1.本实用新型涉及钢筋桁架楼承板生产技术领域,尤其是涉及一种钢筋桁架楼承板码垛设备。
背景技术:
2.钢筋桁架楼承板属于一种无支撑压型组合楼承板,其包括底板和焊接在底板上的钢筋桁架,钢筋桁架又主要包括上弦钢筋、下弦钢筋以及腹杆钢筋,三者通过焊接形成上述钢筋桁架楼承板。
3.在钢筋桁架楼承板焊接成型后,需要将其进行码垛,通常是采用正反方式叠放钢筋桁架楼承板,在授权公告号为cn214651152u的专利中提供一种钢筋桁架楼承板码垛装置,该装置使用时,首先,需要码垛的钢筋桁架楼承板从上游生产线焊接完成后沿上游辊筒进入支撑机构和输送机构,通过输送电机输出轴端设置的链轮链条带动钢筋桁架楼承板沿辊筒移动至卸料位置后停止,平移电机通过其输出轴轴端的链轮链条带动平移长轴转动,进而带动垂直门架上的平移小车移动,将钢筋桁架楼承板推至支撑机构卸料侧的升降机构的升降平台上,平移小车退回至平移长轴一侧的初始位置;然后,后续的钢筋桁架楼承板再移动至卸料位置后停止,对应位置的支撑机构上的翻转机构的夹紧气缸启动,夹紧气缸推动翻转杆两端的夹紧块将钢筋桁架楼承板加紧,翻转电机带动翻转长轴转动,进而翻转长轴上的翻转臂转动,将后续的钢筋桁架楼承板与第一块钢筋桁架楼承板扣合;最后,在码垛过程中通过驱动电机调整升降机构的升降平台高度,依次按照平推-翻转操作进行码垛,当达到码垛高度后,将升降机构上的钢筋桁架楼承板捆扎吊转现有码垛。
4.现有技术中存在的问题是:钢筋桁架楼承板的码垛高度受限于输送装置(等同于引用文件中的“输送机构”)的高度,其最高是和输送装置的高度等高,一般在85cm-93cm,倘若要提高码垛高度,只能提高输送装置的高度,则上一道焊接钢筋桁架楼承板设备的工作台高度也需要对应提高,这样会大大提高流水线成本且极为复杂。
技术实现要素:
5.为了解决以上技术问题,本实用新型提供一种钢筋桁架楼承板码垛设备,突破了输送装置高度对码垛高度的限制,保证了输送装置与流水线工作台等高的前提下,提高了码垛高度,提高了码垛效率,降低了设备成本。
6.为了达到上述目的,本实用新型采用的一种钢筋桁架楼承板码垛设备包括:至少一个翻转装置,翻转装置包括翻转主轴、翻料架、抓取部件、加高架和主轴支架;翻料架通过抓取部件抓取及释放钢筋桁架楼承板;翻料架平行于钢筋桁架楼承板的宽度方向设置,翻转主轴平行于钢筋桁架楼承板的长度方向设置,翻转主轴在竖直方向上高于翻料架,翻料架通过加高架与翻转主轴固连;翻转主轴设置在主轴支架上,翻转主轴通过轴承与主轴支架转动连接,翻料架抓取固定住钢筋桁架楼承板随翻转主轴翻转180
°
左右。
7.此技术方案将现有技术中翻转装置的回转中心与被翻转的钢筋桁架楼承板同高
改为高于钢筋桁架楼承板,通过在翻转主轴和翻料架之间加设加高架来提高翻料架的回转半径,使得翻转装置翻转后与初始位置产生高度上的位移,并且在结构上是增加了加高架的高度,而在反转后翻料架是提高了加高架高度2倍的位移,通过增加加高架的高度实现了行程双倍的提高,结构巧妙简单且成本低。
8.通过采用上述技术方案,实现了钢筋桁架楼承板的码垛高度不再受到输送装置高度的限制,只需要增加加高架在竖直方向的高度就可以了,现在的码垛高度可以达到120cm以上,如果再加装一个二次托举装置,码垛高度可以达到140cm以上,本技术方案同时提高了码垛效率,每张钢筋桁架楼承板的码垛时间在10s左右,而且不需要调高生产线上一道生产工序的工作台来适应,实现了设备的标准化及通用性,节省了设备成本,其中翻料架随翻转主轴旋转180
