1.本发明涉及一种用于扭矩离合器的铰链执行器、一种具有这种铰链执行器的扭矩离合器、一种具有这种扭矩离合器的动力总成以及一种具有这种动力总成的机动车。
背景技术:
2.从现有技术中已知用于操纵例如用于机动车的扭矩离合器的铰链执行器,所述扭矩离合器例如为用于动力总成的摩擦离合器。例如在de 10 2012 220 436 a1中示出这种铰链执行器。通常产生以下问题,对于铰链执行器而言可供使用的结构空间,尤其横向于铰链执行器的主延伸的结构空间,是极其有限的。然而同时成本压力,尤其在汽车行业中的成本压力,不仅在零件成本方面而且在安装成本方面是高的。
技术实现要素:
3.以此为出发点,本发明基于如下目的,至少部分地克服从现有技术中已知的缺点。根据本发明的特征在独立权利要求中得出,关于其有利的设计方案在从属权利要求中示出。权利要求的特征能够以任何技术上有意义的方式和方法组合,其中对此也可以考虑出自下面的说明书的阐述以及出自附图的特征,这包括本发明的补充的设计方案。
4.本发明涉及一种用于扭矩离合器的铰链执行器,至少具有如下部件:
[0005]-至少一个操纵指,用于将操纵路径传递到扭矩离合器上;
[0006]-具有主延伸的杠杆,所述杠杆与操纵指连接;
[0007]-铰链支承件,用于可枢转地支承杠杆;和
[0008]-与杠杆以传递力的方式接触的横杆,其中横杆沿着主延伸能够在分离位置和接合位置之间移动,并且其中借助于横杆的移动,杠杆可枢转,以传递操纵路径。
[0009]
铰链执行器的特征尤其在于,杠杆连同操纵指一起是唯一的确定杠杆的杠杆刚度的弹簧元件。
[0010]
在前面的和后面的说明中使用的序数词,只要没有明确地相反指示,仅用于一一对应的可区分性并且不描述提到的部件的顺序或次序。大于一的序数词不一定引起强制性地必须存在另一同类部件。
[0011]
此外,进行空间描述的术语左侧和右侧任意地选择并且也能够(统一)交换地使用。其仅用于良好的概览,尤其关于部件的成对设置。
[0012]
当在没有明确地另作说明的情况下使用轴向方向、径向方向或环周方向和相应的术语时,在下文中参照铰链执行器的操纵轴线(例如围绕所述旋转轴线传递扭矩的扭矩离合器的旋转轴线)。此外,涉及铰链执行器提到杠杆的主延伸,其中杠杆可围绕铰接支承件的枢转轴线枢转,所述枢转轴线横向于(在理想的观察中90
°
)主延伸定向。所述枢转轴线可能在杠杆的枢转运动期间可移置和/或不处于进行支承的构件的中央,例如不与栓的中央轴线相一致。操纵路径的定向可以近似地理解成第三空间方向,其中操纵路径横向于(在理想的观察中90
°
)枢转轴线并且在杠杆的枢转运动期间以对应于操纵路径的枢转角度可变
地横向于主延伸定向。杠杆刚度从杠杆在操纵路径的方向上相对于主延伸具有偏转的弯曲中得出,其中杠杆的有效长度通过借助于横杆的操纵改变,更确切地说,在操纵路径增加的情况下缩短。这就是说,在横杆处于接合位置中时,杠杆的有效长度最大,并且在横杆处于分离位置中时,杠杆的有效长度最小。这在更下文中详细阐述。杠杆除了其主延伸之外具有在左侧和右侧之间的构造延伸(平行于枢转轴线)。操纵路径相对于所述构造面横向地设置。杠杆的侧向运动,即向左或向右的运动(必要时有间隙)被阻止。
[0013]
在此提出的铰链执行器例如设计用于可轴向操纵的扭矩离合器,例如可轴向压紧的摩擦离合器。替选地,铰链执行器通常设计用于传递轴向力,优选地借助于围绕其旋转轴线旋转的中央轴。铰链执行器包括至少一个、优选两个操纵指,其中两个操纵指(例如在扭矩离合器中使用时)作用于操纵轴承。操纵轴承设计用于传递操纵路径,例如传递到扭矩离合器上。操纵指与杠杆连接,优选一件式地形成,其中操纵指设置在杠杆的主延伸的延长部中。所述主延伸在简化的模型中对应于杠杆,其中杠杆的例如作为金属板构件的真实构件不强制性地必须具有关于主延伸的对称性并且也不强制性地必须在其主延伸(中的中线)的方向上具有其最大的延伸方向。主延伸和枢转轴线形成一个平面,并且操纵指的操纵面处于所述平面中。中轴线在主延伸的所述平面中伸展,所述中轴线在两个操纵指的情况下居中地在操纵指之间伸展并且与枢转轴线优选垂直地相交。对于多种应用有利的是,杠杆成本适宜地并且节约结构空间地构成,使得杠杆作为具有加固肋和/或卷边的金属板构件在该方面是特别有利的。刚好在由金属板构成的这种实施方式中,主延伸的理论平面不完全地伸展穿过杠杆的真实构件。
[0014]
