技术特征:
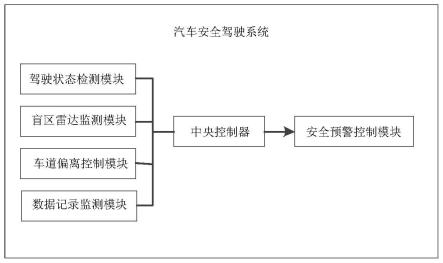
1.一种汽车安全驾驶控制系统,其特征在于,包括:驾驶状态监测模块:通过采集驾驶员在行驶状态时的图像,判断驾驶员是否确认为危险驾驶;盲区雷达监测模块:通过判断盲区障碍物与汽车的距离监测安全情况;车道偏离控制模块:通过采集路况信息判断车辆行驶路线是否偏离;数据记录监测模块:通过设定参数判断汽车是否为安全驾驶状态;安全预警控制模块:通过在确认驾驶员为存在安全隐患的驾驶状态后对驾驶员进行语音播报提醒;中央控制器:用于控制所述汽车安全驾驶控制系统中的所有模块。2.根据权利要求1所述的一种汽车安全驾驶控制系统,其特征在于,所述驾驶状态监测模块,包括:图像采集器:在驾驶员座位的挡光板上方安装第一摄像头,用于捕捉驾驶员在行驶时的面部图像与手部图像为第一图像;在制动踏板上方安装第二摄像头,用于捕捉驾驶员在行驶时的脚部图像为第二图像;图像匹配器:图像匹配器中包含驾驶人员的危险驾驶图像与脚部错误驾驶图像为第三图像,将所述第一图像、第二图像与图像匹配器进行匹配,若第一图像、第二图像与图像匹配器中的第三图像吻合度达到所设定的阈值,则判定为当前驾驶员的驾驶状态存在安全隐患。3.根据权利要求2所述的一种汽车安全驾驶控制系统,其特征在于,所述判定当前驾驶员的状态存在安全隐患,包括:当根据所述图像匹配器的结果判定为驾驶员的驾驶状态存在安全隐患时,则由图像匹配器向所述中央控制器发送信号,中央控制器根据发送信号判断当前行驶状况,并将判断结果传送给所述安全预警控制模块,安全预警控制模块收到判断结果后,在汽车车厢内进行语音预警提示。4.根据权利要求1所述的一种汽车安全驾驶控制系统,其特征在于,所述盲区雷达监测模块,包括:雷达感应器:用于使用超声波测量汽车与障碍物的距离,当汽车驶入狭窄区域内,雷达感应器自动进入工作状态,所述雷达感应器所感应到的范围为距离车身五米以内的距离;后视感知器:用于识别汽车后方道路盲区所在的环境信息;数字处理器:用于获取当前汽车行驶速度,以及车身与目标障碍物的距离,并预计所述目标障碍物与汽车碰撞时间。5.根据权利要求4所述的一种汽车安全驾驶系统,其特征在于,所述预计目标障碍物与汽车碰撞时间,包括:决策控制器:通过所述数字处理器的处理结果,驱动决策控制器判断当前是否有发生碰撞的风险;蜂鸣器:当所述决策控制器判定当前有发生碰撞的风险时,则立即启动蜂鸣器,对汽车发出蜂鸣警报;所述决策控制器连接中央控制器,在汽车发出警报时,决策控制器向中央控制器发出信号,中央控制器收到信号后驱动安全预警控制模块在车厢内进行语音提示碰撞风险。
6.根据权利要求1所述的一种汽车安全驾驶系统,其特征在于,所述车道偏离控制模块,包括:前视感知摄像器:用于识别汽车在行驶时前方道路的车道线以及车辆的道路信息;数据处理器:用于采集所述道路信息中汽车在正常行驶时距离车道线的距离,以及距离来往车辆和行人的距离,包括车体本身数据;偏离预警器:所述偏离预警器连接中央控制器,若根据所述数据处理器的结果判定汽车在行驶过程中存在安全隐患,则通过偏离预警器向中央控制器发出信号,中央控制器收到信号后驱动安全预警控制模块在汽车内部进行语音播报,提示驾驶安全隐患。7.根据权利要求6所述的一种汽车安全驾驶系统,其特征在于,所述数据处理器,包括:将所述前视感知摄像器采集到的道路信息形成动态图像,通过所述数据处理器提供的汽车行驶信息,在所述动态图像上形成一坐标轴,所述坐标轴的起点为当前汽车行驶所在位置,根据驾驶员的行驶方向,汽车在坐标轴中的位置不断发生变化,若汽车行驶过程中在所述坐标轴中发生偏离并且达到某一阈值时,则判定为存在安全隐患的驾驶。8.根据权利要求1所述的一种汽车安全驾驶系统,其特征在于,所述数据记录监测模块,包括:数据记录单元:根据汽车的行驶状态记录汽车在行驶过程中的行驶数据;预警等级单元:将所述行驶数据危险程度分为安全级与预警级,若行驶数据达到预警级,则发出预警信号,所述预警等级单元连接中央控制器,中央控制器通过预警等级单元发来的信号驱动安全预警控制模块发出语音提示。9.根据权利要求1所述的一种汽车安全驾驶系统,其特征在于,还包括:信息收集模块:用于收集汽车在行使过程中事故易发区段的信息,以及在所述事故易发区段的安全行驶车速范围;车辆感应模块:用于感应汽车与所述事故易发区段的距离,当汽车在行驶过程中不断靠近事故易发区段并达到所设定距离时,判断当前汽车的车速是否在所述安全行驶车速范围内;自动变速器:用于自动控制汽车在所设定的速度内行驶。10.根据权利要求9所述的一种汽车安全驾驶系统,其特征在于,所述车速是否在所述安全行驶车速范围内,包括:所述车辆感应模块连接中央控制器,当汽车行驶至所述事故易发频段时,车辆感应模块发出警示信号,中央控制器在收到信号后驱动安全预警控制模块发出语音播报;在所述安全预警控制模块发出语音播报的同时,所述自动变速器控制汽车的车速保持在所述事故易发区段的安全行驶车速范围。
技术总结
本发明公开了一种汽车安全驾驶系统,包括驾驶状态监测模块:采集驾驶员在行驶状态时的图像并判断是否为危险驾驶;盲区雷达监测模块:判断盲区障碍物与汽车的距离是否存在安全隐患;车道偏离控制模块:采集路况信息判断车辆行驶路线是否偏离;数据记录监测模块:设定参数判断汽车是否为安全驾驶状态;安全预警控制模块:在确认驾驶员为存在安全隐患的驾驶状态后对驾驶员进行语音播报提醒;中央控制器:用于控制所述汽车安全驾驶控制系统中的所有模块。通过汽车安全驾驶系统,使驾驶员在行驶过程中实时感受到可能存在的安全隐患,并及时避免,保证行车安全。保证行车安全。保证行车安全。
技术研发人员:兰云港 肖满成 凡金海 梁建忠
受保护的技术使用者:深圳市昊岳科技有限公司
技术研发日:2022.09.22
技术公布日:2022/11/22
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。