°
左右的技术方案结构简单且可靠,也实现了降低成本的有益效果。
9.作为优选,抓取部件包括两个夹爪,两个夹爪分别位于翻料架的近两端处,两个夹爪沿翻料架相对或相向滑动,夹爪通过气缸或油缸控制。
10.通过采用此技术方案,实现了翻转装置对钢筋桁架楼承板的可靠夹紧,同时,采用两个夹爪抓放钢筋桁架楼承板这种对中夹紧的方式,这样设计便于控制和调节钢筋桁架楼承板在翻料架上的位置,进而保证翻转钢筋桁架楼承板与前一块板在叠放时交错放置,以保证码垛的稳定性,同时也保证了最高的空间利用率。
11.作为优选,翻转装置通过链传动或同步带传动控制翻转主轴旋转,翻转装置内设置有接近开关一和接近开关二,接近开关一限定翻转装置翻转的极限位置,接近开关二限定翻转装置工作完成后返回的极限位置。
12.通过采用此技术方案,实现了翻转装置的自动化控制。
13.作为优选,还包括输送装置,输送装置与上一道工序的工作台同高,输送装置包括输送支架和横担在输送支架上的多个输送辊轮,多个输送辊轮通过传动链和链轮传动,翻转装置设置在多个输送辊轮之间,翻转装置与输送辊轮平行设置,翻料架低于或等于输送辊轮的高度,输送辊轮最高点位于抓取部件的抓取范围内,主轴支架固设在输送支架的一条侧边上;输送支架上设置有接近开关三,接近开关三限定钢筋桁架楼承板在输送装置上的预设位置。
14.通过采用此技术方案,保证了输送装置与上一道工序的工作台同高,实现了设备的通用性和标准化;同时翻转装置位置的设置实现了对翻转的钢筋桁架楼承板的抓紧的可靠性。
15.作为优选,还包括多个托举装置,多个托举装置平行于输送辊轮设置,且由输送辊轮间隔开,多个托举装置与输送支架内侧面滑动连接,托举装置通过油缸或气缸控制升降;托举装置包括横杆和两个竖杆,竖杆固连在横杆两端,输送支架宽度方向上的两内侧均固设有导向槽,两个导向槽与两个竖杆相适配,每个导向槽两侧面上均设置有牛眼轴承,牛眼轴承与竖杆接近导向槽侧面的两侧面滚动接触,导向槽两侧面上均设置有轴承,轴承与竖杆的远离输送支架的侧面滚动接触;托举装置与油缸或者气缸的伸缩杆通过鱼眼接头连接。
16.通过采用此技术方案,实现了对钢筋桁架楼承板的托举,以配合下一块翻转的钢筋桁架楼承板的高度,达到提高码垛高度的有益效果;导向槽保证了托举装置的安全可靠性,牛眼轴承和轴承的设置,降低了托举装置在上升过程中受到的摩擦阻力,鱼眼接头的设
置实现了托举支架与伸缩杆的可转动的连接,避免了伸缩杆受到阻力,提高了托举装置的使用寿命。
17.作为优选,还包括多个推移装置,推移装置包括第一推移部件;每个第一推移部件对应固设于每个横杆的侧面,第一推移部件上设置有推板一,推板一通过油缸或气缸控制其移动。
18.通过采用此技术方案,推移装置将钢筋桁架楼承板水平推移至升降装置上。
19.作为优选,推移装置还包括第二推移部件和多个第二推移部件支架,每个第二推移部件固设在对应的第二推移部件支架上,每个第二推移部件支架并排固设在输送支架一侧,且与主轴支架同侧,第二推移部件的安装位置等于或低于第一推移部件,第二推移部件上设置有推板二,推板二通过油缸或气缸控制其移动。
