1.本发明涉及汽车驾驶技术领域,具体涉及一种汽车安全驾驶控制系统。
背景技术:
2.在汽车驾技术飞速发展的当下,各种型号的汽车逐渐出现在人们的视野中,并成为一种重要的交通工具,在满足人们出行便利的同时,随之而来的便是汽车在行驶过程中出现的安全问题,由于汽车数量的不断增加,汽车驾驶问题日益凸显。
3.驾驶人员在驾驶汽车时,可能会出现疲劳驾驶、拨打电话等存在安全隐患的驾驶方式;在倒车时,也会有发生碰撞障碍物的风险;当汽车行驶时,可能因为行驶不当而出现偏离车道线的情况,而当汽车发生偏离时则由碰撞其他车辆甚至行人的安全隐患;当汽车行驶至事故频发区段时,则有发生事故的风险。通常,这些情况只能通过人为来控制,但驾驶人员在驾驶汽车的过程中依旧存有极大的安全隐患。
技术实现要素:
4.本发明提供,以解决现有技术中存在的上述问题。
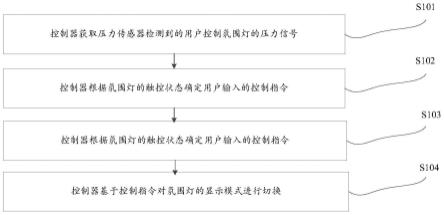
5.一种汽车安全驾驶控制系统,包括:
6.驾驶状态监测模块:通过采集驾驶员在行驶状态时的图像,判断驾驶员是否确认为危险驾驶;
7.盲区雷达监测模块:通过判断盲区障碍物与汽车的距离监测安全情况;
8.车道偏离控制模块:通过采集路况信息判断车辆行驶路线是否偏离;
9.数据记录监测模块:通过设定参数判断汽车是否为安全驾驶状态;
10.安全预警控制模块:通过在确认驾驶员为存在安全隐患的驾驶状态后对驾驶员进行语音播报提醒;
11.中央控制器:用于控制所述汽车安全驾驶控制系统中的所有模块。
12.进一步地,所述驾驶状态监测模块,包括:
13.图像采集器:在驾驶员座位的挡光板上方安装第一摄像头,用于捕捉驾驶员在行驶时的面部图像与手部图像为第一图像;在制动踏板上方安装第二摄像头,用于捕捉驾驶员在行驶时的脚部图像为第二图像;
14.图像匹配器:图像匹配器中包含驾驶人员的危险驾驶图像与脚部错误驾驶图像为第三图像,将所述第一图像、第二图像与图像匹配器进行匹配,若第一图像、第二图像与图像匹配器中的第三图像吻合度达到所设定的阈值,则判定为当前驾驶员的驾驶状态存在安全隐患。
15.进一步地,所述判定当前驾驶员的状态存在安全隐患,包括:
16.当根据所述图像匹配器的结果判定为驾驶员的驾驶状态存在安全隐患时,则由图像匹配器向所述中央控制器发送信号,中央控制根据发送信号判断当前行驶状况,并将判断结果传送给所述安全预警控制模块,安全预警控制模块收到判断结果后,在汽车车厢内
进行语音预警提示。
17.进一步地,所述盲区雷达监测模块,包括:
18.雷达感应器:用于使用超声波测量汽车与障碍物的距离,当汽车驶入狭窄区域内,雷达感应器自动进入工作状态,所述雷达感应器所感应到的范围为距离车身五米以内的距离;
19.后视感知器:用于识别汽车后方道路盲区所在的环境信息;
20.数字处理器:用于获取当前汽车行驶速度,以及车身与目标障碍物的距离,并预计所述目标障碍物与汽车碰撞时间。
21.进一步地,所述预计目标障碍物与汽车碰撞时间,包括:
22.决策控制器:通过所述数字处理器的处理结果,驱动决策控制器判断当前是否有发生碰撞的风险;
23.蜂鸣器:当所述决策控制器判定当前有发生碰撞的风险时,则立即启动蜂鸣器,对汽车发出蜂鸣警报;
24.所述决策控制器连接中央控制器,在汽车发出警报时,决策控制器向中央控制器发出信号,中央控制器收到信号后驱动安全预警控制模块在车厢内进行语音提示碰撞风险。
25.进一步地,所述车道偏离控制模块,包括:
26.前视感知摄像器:用于识别汽车在行驶时前方道路的车道线以及车辆的道路信息;
27.数据处理器:用于采集所述道路信息中汽车在正常行驶时距离车道线的距离,以及距离来往车辆和行人的距离,包括车体本身数据;
28.偏离预警器:所述偏离预警器连接中央控制器,若根据所述数据处理器的结果判定汽车在行驶过程中存在安全隐患,则通过偏离预警器向中央控制器发出信号,中央控制器收到信号后驱动安全预警控制模块在汽车内部进行语音播报,提示驾驶安全隐患。
