技术特征:
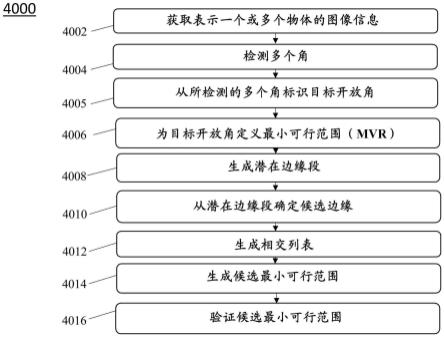
1.一种计算系统,包括:非暂时性计算机可读介质;与具有视场的相机通信的至少一个处理电路,所述至少一个处理电路被配置为,当一个或多个物体处于或者已经处于所述视场中时,执行存储在所述非暂时性计算机可读介质上的指令以用于:获取表示一个或多个物体的图像信息,每个物体具有多个边缘,其中所述图像信息由所述相机生成并描述与所述一个或多个物体相关联的至少物体外观;基于所述图像信息检测所述一个或多个物体的多个角;从所述多个角中标识目标开放角;为所述目标开放角定义最小可行范围,其中所述最小可行范围通过以下定义:生成多个候选边缘段;从所述多个候选边缘段中确定多个候选边缘;定义所述多个候选边缘的相应候选边缘之间的多个交点;基于所述多个交点定义一组潜在最小可行范围候选;从所述一组潜在最小可行范围候选中为所述多个角中的所述目标开放角选择最小可行范围候选;以及验证所述最小可行范围候选作为所述目标开放角的最小可行范围。2.如权利要求1所述的计算系统,其中所述图像信息从三维视图卷绕为二维视图。3.如权利要求1所述的计算系统,其中生成所述多个边缘段包括在由最小候选大小和最大候选大小定义的范围内生成所述多个边缘段。4.如权利要求1所述的计算系统,其中所述最小可行范围候选是基于最小面积从所述一组潜在最小可行范围候选中选择的。5.如权利要求1所述的计算系统,其中标识所述目标开放角包括识别所选择的开放角不与另一个物体相邻。6.如权利要求1所述的计算系统,其中验证所述最小可行范围候选作为最小可行范围包括:执行所述最小可行范围候选与至少一个其他最小可行范围候选的重叠验证。7.如权利要求1所述的计算系统,其中从所述多个候选边缘段确定所述多个候选边缘包括:根据段长度标准来评估所述多个候选边缘段。8.如权利要求1所述的计算系统,其中从所述多个候选边缘段确定所述多个候选边缘包括:根据正交性标准来评估所述多个候选边缘段。9.如权利要求1所述的计算系统,其中从所述多个候选边缘段确定所述多个候选边缘包括:根据位置标准来评估所述多个候选边缘段。10.如权利要求1所述的计算系统,其中验证所述最小可行范围候选是根据填充验证操作来执行的。11.一种控制机器人系统的方法,所述机器人系统包括非暂时性计算机可读介质、与具有视场的相机通信并被配置为执行指令的至少一个处理电路,所述方法包括:获取表示一个或多个物体的图像信息,每个物体具有多个边缘,其中所述图像信息由所述相机生成并描述与所述一个或多个物体相关联的至少物体外观;基于所述图像信息检测所述一个或多个物体的多个角;
从所述多个角中标识目标开放角;为所述目标开放角定义最小可行范围,其中所述最小可行范围通过以下定义:生成多个候选边缘段;从所述多个候选边缘段中确定多个候选边缘;定义所述多个候选边缘的相应候选边缘之间的多个交点;基于所述多个交点定义一组潜在最小可行范围候选;从所述一组潜在最小可行范围候选中为所述多个角中的所述目标开放角选择最小可行范围候选;以及验证所述最小可行范围候选作为所述目标开放角的最小可行范围。12.如权利要求11所述的方法,其中生成所述多个边缘段包括在由最小候选大小和最大候选大小定义的范围内生成所述多个边缘段。13.如权利要求11所述的方法,其中所述最小可行范围候选是基于最小面积从所述一组潜在最小可行范围候选中选择的。14.如权利要求11所述的方法,其中标识所述目标开放角包括识别所选择的开放角不与另一个物体相邻。15.如权利要求11所述的方法,其中验证所述最小可行范围候选作为最小可行范围包括:执行所述最小可行范围候选与至少一个其他最小可行范围候选的重叠验证。16.如权利要求11所述的方法,其中从所述多个候选边缘段确定所述多个候选边缘包括:根据段长度标准来评估所述多个候选边缘段。17.如权利要求11所述的方法,其中从所述多个候选边缘段确定所述多个候选边缘包括:根据正交性标准来评估所述多个候选边缘段。18.如权利要求11所述的方法,其中从所述多个候选边缘段确定所述多个候选边缘包括:根据位置标准来评估所述多个候选边缘段。19.如权利要求11所述的方法,其中验证所述最小可行范围候选是根据填充验证操作来执行的。20.一种非暂时性计算机可读介质,包括用于由与具有视场的相机通信并被配置的至少一个处理电路执行的指令,当一个或多个物体处于或者已经处于所述视场中时,所述指令被配置为:获取表示一个或多个物体的图像信息,每个物体具有多个边缘,其中所述图像信息由所述相机生成并描述与所述一个或多个物体相关联的至少物体外观;基于所述图像信息检测所述一个或多个物体的多个角;从所述多个角中标识目标开放角;为所述目标开放角定义最小可行范围,其中所述最小可行范围通过以下定义:生成多个候选边缘段;从所述多个候选边缘段中确定多个候选边缘;定义所述多个候选边缘的相应候选边缘之间的多个交点;基于所述多个交点定义一组潜在最小可行范围候选;以及从所述一组潜在最小可行范围候选中为所述多个角中的所述目标开放角选择最小可行范围候选;
验证所述最小可行范围候选作为所述目标开放角的最小可行范围。
技术总结
本公开涉及用于物体大小检测的机器人系统。一种计算系统,包括与具有视场的相机通信的处理电路。处理电路基于视场中的物体获取图像信息,并为目标开放角定义最小可行范围。潜在最小可行范围通过标识物体的候选边缘并基于候选边缘确定潜在交点来定义。最小可行范围然后可以从潜在最小可行范围中被标识和验证。然后可以从潜在最小可行范围中被标识和验证。然后可以从潜在最小可行范围中被标识和验证。
技术研发人员:余锦泽 金本芳树 何塞
受保护的技术使用者:牧今科技
技术研发日:2022.05.18
技术公布日:2022/11/22
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。