20.本技术方案中,由于第一推移部件不能将钢筋桁架楼承板一步推到位,所以,在同第一推移部件的高度位置上加装了第二推移部件,本方案中第二推移部件安装在第二推移部件支架上,油缸或气缸选用无杆的,实现了经过两步推移将钢筋桁架楼承板推移到升降装置上,推移动作稳定、快速、可靠。
21.作为优选,推移装置还包括第二推移部件,每个第二推移部件固设于每个横杆的另一侧面,第二推移部件上设置有推板二,推板二通过油缸或气缸控制其移动。
22.本方案中第二推移部件安装在托举装置的横杆上,油缸或气缸选用有杆的,实现了经过两步推移将钢筋桁架楼承板推移到升降装置上,推移动作稳定、快速、可靠。
23.作为优选,还包括升降装置,升降装置位于输送支架的一侧,且与主轴支架同侧;升降装置包括多个竖直支架、多个升降料架和升降传动轴,多个竖直支架平行竖直固设在输送支架一侧,且与主轴支架同侧,升降传动轴与多个升降料架通过轴承转动连接,升降传动轴上固设有多个齿轮,每个齿轮分别啮合有一个齿条,多个齿条对应固设在竖直支架远离输送装置的侧面上,每个升降料架通过齿轮齿条传动与竖直支架滑动连接,升降传动轴传动连接有电机和减速机。
24.作为优选,升降料架远离输送支架的一端高于另一端。
25.通过采用此技术方案,实现了稳定可靠的升降动作,以支撑钢筋桁架楼承板下降,从而达到所需码垛高度的要求;升降料架远离输送支架的一端高于另一端是为了第一次推移结束后,钢筋桁架楼承板在部分进入升降装置上时,在这个高度差及自重的作用下,会使其受力端略低于第二推移部件的推板二,以方便第二推移部件推动其完全到位,略带坡度的设计也可以有效避免码垛好的钢筋桁架楼承板在升降装置上掉落。
26.综上所述,本实用新型具有如下的有益技术效果:
27.1.通过改变码垛方法,并通过设置翻转装置和托举装置,实现了钢筋桁架楼承板的码垛高度不再受到输送装置高度的限制,提升了码垛高度,现在的码垛高度可以达到120cm以上,如果再加装一个二次托举装置,码垛高度可以达到140cm以上;同时提高了码垛效率,每张钢筋桁架楼承板的码垛时间在10s左右;而且不需要调高生产线上一道生产工序的工作台来适应,实现了设备的标准化及通用性,节省了设备成本。
28.2.翻转装置的设置实现了只需要提高翻转装置的回转半径即可提升码垛高度,其中加高架的长度即为回转半径,则实际的提高的码垛高度为所述加高架长度的2倍,所以本技术方案通过增加一个加高架实现了行程双倍的提高,结构巧妙简单且成本低,其中翻料
架随翻转主轴旋转180
°
左右的技术方案结构简单且可靠,也实现了降低成本的有益效果。
29.3.导向槽的设置保证了托举装置的安全可靠性,牛眼轴承和轴承的设置,降低了托举装置在上升过程中受到的摩擦阻力,鱼眼接头的设置实现了托举装置与伸缩杆的可转动的连接,避免了伸缩杆在伸缩时受到阻力而损坏气缸或油缸,提高了托举装置的使用寿命。
附图说明
30.图1是实施例1钢筋桁架楼承板码垛托举推移过程示意图;
31.图2是实施例1钢筋桁架楼承板码垛翻转示意图;
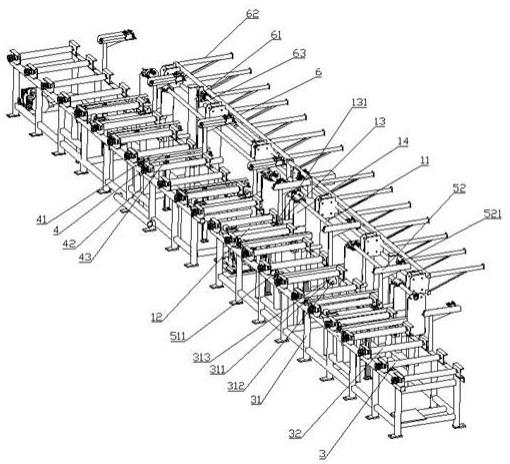
32.图3是钢筋桁架楼承板码垛设备示意图;
33.图4是托举装置示意图;
34.图5是导向槽示意图;
35.图6是实施例2中的升降装置示意图;
36.图7是实施例2中的托举装置和推移装置示意图。
