技术特征:
1.一种用于借助数字计算机启用机器学习的微组装控制的方法,包括以下步骤:获得用于定位多个微对象中的一个或多个微对象的闭环系统的一个或多个参数,所述系统包括多个可编程电极,所述电极被配置为在致动所述电极之后在所述微对象接近所述电极时诱导所述微对象的移动,所述致动中的每个致动包括由所述电极中的一个或多个电极产生一个或多个电势;获得训练数据,所述训练数据包括与由于所述致动中的较早的致动引起的所述多个微对象中的一个或多个微对象的先前移动相关联的状态;定义用于预测在所述致动中的一个致动之后所述微对象中的至少一个微对象的位置的一个或多个基于物理的模型;经由梯度增强使用所述训练数据来构建用于预测在所述致动中的一个致动之后所述微对象中的至少一个微对象的位置的混合模型,所述混合模型包括多个模型,所述多个模型包括所述基于物理的模型中的一个或多个基于物理的模型和一个或多个机器学习模型;控制所述闭环系统,包括:基于至少一个传感器测量结果来预测在所述致动中的一个致动之后的所述微对象中的一个或多个微对象的位置;接收所述微对象中的一个或多个微对象的另一位置;以及使用所预测的位置和所述另一位置执行所述致动中的另一个致动,其中所述步骤由适当编程的计算机执行。2.根据权利要求1所述的方法,还包括:获得数据集;将所述数据集划分为所述训练数据和内插测试数据;外推所述先前移动的状态以生成外推数据;以及使用所述内插测试数据和所述外推数据测试所述混合模型。3.根据权利要求1所述的方法,其中所述梯度增强包括多个阶段,其中所述模型中的一个模型是在所述阶段中的每个阶段期间构建的,还包括:对于所述模型中的每个模型,使用损失函数来确定在基于所述训练数据的输入部分的所述一个模型的预测和与所述训练数据相关联的输出数据之间的残差;对于除了在所述阶段中的第一个阶段期间构建的所述模型以外的所述模型中的每个模型,使用与在构建所述模型的所述阶段之前的所述阶段期间构建的所述模型相关联的所述残差来定义所述模型。4.根据权利要求3所述的方法,还包括:选择用于针对基于与所述模型相关联的所述阶段的所述模型中的每个模型的随机模型来确定用于所述模型中的每个模型的所述残差的所述损失函数。5.根据权利要求4所述的方法,其中所述损失函数是去相关函数。6.根据权利要求5所述的方法,其中所述ljung-box损失函数用于为所述阶段中的至少一个阶段选择所述损失函数。7.根据权利要求5所述的方法,其中在所述第一阶段期间构建的所述模型是所述基于物理的模型中的一个基于物理的模型,并且在所述阶段中的最后一个阶段期间的所述模型是所述机器学习模型中的一个机器学习模型。
8.根据权利要求1所述的方法,其中一个或多个处理器定义递归神经网络。9.根据权利要求8所述的方法,其中所述机器学习模型包括线性模型、密集模型、深度模型和arima模型中的一者或多者。10.根据权利要求1所述的方法,其中所述计算机包括中央处理单元和图形处理单元中的至少一者。11.一种用于借助数字计算机启用机器学习的微组装控制的系统,包括:至少一个处理器,所述至少一个处理器被配置为:获得用于定位多个微对象中的一个或多个微对象的闭环系统的一个或多个参数,所述系统包括多个可编程电极,所述电极被配置为在致动所述电极之后在所述微对象接近所述电极时诱导所述微对象的移动,所述致动中的每个致动包括由所述电极中的一个或多个电极产生一个或多个电势;获得训练数据,所述训练数据包括与由于所述致动中的较早的致动引起的所述多个微对象中的一个或多个微对象的先前移动相关联的状态;定义用于预测在所述致动中的一个致动之后所述微对