杠杆借助于铰链支承件围绕枢转轴线可枢转地支承,使得因此杠杆(围绕枢转轴线)枢转以借助于至少一个操纵指施加操纵路径描述杠杆的基本功能。此外,在所述铰链执行器中设有横杆。横杆与杠杆以这样传递力的方式接触,使得杠杆借助于横杆沿着主延伸的运动围绕枢转轴线枢转。优选地由唯一的或多个、优选两个用于低摩擦地将力传递到杠杆上的承载辊形成的横杆能够在分离位置和接合位置之间移动。横杆连同杠杆一起形成斜坡状的操纵组装件。例如,借助横杆侧的杠杆斜坡(在杠杆的背侧)和在与横杆相对置的侧处(例如在基板处)的支承件轨道形成操纵组装件。杠杆斜坡的和/或支承件轨道的斜率对于个体化的要求可任意地构成。对于被线性驱动的横杆(例如借助于具有作为线性运动轴线的螺杆轴线的螺杆传动装置)有利的是,支承件轨道平坦地构成。
[0015]
在该处要注意的是,铰链执行器经由横杆(如在上文中描述的那样)操纵,其中例如旋转的电驱动机器连接于螺杆传动装置,所述电驱动机器引起横杆的斜坡状的操纵组装件的相对运动并且借助于与杠杆的斜坡状的连接强制至少一个操纵指沿着操纵路径的运动。在一个优选的实施方式中,(由于安装情形引起地)在操纵指处在整个操纵路径上由横杆在接合位置和分离位置之间的运动引起的操纵力(近似)恒定。
[0016]
杠杆在横杆的接合位置中不提供操纵行程或提供最小的操纵行程(例如对于最小要求的轴向预紧),并且在横杆的分离位置中经由操纵指提供最大操纵行程。要注意的是,主延伸随杠杆一起运动,从而出于与杠杆一起运动的坐标系的角度,横杆在杠杆斜坡的斜率例如恒定的情况下描述圆形轨道或弧形轨道。横杆仍然尤其优选地沿着刚性的螺杆轴线运动,其中螺杆轴线固定至固定的构件,例如铰链执行器的基板。
[0017]
横杆如在上文中已经描述的那样例如由具有螺杆轴线的螺杆传动装置例如滚珠
丝杠传动装置被驱动,其中那么横杆本身构成为滑块,所述滑块包括被驱动的(可轴向运动的)螺杆螺母或者被驱动的(可轴向运动的)螺杆,并且进行驱动的(旋转的)螺杆或进行驱动的(旋转的)螺杆螺母由旋转的、优选电的驱动机器驱动。螺杆轴线因此优选以90
°
横向于枢转轴线并且相对于杠杆的主延伸以相对斜坡角度定向。
[0018]
在此现在提出,不形成附加的弹簧元件,所述弹簧元件确定杠杆的杠杆刚度。杠杆的杠杆刚度是铰链执行器的在操纵中起作用的刚度的确定的大小。其他刚度的影响,例如在铰链支承件或单独的构件之间的连接部位中的刚度的影响,相对于此小得多,优选地可忽略。更确切地说,杠杆或杠杆本身的根据横杆的位置起作用的长度形成构件,所述构件简化地根据横梁例如悬臂梁的类型来确定杠杆刚度。在一个优选的实施方式中,至少一个操纵指是横梁的一部分,因此部分地具有杠杆刚度。在另一实施方式中,杠杆除了至少一个操纵指之外(在考虑施加的负荷的情况下)几乎是理想刚性的,即其弯曲变形可忽略,并且杠杆刚度唯一地由至少一个操纵指来确定。在又一实施方式中,至少一个操纵指(在考虑施加的负荷的情况下)几乎是理想刚性的。在具有杠杆(或杠杆的至少一部分)作为弹簧元件的实施方式中,杠杆的(支承件侧的)部分在铰链支承件和横杆之间仅可忽略地变形,并且仅杠杆的(指侧的)部分在横杆和操纵指之间(更确切地说在横杆和操纵指的操纵面之间)形成弹簧元件,即根据悬臂梁的类型。在另一实施方式中,杠杆的(轴承侧的)部分在横杆和铰链执行器之间部分地具有杠杆刚度,使得弹簧元件对应于3点支承的横梁,其中类似于三点弯曲试验,铰链支承件和操纵指的操纵面对应于两个支座并且横杆对应于检查头。
[0019]
在两个操纵指的情况下,由于公差可能出现杠杆的扭曲(例如围绕主延伸),例如由于在(完全)松弛位置和/或接合位置(最小操纵行程)中在操纵指之间沿操纵路径的方向的直至0.2mm[十分之二毫米]的差。第一操纵指那么在操纵行程沿着操纵路径构成的情况下首先单独地或者(与第二操纵指相比)更强地以传递力的方式接合并且第二操纵指随后跟随。
[0020]
由于取消单独的(附加的)弹簧元件,不仅可降低成本而且也可节约结构空间。
[0021]
此外,在铰链执行器的一个有利的实施方式中提出,两个操纵指以指间距横向于杠杆的主延伸设置,并且铰链执行器具有平行于指间距的最大横向尺寸,其中最大横向尺寸小于指间距的4倍,优选小于2.5倍。
[0022]
