本发明实施例还提供了一种3d打印的脑部穿刺定位装置,包括支撑框架、半圆挂式固定部件、挂耳式固定部件、穿刺引导管,如图3所示。
[0036]
支撑框架由多面体支架构成,包括了四条等长的位于竖直方向上的直边椭圆立体支架6、7、8、9,以及两条等长的位于底部左右边的直边椭圆立体支架13、14,以及位于顶面四边的螺栓形支架10、11。
[0037]
直边椭圆立体支架的两端带圆孔,直边椭圆立体支架为两端带圆孔且一端为u形结构。
[0038]
半圆挂式固定部件16设置于支撑框架的一侧上,支撑框架的顶面或相临所述半圆挂式固定部件的侧面设置有参考平面板1。
[0039]
当选取两侧耳洞和一侧眉骨作为特征点时,参考平面板1位于支撑框架的顶面。
[0040]
穿刺引导管以上述方法中所确定的穿刺角度设置于参考平面板上,挂耳式固定部件3设置于所述半圆挂式固定部件的两个端部,用于与耳部连接。
[0041]
挂耳式固定部件3通过螺栓与半圆挂式固定部件16的端部固定连接。入耳式固定部件4具有螺栓,通过螺帽配合固定于半圆挂式固定部件16的端部,用于置入耳道固定。
[0042]
作为另一种实施方式,挂耳式固定部件3、入耳式固定部件4的形状与人耳部形状匹配,并可与半圆挂式固定部件16通过3d打印一体成型。
[0043]
支撑框架于半圆挂式固定部件16对向的下边12上设置有眉骨吻合滑块15,用于与眉骨支撑配合固定本发明的支撑框架。
[0044]
参考平面板1为四角带圆孔的扁平长方体板,以便通过双头螺栓形支架将参考平面板固定于固定部件,对穿刺部件起到固定作用。
[0045]
挂耳式固定部件3具有可挂于耳部的弯部。
[0046]
形成3d打印文件时,需要确定穿刺引导管2与参考平面板1的位置关系,包括长度、角度与交点d的位置,以点坐标作为3d打印参数;因此,在图2建立的坐标系的基础上进行拓展说明;图3说明:a.平面abc、xby面、bcpq面为同一平面的不同说法;b.图2中以a为眉骨,b、c为两侧耳洞为例:以点b为原点,作ee
’⊥
平面abc,ff
’⊥
平面abc,以,,为方向建立空间直角坐标系;设置e点为肿瘤点,e'为肿瘤点e在平面abc上的投影点。点f代表头皮进针点,点f’代表在三角形abc平面上的投影点,点e、f在同一条直线上;c.参考平面b’c’p’q’平行于xby面,两平面间距离处处相等,投影为bcpq;穿刺引导管fg与参考平面b’c’p’q’相交于倾斜圆柱形孔,设其底面中心点为d;此时efdg共线,即
d、g在ef延长线上,其在xby面(bcpq面)投影为e’、f’、d’、g’;d.bb’为竖直方向上的两端带圆孔的直边椭圆立体支架,长度规定为h;根据c中参考平面b’c’p’q’平行于xby面,两平面间距离处处相等,即为bb’长度h;规定点g与参考平面b’c’p’q’距离为h;e.ee’、ff’、dd'、gg’相互平行、d
’’
为dd’上一点,使得fd
’’
平行于e’g’;计算:f.步骤2.2.1-2.2.10已求得a、b、c、e、f、e’、f’各点坐标、穿刺路径的垂直旋转角、水平旋转角;g.设d坐标为(、、),设d
’’
坐标为(、、),设g点坐标为(、、);dd
’’
垂直于xby面,所以 =、 =;根据e中fd
’’
平行于e’g’, =(步骤2.2.8中求得f在z轴上坐标);即d
’’
坐标为(、、);h.dd
’ꢀ
= bb
’ꢀ
= h, = h,可求得dd
’’ꢀ
= dd
’ꢀ‑ꢀ
d’d
’’ꢀ
=
ꢀꢀ‑ꢀ④
;i.在三角形fdd
’’
中,∠dfd
’’ꢀ
= ,由正切定理求得fd
’’ꢀ
= dd
’’ꢀ
/ tan
⑤
;j.根据勾股定理,fd
’’ꢀ
=
ꢀ⑥
;k.联立
④⑤⑥
式即可求得,即求得d坐标为(、、);l.根据步骤h、i、j、k同理可求得g点坐标为(、、);m.将所得d、f、g坐标作为参数形成3d打印文件,解决确定穿刺引导管2与参考平面板1的位置关系,包括长度、角度与交点d的位置的问题;其中通过d点坐标确定穿刺引导管2与参考平面板1的位置关系,穿刺引导管2的f端即为穿刺入针点,从而确定穿刺入针点与参考平面板1的位置关系;n.进行穿刺操作时,医生由g点通过穿刺引导管gf进行穿刺,f点为穿刺入针点;3d打印时将穿刺引导管2与参考平面板1固定为一体,解决穿刺引导管2与参考平面板1固定问题。
[0047]
以上所揭露的仅为本发明一种较佳实施例而已,当然不能以此来限定本发明之权利范围,因此依本发明权利要求所作的等同变化,仍属本发明所涵盖的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。