29.进一步地,所述数据处理器,包括:
30.将所述前视感知摄像器采集到的道路信息形成动态图像,通过所述数据处理器提供的汽车行驶信息,在所述动态图像上形成一坐标轴,所述坐标轴的起点为当前汽车行驶所在位置,根据驾驶员的行驶方向,汽车在坐标轴中的位置不断发生变化,若汽车行驶过程中在所述坐标轴中发生偏离并且达到某一阈值时,则判定为存在安全隐患的驾驶。
31.进一步地,所述数据记录监测模块,包括:
32.数据记录单元:根据汽车的行驶状态记录汽车在行驶过程中的行驶数据;
33.预警等级单元:将所述行驶数据危险程度分为安全级与预警级,若行驶数据达到预警级,则发出预警信号,所述预警等级单元连接中央控制器,中央控制器通过预警等级单元发来的信号驱动安全预警控制模块发出语音提示。
34.优选地,一种汽车安全驾驶系统,还包括:
35.信息收集模块:用于收集汽车在行使过程中事故易发区段的信息,以及在所述事故易发区段的安全行驶车速范围;
36.车辆感应模块:用于感应汽车与所述事故易发区段的距离,当汽车在行驶过程中不断靠近事故易发区段并达到所设定距离时,判断当前汽车的车速是否在所述安全行驶车
速范围内;
37.自动变速器:用于自动控制汽车在所设定的速度内行驶。
38.进一步地,所述车速是否在所述安全行驶车速范围内,包括:
39.所述车辆感应模块连接中央控制器,当汽车行驶至所述事故易发频段时,车辆感应模块发出警示信号,中央控制器在收到信号后驱动安全预警控制模块发出语音播报;
40.在所述安全预警控制模块发出语音播报的同时,所述自动变速器控制汽车的车速保持在所述事故易发区段的安全行驶车速范围。
41.与现有技术相比,本发明具有以下优点:
42.本发明提供了一种汽车安全驾驶控制系统,通过驾驶状态监测模块,可以判断驾驶人员是否处于安全驾驶状态,盲区雷达监测模块,可以检测到汽车后视盲区是否有发生碰撞的风险,车道偏离控制模块可以判断汽车是否发生车道偏离,数据记录监测模块用来通过收集数据判断汽车在行驶过程中是否存在安全隐患,安全预警控制模块则在中央控制器的驱动下,对驾驶员发出语音提示,使驾驶员注意行车安全。
43.本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
44.下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
附图说明
45.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
46.图1为本发明实施例中一种汽车安全驾驶控制系统的模块图;
47.图2为本发明实施例中盲区雷达监测模块中的构造图;
48.图3为本发明实施例中数据记录监测模块中的数据图。
具体实施方式
49.以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
50.本发明实施例提供了一种汽车安全驾驶控制系统,包括:
51.驾驶状态监测模块:通过采集驾驶员在行驶状态时的图像,判断驾驶员是否确认为危险驾驶;
52.安全预警控制模块:通过在确认驾驶员为存在安全隐患的驾驶状态后对驾驶员进行语音播报;
53.中央控制器:用于控制所述汽车安全驾驶控制系统中的所有模块;
54.所述驾驶状态监测模块,包括:
55.图像采集器:在驾驶员座位的挡光板上方安装第一摄像头,用于捕捉驾驶员在行驶时的面部图像与手部图像为第一图像;在制动踏板上方安装第二摄像头,用于捕捉驾驶员在行驶时的脚部图像为第二图像。
56.图像匹配器:图像匹配器中包含驾驶人员的危险驾驶图像与脚部错误驾驶图像为
第三图像,将所述第一图像、第二图像与图像匹配器进行匹配,若第一图像、第二图像与图像匹配器中的第三图像吻合度达到所设定的阈值,则判定为当前驾驶员的驾驶状态存在安全隐患。