在该实施方式中,铰链执行器的宽度与之前已知的实施方式相比明显减小。指间距,即在两个操纵指之间产生的自由空间的横向尺寸,例如由要用轴向力操纵的部件的尺寸,例如在扭矩离合器的操纵轴承的情况下由轴直径,和/或要求的操纵力来确定。铰链执行器的最大横向尺寸是在左侧和右侧之间的最大延伸和/或如下延伸,在所述延伸中,传统的铰链执行器具有其在左侧和右侧之间的最大延伸,其因此迄今为止是确定结构空间的。在刚好小于4倍[四倍]的比值中,杠杆更刚度或者能够以较小的金属板厚度从而成本更适宜地制成。在小于2.5倍的比值中,可明显地节约结构空间。在一个尤其优选的实施方式中,比值例如为指间距的2.2倍。那么,在铰链支承件中形成最大横向尺寸。那么,确定结构空间的部件例如是用于例如在机动车的变速器中安装铰链执行器的紧固元件。
[0023]
此外在铰链执行器的一个优选的实施方式中提出,铰链执行器具有两个带有栓轴线的栓和各一个配合的栓容纳部,其中栓容纳部分别在杠杆的相对于主延伸和栓轴线优选以90
°
成角度的支承部段中形成,其中优选地在分离位置中,杠杆的杠杆刚度位于4kn/mm和
5kn/mm之间。
[0024]
在该实施方式中,栓容纳部在杠杆的成角度的支承部段中形成,例如在(优选冷)成型的接片中。优选地,成角度的支承部段在杠杆的侧向外部设置。相应的栓延伸穿过配合的栓容纳部。栓又容纳在对应的支承件容纳部中并且间接地或直接地借助于支承件容纳部(连同整个铰链执行器)可安装。在一个实施方式中,栓旋转地固定。在一个实施方式中,栓支承为,使得其在杠杆的枢转运动中一起转动。在一个实施方式中,栓的一起运动是允许的,但是不是必需的。在一个优选的实施方式中,(那么两个栓一致的)栓轴线对应于杠杆的枢转轴线。在一个实施方式中,枢转轴线与(那么两个栓一致的或平行的)栓轴线平行地定向。在又一个实施方式中,枢转轴线相对于至少一个栓轴线倾斜地定向。枢转轴线的位置由栓容纳部和栓的(起支承作用的)外面构成的相应的对的形状确定,使得例如在所述对的一致的实施方式中,枢转轴线与栓轴线一致。如果该对的形状之一偏离同心性和/或两个栓的栓轴线不一致,那么枢转轴线偏离栓轴线。例如,枢转轴线那么经由杠杆的枢转轴线不固定,而是迁移。在一个优选的实施方式中,枢转轴线的这种迁移运动处于允许的公差内并且能够近似地、即在技术考虑下描述成固定的。
[0025]
在一个优选的实施方式中,实现相对高的杠杆刚度,优选地由于借助于具有栓容纳部的成型的接片的加固效应。在一个特别优选的实施方式中,在横杆的分离位置中,即在杠杆的有效长度缩短时或在杠杆的指侧的部分缩短时,杠杆的杠杆刚度,即铰链执行器的(至少近似)操纵有效的刚度,在4kn/mm[每毫米四千牛顿]和5kn/mm之间,例如为大致4.5kn/mm。借此,满足对相对高的杠杆刚度的客户要求。
[0026]
此外在铰链执行器的一个有利的实施方式中提出,铰链支承件具有两个带有栓轴线的栓和各一个配合的栓容纳部,其中栓容纳部分别由杠杆的支承接片形成,其中支承接片沿着主延伸远离操纵指延伸,其中优选地在分离位置中,杠杆的杠杆刚度在1kn/mm和2kn/mm之间。
[0027]
在该实施方式中,对于栓和其支承件容纳部以及对于得出的枢转轴线适用的是与铰链支承件的之前提到的实施方式相同的以及不同的内容。与具有成角度的支承部段的实施方式相反地,在此,栓容纳部由支承接片形成,所述支承接片在杠杆的延长部中延伸至铰链支承件。在一个实施方式中,支承接片,例如大致沿主延伸的方向和/或大致沿横杆的螺杆轴线的方向,可引入到铰链支承件中,使得相应的支承接片的栓容纳部在相应的栓后方设置(即关于由横杆从接合位置直至分离位置的运动得出的操纵路径),其中优选地,栓已经安装。杠杆借助于栓容纳部中的至少一个的形状和/或偏离运行情形(即杠杆在接合位置和分离位置之间的定向)的安装定向防止自动拆卸。
[0028]
支承接片优选地设计成,使得杠杆的杠杆刚度与具有成角度的支承部段的实施方式相比减小。在一个特别优选的实施方式中,杠杆处于分离位置中,即在杠杆的有效长度缩短时或在杠杆的指侧的部分缩短时,杠杆的杠杆刚度,即铰链执行器的(至少几乎)操纵有效的刚度,在1kn/mm[每毫米一千牛顿]和2kn/mm之间,例如为大约1.7kn/mm。借此,满足对相对小的杠杆刚度的客户要求。
[0029]
此外,在铰链执行器的一个有利的实施方式中提出,支承接片关于以栓轴线作为法线的横截面弧形地,优选s形地,在其余的杠杆和栓之间伸展。
[0030]
在铰链执行器的所述实施方式中,在上文中已经描述的支承接片由在横杆的移动