37.附图标记说明:1-翻转装置;11-翻转主轴;12-翻料架;13-抓取部件;131-夹爪;
38.14-加高架;15-主轴支架;
39.2-钢筋桁架楼承板;3-输送装置;31-输送支架;311-导向槽;312-牛眼轴承;313-轴承;
40.32-输送辊轮;
41.4-托举装置;41-横杆;42-竖杆;43-鱼眼接头;
42.5-推移装置;51-第一推移部件;511-推板一;
43.52-第二推移部件;521-推板二;
44.6-升降装置;61-竖直支架;62-升降料架;63-升降传动轴。
具体实施方式
45.以下结合附图对本实用新型作进一步详细说明。
46.实施例1
47.本实施例公开一种钢筋桁架楼承板码垛设备,参照图2-3,包括四个翻转装置1,翻转装置1包括翻转主轴11、翻料架12、抓取部件13、加高架14和主轴支架15;翻料架12通过抓取部件13抓取及释放钢筋桁架楼承板2;翻料架12平行于被抓取的钢筋桁架楼承板2的宽度方向设置,翻转主轴11平行于被抓取的钢筋桁架楼承板2的长度方向设置,翻转主轴11在竖直方向上高于翻料架12,翻料架12通过加高架14与翻转主轴11固连;翻转主轴11设置在主轴支架15上,翻转主轴11通过轴承与主轴支架15转动连接,翻料架12抓取固定住钢筋桁架楼承板2随翻转主轴11翻转。
48.参照图2-3,每个抓取部件13包括两个夹爪131,两个夹爪131分别位于翻料架12的近两端处,两个夹爪131沿翻料架12相对或相向滑动,以抓放钢筋桁架楼承板2,夹爪131通过气缸或油缸控制。翻转装置1通过链传动控制翻转主轴11旋转,翻转装置1内设置有接近开关一和接近开关二,接近开关一限定翻转装置1翻转的极限位置,接近开关二限定翻转装置1工作完成后返回的极限位置。
49.参照图1和图3,包括输送装置3,输送装置3与上一道工序的工作台同高,输送装置3包括输送支架31和横担在输送支架31上的二十四个输送辊轮32,二十四个输送辊轮32通过传动链和链轮传动,四个翻转装置1间隔设置在二十四个输送辊轮32之间,翻转装置1与输送辊轮32平行设置,翻料架12低于输送辊轮32的高度,输送辊轮32最高点位于抓取部件13的抓取范围内,主轴支架15固设在输送支架31的一条侧边上;输送支架31上设置有接近开关三,接近开关三限定被输送钢筋桁架楼承板2在输送装置3上的预设位置。
50.参照图1和图3,还包括八个托举装置4,八个托举装置4平行于输送辊轮32设置,且由输送辊轮32间隔开,每个托举装置4与输送支架31内侧面滑动连接,托举装置4通过气缸控制升降;
51.参照图4-5,托举装置4包括横杆41和两个竖杆42,竖杆42固连在横杆41两端,输送支架31宽度方向上的两内侧均固设有导向槽311,两个导向槽311与两个竖杆42相适配,每个导向槽311两侧面上均设置有牛眼轴承312,牛眼轴承312与竖杆42接近导向槽311侧面的两侧面滚动接触,导向槽311两侧面上均设置有轴承313,轴承313与竖杆42的远离输送支架31的侧面滚动接触;托举装置4与油缸或者气缸的伸缩杆通过鱼眼接头43连接。
52.参照图1和图3,本设备还包括八个推移装置5,推移装置5包括第一推移部件51;每个第一推移部件51对应固设于每个横杆41的侧面,第一推移部件51上设置有推板一511,推板一511通过无杆气缸控制其移动。