57.具体地,当根据所述图像匹配器的结果判定为驾驶员的驾驶状态存在安全隐患时,则由图像匹配器向所述中央控制器发送信号,中央控制根据发送信号判断当前行驶状况,并将判断结果传送给所述安全预警控制模块,安全预警控制模块收到判断结果后,在汽车车厢内进行语音预警提示驾驶员当前出现的状况,驾驶员根据语音提示进行驾驶状态调整。
58.上述技术方案的工作原理为:在驾驶员行驶的过程中,所述第一摄像头保持开启状态,并在每秒截取驾驶员的面部图像与手部图像为第一图像,所述匹配器中包含有图库,所述图库中存放若干张驾驶人员的疲劳驾驶与手机拨打电话的实例图像为第三图像,将所述第一图像与匹配器中的第三图像进行匹配,若匹配的重合程度大于所述阈值即80%时,则当前驾驶员存在驾驶安全隐患。
59.所述第二摄像头在驾驶员行驶过程中同样处于开启状态,并在每3秒截取驾驶员的脚部图像与手部图像为第二图像,所述第三图像中包含驾驶员的脚部位置错误图像,如同时踩制动踏板与油门踏板,将所述第二图像与匹配器中的第三图像进行匹配,若重合程度大于所述阈值即80%时,则当前驾驶员存在驾驶安全隐患。
60.所述重合程度大于阈值即80%,重合程度的计算基于一种提取特征点的图像匹配算法,根据特征空间中的图像匹配算法,以第一图像与匹配器中的第三图像进行匹配为例,从摄像头所拍摄的第一图像中提取可以用于图像匹配的特征信息,包括图像本身的特征和其它的变化形式,例如交叉点、边缘、轮廓、连通域、重心、高层结构等。在图像匹配时选择正确合理的特征空间有助于减少冗余因素、降低算法计算复杂度、提高图像匹配准确率等。将所述特征信息进行数字化处理,将所述数字化处理的数据结果在第一图像与匹配器中的第三图像形成特征点,采用邻近距离比值的方法进行特征点的匹配,即对第一图像中的每个特征点,在匹配器的第三图像中找出与第一图像最近距离的两个特征点,并使用汉明距离计算图像间的相似性度量,若最近距离与次最近距离的比值小于设定的阈值0.8时,则将所述距离最近的特征点作为匹配点。
61.上述技术方案的有益效果为:通过所述第一摄像头与第二摄像头截取到驾驶员的面部图像、手部图像与脚部图像,实时对驾驶员的状态进行监控,当驾驶员出现错误驾驶或者存在安全隐患的驾驶,可以通过安全预警控制模块及时提醒驾驶员当前驾驶状况,使驾驶员集中注意力,并且有效避免意外的发生。
62.在另一实施例中,参照图2,汽车安全驾驶系统还包括盲区雷达监测模块:通过判断盲区障碍物与汽车的距离监测安全情况。
63.具体地,所述盲区雷达监测模块包括:
64.雷达感应器:用于使用超声波测量汽车与障碍物的距离,当汽车驶入狭窄区域内,雷达感应器自动进入工作状态,所述雷达感应器所感应到的范围为距离车身五米以内的距离;
65.后视感知器:用于识别汽车后方道路盲区所在的环境信息;
66.数字处理器:用于获取当前汽车行驶速度,以及车身与目标障碍物的距离,并预计
所述目标障碍物与汽车碰撞时间。
67.具体地,所述预计目标障碍物与汽车碰撞时间,包括:
68.决策控制器:通过所述数字处理器的处理结果,驱动决策控制器判断当前是否有发生碰撞的风险;
69.蜂鸣器:当所述决策控制器判定当前有发生碰撞的风险时,则立即启动蜂鸣器,对汽车发出蜂鸣警报;
70.所述决策控制器连接中央控制器,在汽车发出警报时,决策控制器向中央控制器发出信号,中央控制器收到信号后驱动安全预警控制模块在车厢内进行语音提示碰撞风险。
71.上述技术方案的工作原理为:在汽车左后方与右后方分别装有雷达感应器用来检测汽车后方盲区状况,所述雷达感应器感应以车身的左后方或右后方为圆心半径为五米范围的盲区障碍物,所述后视感知器用来识别汽车后方的环境信息,并将识别到的图像显示在汽车内的图像显示屏上方便驾驶员观察。当汽车在倒车的过程中,或者后方有行驶车辆时,若范围到达五米之内,则通过所述数字处理器根据当前的行驶车速,与汽车和目标障碍物的距离计算汽车与目标障碍物预计发生碰撞的时间。所述目标障碍物为五米之内距离汽车直线距离最近的障碍物。当所述决策控制器判定当前处于危险状态时,则立即启动蜂鸣器,并由中央控制器驱动安全预警控制模块进行语音提示,驾驶员在收到提示后将根据提示调整车身状态。