路径的区域中非常平坦的杠杆成形,更确切地说朝向或远离横杆。横截面因此处于如下平面中,栓轴线相对于所述平面(在理想的观察中)法向地定向。所述横截面描述在其余的杠杆和铰链支承件之间的弧形形状,优选s形。借此,由于与笔直的或最短的连接相比支承接片的延长,实现杠杆在铰链支承件处的软接合。替选地或附加地,可节约沿操纵路径的方向在杠杆的背侧的结构空间,其方式为:在支承接片朝向横杆的弧形形状的情况下,铰链支承件能够沿操纵路径的方向更深地,即距横杆更近地设置。所述结构空间在多种应用中对应于在围绕旋转轴线传递扭矩的轴中应用中的轴向结构空间。
[0031]
此外,在铰链执行器的一个优选的实施方式中提出,杠杆借助于铰链支承件侧向固定,优选地借助于根据按照上述描述的实施方式的栓中的至少一个栓。
[0032]
在该实施方式中,杠杆无需附加的部件侧向地,即向左和向右,借助于铰链支承件固定。例如,侧向止挡向右和/或向左形成,例如借助于支承元件的凸肩和/或借助于支承件容纳部的壁部。在一个优选的实施方式中,侧向固定借助于根据上述实施方式之一的栓中的至少一个形成,优选地借助于两个栓。对此,栓例如具有至少一个凸肩(直径扩展),优选两个凸肩,其中优选地,所述凸肩不仅与相应的栓容纳部、而且与相应的支承件容纳部以传递力的方式(例如有间隙地)接触。在另一实施方式中,栓中的至少一个栓借助于螺丝、优选安装螺丝固定,其中螺丝延伸穿过相关的螺丝的配合的槽或孔中或者延伸到其中。两侧的侧向固定在杠杆的柔性的、尤其(围绕主延伸)扭转柔性的实施方式中是特别有利的。借助在此提出的实施方式,可实现简单的构造和/或小的结构空间需求。要指出的是,杠杆优选地在符合设计的负荷中仅可弹性地扭转。
[0033]
此外,在铰链执行器的一个有利的实施方式中提出,杠杆包括两个部分杠杆,所述两个部分杠杆借助于至少一个杠杆桥彼此一件式地连接。
[0034]
在该实施方式中,杠杆被分成例如与两个操纵指中的各一个相关联的两个部分杠杆。通过设有两个部分杠杆,其中所述两个部分杠杆仅借助于至少一个杠杆桥,优选一件式地彼此连接,实现特别小的(围绕主延伸的)扭转刚度。借此允许关于至少一个操纵指的操纵面的大的公差,因为能够以小的阻力补偿两个操纵指关于要进行操纵的配合面,例如扭矩离合器的操纵轴承的要进行操纵的配合面的角度偏差或错位。这种(小的)阻力例如由铰链支承件中的(小的)横向力和/或在两个操纵指的两个单独的操纵面处和/或在横杆处的(小的)力差确定,所述横杆优选地(在左侧和在右侧)包括两个承载辊。在具有弯折的支承件部段的一个实施方式中,优选地,设有唯一的杠杆桥,所述杠杆桥以距至少一个操纵指(与在下文中描述的实施方式相比)大的间距设置,使得在操纵指中实现足够小的扭转刚度,同时杠杆刚度相对大(由于弯折的支承件部段)。在具有支承接片的一个实施方式中,优选地设有两个杠杆桥,其中(第一)杠杆桥(与具有唯一的杠杆桥的之前提到的实施方式相比)靠近至少一个操纵指设置,并且另外的(第二)杠杆桥靠近铰链支承件设置,使得在操纵指中以及在铰链支承件中,尽管杠杆刚度(由于支承接片)相对小,但不达到过小的扭转刚度。
[0035]
根据另一方面,提出一种用于动力总成的具有旋转轴线的扭矩离合器,至少具有如下部件:
[0036]-根据按照上述描述的实施方式的铰链执行器;
[0037]-扭矩组,优选地可轴向压紧的摩擦组,所述扭矩组可借助于铰链执行器轴向操
纵,用于可调节地传递扭矩;和
[0038]-在扭矩组和铰链执行器的操纵指之间的操纵轴承,
[0039]
其中借助于铰链执行器的横杆,可将操纵运动经由操纵轴承传递到扭矩组上。
[0040]
在此提出的扭矩离合器例如是摩擦离合器或者形状配合离合器,如例如爪式离合器或所谓的楔形离合器。借助于扭矩离合器,能够将扭矩围绕旋转轴线可分离地传递。扭矩离合器为切换元件,例如用于传递或分离传递扭矩的连接,其中扭矩组承担所述任务。扭矩组借助于铰链执行器可轴向操纵,作为摩擦组例如轴向可压紧地构成,其中那么由铰链执行器施加的操纵力或由在横杆的分离位置和接合位置之间设定的位置中得出的当前的操纵行程,必要时经由杠杆弹簧传动,与期望的可传递的最大扭矩成比例。铰链执行器设置成,使得所述铰链执行器或其枢转轴线(在忽略弹簧刚度的条件下和在操纵枢转轴线的必要时期望的游移运动的情况下)是固定的,例如借助于在固定的构件处的安装螺钉,并且借助于扭矩离合器连接的轴,例如变速器输入轴,(在具有两个操纵指的实施方式中)在操纵指之间伸展。至少一个操纵指优选地经由操纵轴承作用于旋转的轴向轴承环上并且旋转的轴向轴承环将操纵力从旋转的轴向轴承环传导到扭矩组上。借助于操纵轴承,操纵指从而铰链执行器是扭矩可选的。在横杆的接合位置中,没有操纵路径或仅最小的操纵路径(例如对于期望的最小预紧)被施加到操纵轴承上,并且在横杆的分离位置中,最大操纵路径(例如对于摩擦组的最大压紧)被施加到操纵轴承上。
