1.本发明涉及压缩机焊接防护技术领域,具体涉及一种可变内径式焊渣防护机构及焊渣防护方法。
背景技术:
2.空调压缩机生产环焊工序中,因焊接过程中产生焊渣溅落压缩机表面,冷却后形成固体颗粒,对压缩机后工序的外观、装配质量及人员操作安全都有一定影响。
3.为此,现有技术中在焊接时会采用固定式护罩进行防护。现有的固定式护罩为一体式结构不可调节,其中部开有对压缩机让位的安装孔,为了保证护罩能够顺利移入移出压缩机,避免干涉,安装孔的尺寸需要大于压缩机外壁的尺寸,这样的设计,使得护罩套装在压缩机上后,其安装孔与压缩机外壁之间具有减小,间隙对飞溅焊渣防护不足,焊接时仍会存在焊渣经间隙飞溅至压缩机表面的情况。
技术实现要素:
4.本发明的目的是针对以上不足之处,提供了一种可变内径式焊渣防护机构及焊渣防护方法。
5.本发明解决技术问题所采用的一个技术方案是,一种可变内径式焊渣防护机构,包括挡板,挡板中部设有对压缩机进行让位的内孔,所述挡板以内孔轴线为中心圆周等分为至少两块单元板,单元板两端部分别经连接件与相邻的单元板的相邻端相连接;
6.所述连接件至少一端与其所连接的单元板的位置固定;
7.各个单元板处于内极限位置时,相邻的单元板的端部贴合,各个单元板内端围成内孔,且内孔壁与压缩机外周定位面相贴合,内孔壁与压缩机外周定位面的形状相适配;
8.各个单元板不处于内极限位置时,相邻的单元板的之间形成间隙。
9.进一步的,所述连接件两端的间距不随单元板的移动变化,所述连接件为一刚性杆体,所述刚性杆体一端与一单元板铰接,刚性杆体另一端与另一单元板上的轨迹槽滑动配合。
10.进一步的,所述连接件两端的间距能随单元板的移动变化,所述连接件为折叠杆、链条、伸缩杆或绳子中的任意一种,所述连接件两端分别与相邻的单元板铰接。
11.进一步的,连接件为折叠杆时,连接件两端分别铰接于相邻两个单元板的同侧或异侧;
12.连接件不为折叠杆时,连接件两端分别铰接于相邻两个单元板的同侧。
13.进一步的,所述的单元板经伸缩机构驱动沿内孔径向移动;所述单元板中部设置有用于连接伸缩机构的连接部,所述连接部为连接柱或连接孔,所述连接部的轴线与单元板中心线相交。
14.进一步的,所述伸缩机构为多爪卡盘或多爪夹爪,多爪卡盘或多爪夹爪的爪数与单元板的数量相对应。
15.进一步的,所述伸缩机构安装在运动模块的末端,由运动模块驱动移动,所述运动模块至少包括一个驱动多爪卡盘沿压缩机轴向移动的驱动件。
16.进一步的,所述单元板端部侧壁设置有容纳连接件端部的安装槽,各个单元板处于内极限位置时,连接件完全容纳于对应的两个安装槽围成的容腔中。
17.进一步的,所述内孔内壁设置有橡胶垫层。
18.本发明解决技术问题所采用的另一个技术方案是,提供一种焊渣防护方法,采用上述的可变内径式焊渣防护机构,包括以下步骤:
19.s1:将挡板安装在伸缩机构上;
20.s2:伸缩机构伸长,带动各个单元板沿径向移动至外极限位置,使挡板内径增大;
21.s3:运动模块带动伸缩机构移动,使挡板套在压缩机上并移动至安装位置;
22.s4:伸缩机构缩短,带动各个单元板沿径向移动至内极限位置,使挡板的内孔壁与压缩机外周定位面贴合,挡板在垂直方向会在压缩机l支脚上限位进行限位固定,然后,运动模块带动伸缩机构移出,并与对应的单元板分离;
23.s5:对压缩机进行焊接作业,挡板进行挡渣;
24.s6:焊接作业完成后,运动模块带动伸缩机构移入,使伸缩机构与对应的单元板连接,伸缩机构伸长,带动各个单元板沿径向移动至外极限位置,使挡板内径增大;
25.s7:运动模块带动伸缩机构移动,使挡板移出压缩机。
26.与现有技术相比,本发明具有以下有益效果:挡板内孔径可变,使得挡板内孔与压缩机外壁间隙可调,在移入移出压缩机时,内孔径变大,在压缩机上安装到位后,内孔径变小,使挡板贴合压缩机外壁,阻挡焊渣飞溅至压缩机表面。
附图说明
27.下面结合附图对本发明专利进一步说明。
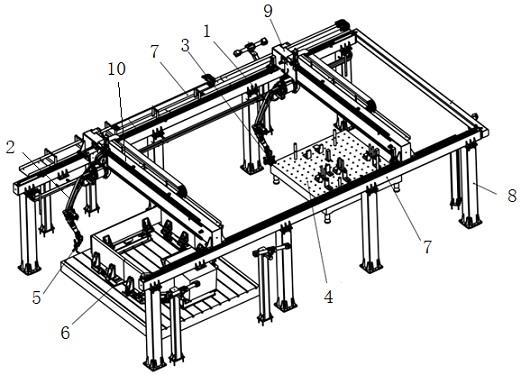