72.由于在汽车行驶过程中,雷达感应器需在较短的范围内才能检测到盲区障碍物,而信号传输具有时延性,为了保证监测数据的准确性,需对数据进行时延效应计算,公式如下:
[0073][0074]
其中,wi是特定时延类型的信号接收功率,w
min
是系统所能提供的最小功率,xi是在特定时延类型的实际分配的时隙数量;xi是特定时延类型请求的时延数量,ri是特定时延类型的比例调节因子,i为雷达感应器监测从1m到5m内的范围,根据公式求得数据处理时延u,u的值越大,则说明数据时延消耗成本越大。
[0075]
上述技术方案的有益效果为:采用本实施例提供的方案,可以使驾驶员清晰的掌握汽车后方盲区所发生的状况,并根据所述数据处理器预估所发生碰撞的可能,通过语音碰撞提示的碰撞风险,可以使驾驶员有效的避免与障碍物或其他车辆发生碰撞,减少了事故的发生。
[0076]
在另一实施例中,汽车安全驾驶控制系统还包括车道偏离控制模块,包括:
[0077]
车道偏离控制模块:通过采集路况信息判断车辆行驶路线是否偏离;
[0078]
具体地,所述车道偏离控制模块,包括:
[0079]
前视感知摄像器:用于识别汽车在行驶时前方道路的车道线以及车辆的道路信息;
[0080]
数据处理器:用于采集所述道路信息中汽车在正常行驶时距离车道线的距离,以及距离来往车辆和行人的距离,包括车体本身数据;
[0081]
偏离预警器:所述偏离预警器连接中央控制器,若根据所述数据处理器的结果判定汽车在行驶过程中存在安全隐患,则通过偏离预警器向中央控制器发出信号,中央控制器收到信号后驱动安全预警控制模块在汽车内部进行语音播报,提示驾驶安全隐患。
[0082]
具体地,所述数据处理器,包括:将所述前视感知摄像器采集到的道路信息形成动态图像,通过所述数据处理器提供的汽车行驶信息,在所述动态图像上形成一坐标轴,所述坐标轴的起点为当前汽车行驶所在位置,根据驾驶员的行驶方向,汽车在坐标轴中的位置不断发生变化,若汽车行驶过程中在所述坐标轴中发生偏离并且达到某一阈值时,则判定为存在安全隐患的驾驶。
[0083]
上述技术方案的工作原理为:本实施例采用的方案是通过所述前视感应摄像器采集前方行驶道路信息,所述数据处理器采集汽车距离道路信息中如车道线、来往车辆以及行人的距离,根据所述前方行驶道路信息在以当前汽车行驶的位置建立一动态动图,图像中包含一xy坐标轴,y轴为汽车前进的方向,x轴为与汽车前进垂直的横向坐标轴,所述xy坐标轴以每20厘米为一个单位,汽车为xy坐标轴的中心点,车道线、车辆道路信息以及行人为坐标轴中的若干分散点,分别计算所述中心点与若干分散点中车道线、车辆、行人的距离与角度判断当前汽车在车道线内的行驶过程中是否发生偏离,并且是否有碰撞行人的可能,当汽车行驶未在由车道线构成的分散线正中央时,则向所述偏离预警器发出信号,当汽车距离其他车辆分散点的直线距离为50cm时,或距离行人的分散点直线距离为1m时,则向偏离预警器发出信号。
[0084]
上述技术方案的有益效果为:采用本实施例提供的方案可以准确监测到驾驶员的驾驶状态,通过所述前视感知摄像器与数据处理器收集到的数据信息形成的坐标轴,可以直观的预测当前汽车在行驶过程中是否会发生车道偏离、汽车碰撞以及行人碰撞的事故发生,通过偏离预警器发出的信号传送至中央控制器并驱动安全预警控制模块在车厢内进行语音提示,可以有效的防止驾驶员由于驾驶不当产生可能发生事故。
[0085]
在另一实施例中,参照图3,汽车安全驾驶控制系统,还包括:
[0086]
数据记录监测模块:通过设定参数判断汽车是否为安全驾驶状态。
[0087]
具体地,所述数据记录监测模块,包括:
[0088]
数据记录单元:根据汽车的行驶状态记录汽车在行驶过程中的行驶数据;
[0089]
预警等级单元:将所述行驶数据根据危险程度分为安全级与预警级,若行驶数据达到预警级,则发出预警信号,所述预警等级单元连接中央控制器,中央控制器通过预警等级单元发来的信号驱动安全预警控制模块发出语音提示。
[0090]
上述技术方案的工作原理为:本实施例采用的方案是通过所述数据记录单元记录汽车在行车过程中的数据,以汽车在制动时产生的数据为例,在某一行驶距离范围内,收集汽车制动时的加减速度、制动时汽车距离前车的距离、制动时汽车与前车的车速。通过收集上述数据,安全预警控制模块可根据当前数据情况语音推荐当前汽车可以保持的车速。
[0091]
根据汽车行驶数据之间的关系的得出推荐车速,公式如下:
[0092][0093]
其中,记录汽车在设定100米范围内的平均车速vc,v
front
是当前汽车前车的平均车
速,然后引入在设定范围行车时间内指数分布函数f(ax),设定当前汽车速度的波动周期为tc,δtc为所述波动周期的变化,前车速度波动周期为t
front
,m1为前车波动周期与当前汽车波动周期变化的比值,m2为当前汽车平均车速与当前汽车波动周期变化的比值,计算波动周期的权重分配因子之和,l为距离前车的距离,a为当前车辆制动时的减速度,得出的计算结果为推荐当前车辆的行驶速度即v
des
(t)。
[0094]
上述技术方案的有益效果为:采用本实施例提供的方案,根据数据记录监测模块,可以记录汽车在行驶时的各种数据,通过所述参数的计算,防止汽车在行驶过程中发生意外情况,并提醒驾驶员及时采取错处,避免了事故发生。
[0095]
在另一实施例中,汽车安全驾驶控制系统,还包括:
[0096]
信息收集模块:用于收集汽车在行使过程中事故易发区段的信息,以及在所述事故易发区段的安全行驶车速范围;
[0097]
车辆感应模块:用于感应汽车与所述事故易发区段的距离,当汽车在行驶过程中不断靠近事故易发区段并达到所设定距离时,判断当前汽车的车速是否在所述安全行驶车速范围内;
[0098]
自动变速器:用于自动控制汽车在所设定的速度内行驶。
[0099]
具体地,所述车速是否在所述安全行驶车速范围内,包括:
[0100]
所述车辆感应模块连接中央控制器,当汽车行驶至所述事故易发频段时,车辆感应模块发出警示信号,中央控制器在收到信号后驱动安全预警控制模块发出语音播报;
[0101]
在所述安全预警控制模块发出语音播报的同时,所述自动变速器控制汽车的车速保持在所述事故易发区段的安全行驶车速范围。
[0102]
上述技术方案的工作原理为:本实施例采用的方案是,通过信息收集模块收集当前汽车在行驶过程中事故易发区段的信息,例如,当汽车行驶至某一区域时,信息收集模块收集当前100米内包含有警示信息的道路标识,当车辆感应模块感应到汽车驶入事故易发区段的区域时,对汽车车速进行判断,如,在事故多发路段,汽车车速应在不超过60公里每小时,若车辆感应模块感应到汽车车速超过所设定的阈值,判定当前行驶为等级为预警级,则驱动自动变速器自动控制汽车在所设定的速度内行驶,当汽车驶出事故易发区段的范围内,自动变速器不再自动控制汽车速度,汽车保持当前车速。
[0103]
上述技术方案的有益效果为:采用本实施例提供的方案,车辆感应模块感应事故多发区段,并通过自动变速器使汽车自动降速,若当前驾驶员处于疲劳驾驶状态,难以控制车速,则可以有效防止驾驶员出现事故,通过中央控制器驱动安全预警控制模块发出语音播报提醒驾驶员,避免事故的发生。
[0104]
显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。