[0041]
扭矩离合器对于扭矩的(可调节地)可分离的可传递性具有可轴向操纵的扭矩组,例如可轴向压紧的摩擦组。扭矩的可传递性的可调节性在此也包括切换,即分离和(完全)连接,如在爪式离合器中那样,以及在摩擦离合器中无级地(或者例如由于操控递增地)调节最大可传递的扭矩量,例如用于消除扭矩过量。在摩擦组中,通常设有至少两个摩擦板和至少一个离合器盘。在一个简单的实施方式中,唯一的离合器盘设置在第一摩擦板,即轴向可运动的压紧板,和第二摩擦板,优选轴向紧固的反压板之间,并且在它们之间为了摩擦配合的扭矩传递可借助于压紧力压紧。所述压紧力由铰链执行器产生或(伺服)支持,其中提供的操纵力通常借助于杠杆弹簧转换成压紧力。由于压紧力,经由面状的摩擦副在离合器盘的对于摩擦配合预先确定的区域和相应的摩擦板的(相应的)配合的配合摩擦区域之间得出摩擦力,所述摩擦力与形成的摩擦面的平均半径相乘得到可传递的扭矩。与摩擦副的数量相乘,大致得出摩擦离合器的可传递的(最大)总扭矩。在摩擦组的未压紧状态中,没有扭矩或仅可靠地小的拖曳力矩可传递。摩擦离合器例如构成为具有两个摩擦组的双离合器,其中优选地,相应的反压板由共同的中央板形成。在该处要注意的是,铰链执行器经由横杆操纵,其中例如旋转的电驱动机器连接于螺杆传动装置,所述电驱动机器使滑块状的横杆线性运动并且借助于与杠杆的斜坡状的连接强制至少一个操纵指沿着操纵路径运动。在一个优选的实施方式中,在操纵指处的操纵力在由横杆在接合位置和分离位置之间的运动得到的整个操纵路径上(几乎)恒定。
[0042]
在此提出的铰链执行器能够在特别小的结构空间上和低张力地安装,其中同时铰链执行器不那么复杂地构成并且可简单地安装。在双离合器中,例如设有在此提出的铰链执行器中的两个(例如彼此围绕旋转轴线转动的)。
[0043]
根据另一方面,提出一种动力总成,具有带有机器轴的至少一个驱动机器、至少一个消耗器和根据按照上面的描述的实施方式的扭矩离合器,其中机器轴借助于扭矩离合器
与至少一个消耗器可调节地以传递扭矩的方式连接。
[0044]
在此提出的动力总成包括根据上述描述的实施方式中的扭矩离合器,例如摩擦离合器,其中扭矩离合器借助于由根据按照上面的描述的实施方式的铰链执行器输出的施加到扭矩组例如摩擦组上的操纵力或压紧力,可切换地,即可松开地,实现扭矩从驱动机器或其机器轴传递到至少一个消耗器上,例如在机动车中传递到推进轮上。这绝不排除从消耗器到机器轴的相反的扭矩传递,在机动车中例如为了使用用于机动车减速的发动机制动和/或回收制动能量。驱动机器例如是内燃机和/或电驱动机器。在一个实施方式中,扭矩离合器的输入侧与机器轴以扭矩固定的方式连接并且输出侧(至少间接地,例如经由变速器)与至少一个消耗器扭矩固定地连接。
[0045]
在此提出的扭矩离合器对于如下动力总成是特别有利的,其中对于铰链执行器可用的结构空间小,并且优选地,在至少一个操纵指中的高的公差是必需的或出于成本原因是期望的。通过这里提出的铰链执行器中的低扭转刚度可以在没有高阻力的情况下补偿该公差。
[0046]
根据另一方面,提出一种机动车,具有至少一个推进轮,所述推进轮可借助于根据按照上面的描述的实施方式的动力总成驱动。
[0047]
结构空间刚好在机动车中由于部件的数量增加而尤其小,从而特别有利的是,使用较小的结构大小的动力总成。借助在降低运行转速的同时驱动机器的期望的所谓的精简,提高了进行干扰的扭振的强度,并且在扭矩增大或扭矩离合器减小时也提高对操纵力的要求。类似的问题在所谓的混合动力化中得出,其中电驱动机器越来越频繁地使用或者甚至形成主扭矩源并且使用尽可能小的内燃机,所述内燃机但是必须明显更频繁地接入动力总成并且再次断开。因此,在零件成本低并且可用的结构空间小的同时借助于铰链执行器提供足够的操纵力成为挑战。
[0048]
所述问题在根据欧洲分类的小型车等级的轿车中变得尖锐。在小型车等级的轿车中使用的机组相对于较大的车辆等级的轿车不明显减小。尽管如此,可供使用的构造空间在小型车中是极其小的。在此提出的动力总成对于如下机动车是特别有利的,其中对于铰链执行器可用的结构空间小,并且优选地在至少一个操纵指中的高的公差是必需的或者出于成本因素是期望的。通过这里提出的铰链执行器中的低扭转刚度可以在没有高阻力的情况下补偿该公差。