28.图1为挡板与压缩机的配合结构示意图。
29.图2为单元板处于内极限位置时的示意图。
30.图3为单元板不处于内极限位置时的示意图。
31.图4为单元板上设置安装槽的结构示意图。
32.图5为单元板上设置的轨迹槽结构示意图。
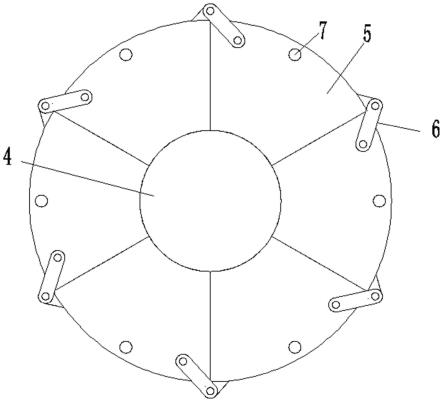
33.图6为伸缩机构为气动夹爪时与挡板的配合结构示意图一。
34.图7为伸缩机构为气动夹爪时与挡板的配合结构示意图二。
35.图中:1-挡板;2-压缩机;3-l支脚;4-内孔;5-单元板;6-连接件;7-连接部;8-折叠杆;9-安装槽;10-刚性杆体;11-轨迹槽;12-伸缩机构。
具体实施方式
36.下面更详细地描述本发明的优选实施方式,然而应该理解,可以以各种形式实现本发明而不应被这里阐述的实施方式所限制。相反,提供这些实施方式是为了使本发明更加透彻和完整,并且能够将本发明的范围完整地传达给本领域的技术人员。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
37.实施例1:
38.如图1-5所示,一种可变内径式焊渣防护机构,包括挡板1,挡板中部设有对压缩机2进行让位的内孔4,所述挡板以内孔轴线为中心圆周等分为至少两块单元板5,单元板两端部分别经连接件6与相邻的单元板的相邻端相连接;
39.所述连接件至少一端与其所连接的单元板的位置固定;
40.一种方案为,连接件两端的间距能随单元板的移动变化;
41.另一种方案为,连接件两端的间距不随单元板的移动变化,连接件一端与所连接的单元板位置固定,连接件另一端与所连接的单元板位置可变;
42.各个单元板处于内极限位置时,相邻的单元板的端部贴合,各个单元板内端围成内孔,且内孔壁与压缩机外周定位面相贴合,内孔壁与压缩机外周定位面的形状相适配;
43.各个单元板不处于内极限位置时,相邻的单元板的之间形成间隙。
44.在实际应用中,挡板的形状根据具体防护需求进行设置,可以为圆板或多边形板。
45.在本实施例中,如图4所示,所述单元板端部侧壁设置有容纳连接件端部的安装槽9,各个单元板处于内极限位置时,连接件完全容纳于对应的两个安装槽围成的容腔中。
46.在本实施例中,为避免硬接触造成磨损,所述内孔内壁设置有橡胶垫层。
47.使用时,移入移出压缩机时,通过驱动单元板沿径向向外移动,使得内孔径变大,便于将挡板套装在压缩机的预设位置;到位后驱动单元板沿径向向内移动,使得内孔壁与压缩机外周定位面贴合,形成无间隙的配合,焊接时,焊渣无法飞溅至压缩机表面。
48.本设计挡板内孔径可变,使得挡板内孔与压缩机外壁间隙可调,在移入移出压缩机时,内孔径变大,在压缩机上安装到位后,内孔径变小,使挡板贴合压缩机外壁,阻挡焊渣飞溅至压缩机表面。
49.实施例2
50.如图5所示,实施例2提供连接件一端与所连接的单元板位置固定,连接件另一端与所连接的单元板位置可变的具体方案。
51.在本实施例中,述连接件为一刚性杆体10,所述刚性杆体一端与一单元板铰接,刚性杆体另一端与另一单元板上的轨迹槽滑动配合。
52.使用时,在单元板径向移动过程,刚性杆体活动端沿轨迹槽滑动,刚性杆体铰接端随之摆动。
53.实施例3
54.如图2、图3所示,实施例3提供连接件两端的间距能随单元板的移动变化的具体方案。
55.在本实施例中,所述连接件为折叠杆8、链条、伸缩杆或绳子中的任意一种,所述连接件两端分别与相邻的单元板铰接。
56.在本实施例中,连接件为折叠杆时,连接件两端分别铰接于相邻两个单元板的同侧或异侧;位于异侧时,折叠杆的两端杆体的铰接端位于挡板外周;
57.连接件不为折叠杆时,连接件两端分别铰接于相邻两个单元板的同侧。
58.使用时,在单元板径向移动过程,连接件两端的间距能随单元板的移动变化而变化,各个单元板处于内极限位置时,连接件两端的间距最小,各个单元板处于外极限位置时,连接件两端的间距最大。