象中的至少一个微对象的位置的一个或多个基于物理的模型;经由梯度增强使用所述训练数据来构建用于预测在所述致动中的一个致动之后所述微对象中的至少一个微对象的位置的混合模型,所述混合模型包括多个模型,所述多个模型包括所述基于物理的模型中的一个或多个基于物理的模型和一个或多个机器学习模型;控制所述闭环系统,包括:基于至少一个传感器测量结果来预测在所述致动中的一个致动之后的所述微对象中的一个或多个微对象的位置;接收所述微对象中的一个或多个微对象的另一位置;以及使用所预测的位置和所述另一位置执行所述致动中的另一个致动。12.根据权利要求11所述的系统,所述至少一个处理器还被配置为:获得数据集;将所述数据集划分为所述训练数据和内插测试数据;外推所述先前移动的状态以生成外推数据;以及使用所述内插测试数据和所述外推数据测试所述混合模型。13.根据权利要求11所述的系统,其中所述梯度增强包括多个阶段,其中所述模型中的一个模型是在所述阶段中的每个阶段期间构建的,所述至少一个处理器还被配置为:对于所述模型中的每个模型,使用损失函数来确定在基于所述训练数据的输入部分的所述一个模型的预测和与所述训练数据相关联的输出数据之间的残差;对于除了在所述阶段中的第一个阶段期间构建的所述模型以外的所述模型中的每个模型,使用与在构建所述模型的所述阶段之前的所述阶段期间构建的所述模型相关联的所述残差来定义所述模型。14.根据权利要求13所述的系统,所述至少一个处理器还被配置为:选择用于针对基于与所述模型相关联的所述阶段的所述模型中的每个模型的随机模型来确定用于所述模型中的每个模型的所述残差的所述损失函数。15.根据权利要求14所述的系统,其中所述损失函数是去相关函数。
16.根据权利要求15所述的系统,其中所述ljung-box损失函数用于为所述阶段中的至少一个阶段选择所述损失函数。17.根据权利要求15所述的系统,其中在所述第一阶段期间构建的所述模型是所述基于物理的模型中的一个基于物理的模型,并且在所述阶段中的最后一个阶段期间的所述模型是所述机器学习模型中的一个机器学习模型。18.根据权利要求11所述的系统,其中所述一个或多个处理器定义递归神经网络。19.根据权利要求18所述的系统,其中所述机器学习模型包括线性模型、密集模型、深度模型和arima模型中的一者或多者。20.根据权利要求11所述的系统,其中所述至少一个处理器是中央处理单元和图形处理单元中的至少一者。
技术总结
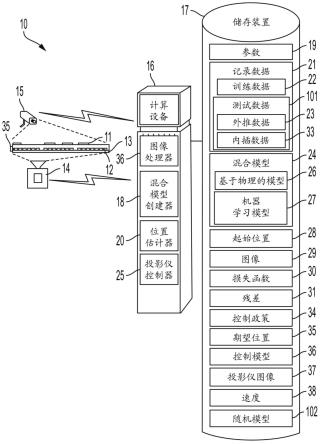
本发明题为“用于借助数字计算机在微组装控制中使用的基于机器学习的位置估计的系统和方法”。可通过使用包括至少一个基于物理的模型和机器学习模型两者的混合模型来考虑控制回路延迟以预测被移动的微对象的位置。使用梯度增强组合该模型,其中模型是在基于在先前阶段基于与训练数据的比较计算的残差拟合的阶段中的至少一个阶段期间创建的。基于创建的模型选择针对每个阶段的损失函数。用从训练数据外推和内插的数据来评估混合模型,以防止过度拟合并且确保混合模型具有足够的预测能力。通过包括基于物理的模型和机器学习模型两者,该混合模型可以考虑在微对象的移动中涉及的确定性分量和随机分量两者,从而增加微组装的准确性和吞吐量。准确性和吞吐量。准确性和吞吐量。
技术研发人员:A
受保护的技术使用者:帕洛阿尔托研究中心公司
技术研发日:2022.04.25
技术公布日:2022/11/22
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。