[0049]
轿车根据例如大小、价格、重量和功率与车辆等级相关联,其中所述定义根据市场需求持续转变。在美国市场中,小型车和微型车等级的车辆根据欧洲分类对应于次紧凑型车等级,而在英国市场其对应于超迷你等级或城市车等级。微型车等级的实例是大众的up!或雷诺的twingo。小型车等级的实例是阿尔法罗密欧的mito、大众的polo、福特的ka 或雷诺的clio。已知的混合动力车辆是宝马的330e或丰田的yaris hybrid。作为轻混合动力例如已知奥迪的a6 50tfsi e或宝马的x2 xdrive25e。
附图说明
[0050]
在上文中描述的发明在下文中在相关的技术背景下参照所附的附图详细阐述,附图示出优选的设计方案。本发明不由示意图以任何方式限制,其中要注意的是,附图不是符合比例的并且不适合于定义大小关系。在附图中示出:
[0051]
图1示出具有成角度的支承部段的铰链执行器的立体图;
[0052]
图2示出根据图1的铰链执行器的侧视图;
[0053]
图3示出根据图1的铰链执行器的立体剖面图;
[0054]
图4示出具有支承接片的铰链执行器的立体图;
[0055]
图5示出根据图4的铰链执行器的侧视图;
[0056]
图6示出根据图4的铰链执行器的剖面后视图;
[0057]
图7示出根据图4的铰链执行器的立体剖面图;以及
[0058]
图8示出机动车中的具有铰链执行器的动力总成。
具体实施方式
[0059]
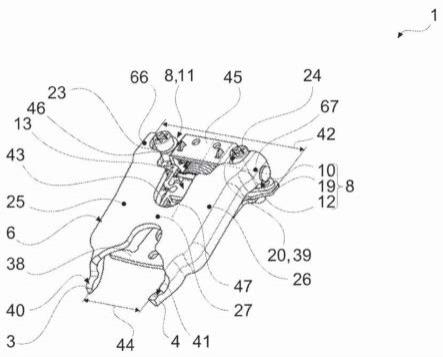
在图1中示出铰链执行器1的立体图。铰链执行器1在此(可选地)具有基板38,在所述基板上围绕由铰链支承件8限定的枢转轴线39可枢转地安装有具有主延伸7(参见图2)的杠杆6(可选地作为结构单元预安装),在此(可选地)借助于(根据视图)左侧的安装螺丝23和(根据视图)右侧的安装螺丝24。主延伸7在枢转轴线39和操纵指3、4的操纵面40、41之间限定(参见图2)。左侧和右侧在此和在其他地方仅涉及图1的视图角度。横向于主延伸7,铰链执行器1具有最大横向尺寸42,所述最大横向尺寸定义成在铰链支承件8中在基板38左侧和右侧之间的最大延伸。横杆13(或承载辊43)的线性运动导入到杠杆6中从而引起杠杆6(或主延伸7)围绕枢转轴线39的枢转。杠杆6在横杆13的(示出的)接合位置15中不输出操纵行程或输出最小的操纵行程(例如对于最小要求的轴向预紧)并且在(未示出的)分离位置14中经由(在此两个)与杠杆6连接的并且在杠杆6的主延伸7的延长部中设置的操纵指3、4输出最大操纵行程。左侧的操纵指3和右侧的操纵指4彼此借助指间距44(在操纵指3、4之间的例如用于轴的自由空间的尺寸)间隔开地设置。杠杆6在此处示出的实施方式中包括两个部分杠杆25、26。左侧的操纵指3与左侧的部分杠杆25并且右侧的操纵指4与右侧的部分杠杆26在一件式的延长部中沿着主延伸7形成。部分杠杆25、26借助于(在此唯一的)杠杆桥27一件式地彼此连接。所述(唯一的)杠杆桥27以(相对于根据图4至图7的在下文中描述的实施方式)距操纵指3、4沿主延伸7的方向大的间距设置,使得在操纵指3、4中实现足够小的扭转刚度,同时杠杆刚度是相对大的(由于成角度的支承部段66、67)。铰链支承件8在杠杆侧包括:具有左侧的栓容纳部18的成角度的左侧的支承部段66,在所述左侧的栓容纳部中在杠杆侧容纳有左侧的栓9;和具有右侧的栓容纳部19的成角度的右侧的支承部段67,在所述右侧的栓部段中在杠杆侧容纳有右侧的栓10。铰链支承件8在固定侧包括在其中在固定侧支承左侧的栓9的左侧的容纳元件11和在其中在右侧支承右侧的栓10的右侧的容纳元件12(参见图2)。在示出的实施方式中,得出栓轴线20和枢转轴线39的一致性。此外,可见弓形件45和横杆13连同承载辊43和具有螺杆轴线47的螺杆传动装置46(或其波纹管),其在下文中详细阐述。
[0060]
在图2中示出根据图1的铰链执行器1的侧视图。横杆13借助其(在此成对的)承载辊43在基板38上的支承件轨道48和在杠杆6的(关于操纵指3、4的操纵面40、41)背侧的杠杆轨道49之间设置。在此良好可见的是,横杆13处于接合位置15中并且承载辊43在借助于螺杆传动装置46沿着螺杆轴线47朝向表明的分离位置14移动时在支承件轨道48和倾斜于支承件轨道48定向的杠杆轨道49上滚动。借此,引起杠杆6或主延伸7围绕枢转轴线39的枢转。