59.实施例4
60.如图6、图7所示,实施例4提供单元板径向移动的具体驱动方案。
61.在本实施例中,所述的单元板经伸缩机构12驱动沿内孔径向移动;所述单元板中部设置有用于连接伸缩机构的连接部7,所述连接部为连接柱或连接孔,所述连接部的轴线与单元板中心线相交。
62.在实际应用中,因连接部的轴线与单元板中心线相交,则单元板必须为对称的形状,优选为扇形板。
63.在实际应用中,为便于相互分离,伸缩机构的伸缩端与连接部沿轴线套接。
64.在本实施例中,所述伸缩机构为多爪卡盘或多爪气动夹爪,多爪卡盘或多爪气动夹爪的爪数与单元板的数量相对应。
65.在本实施例中,所述伸缩机构安装在运动模块的末端,由运动模块驱动移动,所述运动模块至少包括一个驱动多爪卡盘沿压缩机轴向移动的驱动件,驱动件可为移动滑台或伸缩杆。
66.使用时,通过伸缩机构的伸缩带动单元板沿径向移动,通过运动模块带动伸缩机构移动,使挡板移入或移出压缩机。
67.在实际应用中,运动模块可为机械手、n轴移动平台、气缸、电动推杆或液压缸。
68.实施例5
69.如图1、图6、图7所示,以实施例4为基础,提供一种焊渣防护方法。
70.该方法包括以下步骤:
71.s1:将挡板安装在伸缩机构上;
72.s2:伸缩机构伸长,带动各个单元板沿径向移动至外极限位置,使挡板内径增大;
73.s3:运动模块带动伸缩机构移动,使挡板套在压缩机上并移动至安装位置;
74.s4:伸缩机构缩短,带动各个单元板沿径向移动至内极限位置,使挡板的内孔壁与压缩机外周定位面贴合,挡板在垂直方向会在压缩机l支脚3上限位进行限位固定,然后,运动模块带动伸缩机构移出,并与对应的单元板分离;
75.s5:对压缩机进行焊接作业,挡板进行挡渣;
76.s6:焊接作业完成后,运动模块带动伸缩机构移入,使伸缩机构与对应的单元板连接,伸缩机构伸长,带动各个单元板沿径向移动至外极限位置,使挡板内径增大;
77.s7:运动模块带动伸缩机构移动,使挡板移出压缩机。
78.除非另外具体说明,否则在这些实施例中阐述的部件和步骤的相对布置、数字表达式和数值不限制本技术的范围。在这里示出和讨论的所有示例中,任何具体值应被解释为仅仅是示例性的,而不是作为限制。因此,示例性实施例的其它示例可以具有不同的值。应注意到:相似的标号和字母表示类似项,因此,一旦某一项被定义,则在随后中不需要对其进行进一步讨论。
79.在本技术的描述中,需要理解的是,方位词如“前、后、上、下、左、右”、“横向、竖向、垂直、水平”和“顶、底”等所指示的方位或位置关系通常是基于所示的方位或位置关系,仅是为了便于描述本技术和简化描述,在未作相反说明的情况下,这些方位词并不指示和暗示所指的装置或元件必须具有特定的方位或者以特定的方位构造和操作,因此不能理解为对本技术保护范围的限制;方位词“内、外”是指相对于各部件本身的轮廓的内外。
80.为了便于描述,在这里可以使用空间相对术语,如“在
……
之上”、“在
……
上方”、“在
……
上表面”、“上面的”等,用来描述特征的空间位置关系。应当理解的是,空间相对术语旨在包含除了所描述的方位之外的在使用或操作中的不同方位。
81.此外,需要说明的是,使用“第一”、“第二”等词语来限定零部件,仅仅是为了便于对相应零部件进行区别,如没有另行声明,上述词语并没有特殊含义,因此不能理解为对本技术保护范围的限制。
82.本技术如果公开或涉及了互相固定连接的零部件或结构件,那么,除另有声明外,固定连接可以理解为:能够拆卸的固定连接(例如使用螺栓或螺钉连接),也可以理解为:不可拆卸的固定连接(例如铆接、焊接),当然,互相固定连接也可以为一体式结构(例如使用铸造工艺一体成形制造出来)所取代(明显无法采用一体成形工艺除外)。
83.上列较佳实施例,对本发明的目的、技术方案和优点进行了进一步详细说明,所应理解的是,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。