53.参照图1和图3,推移装置5还包括八个第二推移部件52和八个第二推移部件支架53,每个第二推移部件52固设在对应的第二推移部件支架53上,每个第二推移部件支架53并排固设在输送支架31一侧,且与主轴支架15同侧,第二推移部件52的安装位置等于或低于第一推移部件51,第二推移部件52上设置有推板二521,推板二521通过油缸或气缸控制其移动。
54.参照图1、图2和图3,还包括升降装置6,升降装置6位于输送支架31的一侧,且与主轴支架15同侧;升降装置6包括六个竖直支架61、十四个升降料架62和升降传动轴63,六个竖直支架61平行竖直固设在输送支架31一侧,且与主轴支架15同侧,升降传动轴63与十四个升降料架62通过轴承转动连接,升降传动轴63上固设有四个齿轮,每个齿轮分别啮合有一个齿条,四个齿条对应固设在竖直支架61远离输送装置3的侧面上,每个升降料架62通过齿轮齿条传动与竖直支架61滑动连接,升降传动轴63传动连接有电机和减速机。
55.实施例2
56.本实施例与实施例1的不同之处在于:第二推移部件52的安装方式,去掉了第二推移部件支架53;
57.参照图6,推移装置5包括第二推移部件52,每个第二推移部件52固设于每个横杆41的另一侧面,第二推移部件52上设置有推板二521,推板二521通过有杆气缸控制其移动。
58.另外,升降料架62远离输送支架31的一端高于另一端,在第一次推移结束后,钢筋桁架楼承板2在部分进入升降装置6上时,在这个高度差及自重的作用下,会使其受力端略低于第二推移部件52的推板二521,以方便第二推移部件52推动其完全到位,略带坡度的设计也可以有效避免码垛好的钢筋桁架楼承板2在升降装置6上掉落。
59.以上两个实施例的工作步骤及原理相同,包括以下步骤:
60.s1.上料:钢筋桁架楼承板2由输送装置3沿x轴方向传送至预设位置,钢筋桁架楼
承板2到达指定位置后发送信号,判断是第奇数块还是第偶数块,如果是第奇数块则进行s2操作,如果是第偶数块则进行s4操作;
61.s2.托举:第奇数块钢筋桁架楼承板2由托举装置4沿y轴方向托举到与升降装置6同高的位置;
62.s3.推移:第奇数块钢筋桁架楼承板2由推移装置5沿z轴方向推移到升降装置6上,完成后,推移装置5返回原位,托举装置4返回原位,再重复s1操作;
63.s4.翻转:第偶数块钢筋桁架楼承板2由翻转装置1翻转到前一个第奇数块钢筋桁架楼承板2上;第偶数块钢筋桁架楼承板2翻转后产生的高度位移等于两倍的翻转装置1的回转半径值。
64.s5.下降:位于升降装置6上的钢筋桁架楼承板2随升降装置6沿y轴方向下降,此时,最上面的第偶数块钢筋桁架楼承板2的底模架所在的位置与托举装置的预设极限位置等高;
65.s6.在升降装置6下降的同时,翻转装置1回到原位;再重复s1操作,直至钢筋桁架楼承板2的码垛高度达到预设高度结束。
66.以上,仅是本实用新型的较佳实施例而已,并非是对本实用新型作其他形式的限制,任何熟悉本专业的技术人员可能利用上述揭示的技术内容加以变更或改型为等同变化的等效实施例应用于其他领域,但是凡是未脱离本实用新型技术方案内容,依据本实用新型的技术实质对以上实施例所作的任何简单修改、等同变化,仍属于本实用新型技术方案的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