借此,对于例如扭矩离合器2(参见图8)沿着操纵路径5以高的传动比产生操纵力50。此外,在该实施方式中,栓轴线20与铰链执行器1的枢转轴线39(根据视图垂直于绘图平面)一致。弓形件45在此(可选地)借助于至少一个圆形铆钉51在基板38上固定从而横杆13连同螺杆传动装置46固定。借助于定位销52(在此在图中可见地右侧的)栓容纳部19精确地定向,如关于根据图4至图7的实施方式阐述的那样。
[0061]
在图3中,示出根据图1的铰链执行器1的剖面图。在此可见铰链执行器1的承载辊43,所述承载辊在支承件轨道48和配合的杠杆轨道49上(参见图2)支撑并且在接合位置15(在此示出)和分离位置14之间移动。在此,杠杆桥27沿着主延伸7在接合位置14和分离位置15之间定位。在该实施方式中,由于借助于具有左侧的栓容纳部18和右侧的栓容纳部19的造型的接片实现的加固效果来实现相对高的杠杆刚度。
[0062]
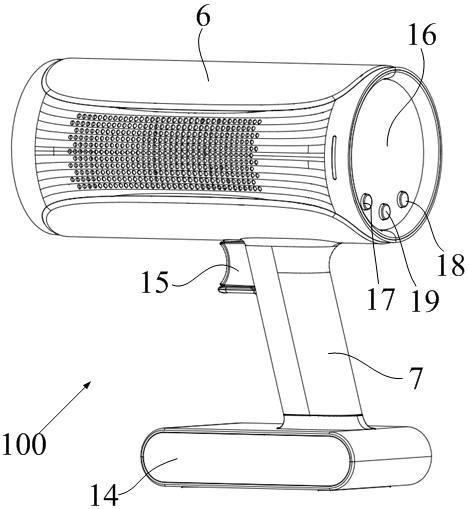
在图4中示出铰链执行器1的一个替选的实施方式的立体图。对此,关于铰链执行器1的功能参照前面的说明并且仅强调区别。最大横向尺寸42在此处于铰链支承件8中,其在此但是由容纳元件11、12确定。在该实施方式中,铰链支承件8在固定侧包括具有栓轴线20的左侧的栓9和在杠杆侧具有在左侧的支承接片21(根据视图在螺杆传动装置46的左侧)处的配合的左侧的栓容纳部18。对应地在右侧,铰链支承件8在固定侧具有带有栓轴线20的右侧的栓10和在杠杆侧具有在右侧的支承接片22处的配合的右侧的栓容纳部19。在示出的(理想的)实施方式中,栓轴线20彼此以及(可选地)与枢转轴线39一致。支承接片21、22沿着主延伸7远离操纵指3、4延伸,更确切地说在此(可选地)s形地延伸。栓容纳部18、19的构型在图5中进一步地阐述。在此同样地,左侧的操纵指3与左侧的部分杠杆25并且右侧的操纵指4与右侧的部分杠杆26在杠杆6的主延伸7的延长部中一件式形成。两个部分杠杆25、26借助于第一杠杆桥27和第二杠杆桥28一件式地彼此连接。第一杠杆桥27(与具有唯一的杠杆桥27的在上文中描述的实施方式相比)沿主延伸7的方向靠近操纵指3、4设置,并且第二杠杆桥28靠近铰链支承件8设置,使得在操纵指3、4中以及在铰链支承件8中,尽管(力求的)相对小的杠杆刚度(由于支承接片21、22),也不达到过小的扭转刚度。
[0063]
在图5中,根据图4中的替选的实施方式的铰链执行器1在此在类似于图2中的铰链执行器1的视图的侧视图中示出。就此而言参照对图4和图2的描述。根据视图,在该侧视图中,示出左侧的栓9连同在左侧的支承接片21处的配合的左侧的栓容纳部18,其中(可选地)右侧的栓10以及在右侧的支承接片22处的配合的右侧的栓容纳部19相同地构成。在此,左侧的支承接片21(s形地)大致沿主延伸7的方向可引入到铰链支承件8中,使得左侧的支承接片21处的左侧的栓容纳部18在左侧的栓9后方(即关于杠杆6的操纵路径5)设置。此外,在该实施方式中,栓轴线20与铰链执行器8的枢转轴线39一致地伸展(根据视图垂直于绘图平面)。弓形件45(可选地)借助于至少一个圆形铆钉51固定在基板38上,并且左侧的容纳元件11借助于定位销52相对于弓形件45和基板38定向。在左侧的容纳元件11中形成(左侧的)支承件容纳部16,在所述(左侧的)支承件容纳部处支承有(左侧的)栓9。借助于(左侧的)栓容纳部18,杠杆6围绕枢转轴线39可枢转地支承,以借助于(在此示出的左侧的)操纵面40施加操纵力50或沿着操纵路径5的操纵行程。对铰链执行器1的左侧的描述(可选地)同样适用于其右侧。
[0064]
在图6中,在剖面后视图中示出根据图4的铰链执行器1。在此,剖面线断开地伸展(在左侧的容纳元件11中的垂直的断开线65),使得在左侧的栓9中的剖平面(根据视图在右
侧)关于绘图平面比在右侧的栓10中的剖平面相比更靠前地设置。在此良好可见的是,左侧的栓9容纳在左侧的支承件容纳部16中,并且右侧的栓10容纳在右侧的支承件容纳部17中。此外,左侧的栓9和右侧的栓10为了侧向地固定杠杆6(经由支承接片21、22)分别具有内部凸肩53和外部凸肩54,其中以部分代表整体地,仅示出右侧的栓9处的凸肩53、54。与相应的容纳元件11、12和相关的支承接片21、22协作地,相关的栓9、10侧向地紧固。内部凸肩53和外部凸肩54(可选地)槽状地包围栓9、10的相应的支承面,其中支承面与支承接片21、22的相应的支承件容纳部18、19以传递力的方式接触。支承件容纳部16、17相对于弓形件45的位置借助于定位销52以及在相应的容纳元件11处形成的凸块55和弓形件45中的配合的凸块容纳部56固定。
[0065]
在图7中示出根据图4的铰链执行器1的剖面图。在此参照图3中的类似视图。
[0066]
在图8中在示意图中从上部示出动力总成30(可选地在驾驶室57之前并且可选地在横向设置中,即发动机轴线58横向于机动车37的纵轴线59)。左侧的推进轮35和右侧的推进轮36在此(可选地)由动力总成30驱动。动力总成30包括驱动机器33(在此作为三缸内燃机示出)以及与驱动机器33经由机器轴34耦联的扭矩离合器2。扭矩能够围绕转动轴线29或一致的马达轴线58借助于扭矩离合器2可分离地传递。对于可分离性,设有扭矩组31,所述扭矩组在此示例性地作为摩擦组构成,所述摩擦组具有压板60、借助离合器盖62以传递扭矩的方式与机器轴34连接的反压板61和轴向地在其之间设置的摩擦盘63,所述摩擦盘经由变速器(借助虚线示意地表明)与推进轮35、36以传递扭矩的方式连接。铰链执行器1的操纵力50在此经由在离合器盖62处支撑的杠杆弹簧64和操纵轴承32可传递到扭矩离合器2的扭矩组31上,从而扭矩组31可分离(常态闭合的配置)或可闭合(常态打开的配置)。
[0067]
借助在此提出的铰链执行器,可节约结构空间并且同时可明显降低成本。
[0068]
附图标记说明
[0069]1ꢀꢀꢀꢀ
铰链执行器
[0070]2ꢀꢀꢀꢀ
扭矩离合器
[0071]3ꢀꢀꢀꢀ
左侧的操纵指
[0072]4ꢀꢀꢀꢀ
右侧的操纵指
[0073]5ꢀꢀꢀꢀ
操纵路径
[0074]6ꢀꢀꢀꢀ
杠杆
[0075]7ꢀꢀꢀꢀ
主延伸
[0076]8ꢀꢀꢀꢀ
铰链支承件
[0077]9ꢀꢀꢀꢀ
左侧的栓
[0078]
10 右侧的栓
[0079]
11 左侧的容纳元件
[0080]
12 右侧的容纳元件
[0081]
13 横杆
[0082]
14 分离位置
[0083]
15 接合位置
[0084]
16 左侧的支承件容纳部
[0085]
17 右侧的支承件容纳部
[0086]
18 左侧的栓容纳部
[0087]
19
ꢀꢀ
右侧的栓容纳部
[0088]
20
ꢀꢀ
栓轴线
[0089]
21
ꢀꢀ
左侧的支承接片
[0090]
22
ꢀꢀ
右侧的支承接片
[0091]
23
ꢀꢀ
左侧的安装螺丝
[0092]
24
ꢀꢀ
右侧的安装螺丝
[0093]
25
ꢀꢀ
左侧的部分杠杆
[0094]
26
ꢀꢀ
右侧的部分杠杆
[0095]
27
ꢀꢀ
第一杠杆桥
[0096]
28
ꢀꢀ
第二杠杆桥
[0097]
29
ꢀꢀ
旋转轴线
[0098]
30
ꢀꢀ
动力总成
[0099]
31
ꢀꢀ
扭矩组
[0100]
32
ꢀꢀ
操纵轴承
[0101]
33
ꢀꢀ
驱动机器
[0102]
34
ꢀꢀ
机器轴
[0103]
35
ꢀꢀ
左侧的推进轮
[0104]
36
ꢀꢀ
右侧的推进轮
[0105]
37
ꢀꢀ
机动车
[0106]
38
ꢀꢀ
基板
[0107]
39
ꢀꢀ
枢转轴线
[0108]
40
ꢀꢀ
左侧的操纵面
[0109]
41
ꢀꢀ
右侧的操纵面
[0110]
42
ꢀꢀ
最大横向尺寸
[0111]
43
ꢀꢀ
承载辊
[0112]
44
ꢀꢀ
指间距
[0113]
45
ꢀꢀ
弓形件
[0114]
46
ꢀꢀ
螺杆传动装置
[0115]
47
ꢀꢀ
螺杆轴线
[0116]
48
ꢀꢀ
支承件轨道
[0117]
49
ꢀꢀ
杠杆轨道
[0118]
50
ꢀꢀ
操纵力
[0119]
51
ꢀꢀ
圆形铆钉
[0120]
52
ꢀꢀ
定位销
[0121]
53
ꢀꢀ
内部凸肩
[0122]
54
ꢀꢀ
外部凸肩
[0123]
55
ꢀꢀ
凸起
[0124]
56
ꢀꢀ
凸起容纳部
[0125]
57
ꢀꢀ
驾驶室
[0126]
58
ꢀꢀ
发动机轴线
[0127]
59
ꢀꢀ
纵轴线
[0128]
60
ꢀꢀ
压板
[0129]
61
ꢀꢀ
反压板
[0130]
62
ꢀꢀ
离合器盖
[0131]
63
ꢀꢀ
摩擦盘
[0132]
64
ꢀꢀ
杠杆弹簧
[0133]
65
ꢀꢀ
断开线
[0134]
66
ꢀꢀ
左侧的支承部段
[0135]
67
ꢀꢀ
右侧的支承部段
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。