1.本技术涉及机械驱动技术领域,特别是涉及一种柔性联动器和柔性驱动机构。
背景技术:
2.伴随着机器人技术的不断完善,市面上已经涌现了众多物理治疗机器人,且不同物理治疗机器人提供不同治疗的核心来自于前端的物理治疗执行器,如提供软组织治疗的机器人、提供热疗的机器人及提供艾灸的机器人等。现有的软组织物理治疗执行器不仅能够通过提供力控来实现机器人与人体接触时力的控制,而且还能够采用特殊的执行机构设计来实现仿人手的指揉动作,受到了人们的普遍欢迎。
3.然而,现有的软组织物理治疗执行器通常采用刚性驱动,即驱动部件与执行机构直接刚性地连接在一起,导致力量控制和运动控制只能被分开设计,造成执行机构的设计变得复杂和冗余。此外,刚性驱动方式还容易产生噪声及振动,严重影响用户的治疗体验。
技术实现要素:
4.基于此,有必要提供一种能够实现柔性力控的柔性联动器和柔性驱动机构,以便兼顾执行器的力量控制和运动控制。
5.根据本技术的一个实施例,本技术提供了一种柔性联动器,包括:
6.输入连接件;
7.输出连接件;以及
8.弹性组件,所述弹性组件被设置于所述输入连接件和所述输出连接件之间,其中当所述输入连接件被驱动以动作时,所述弹性组件在所述输入连接件的带动下发生弹性形变以带动所述输出连接件,用于通过所述弹性组件的形变量测算出输出力。
9.在本技术的一个实施例中,所述弹性组件包括与所述输入连接件和所述输出连接件连接的旋转扭簧或平面弹簧。
10.在本技术的一个实施例中,所述弹性组件包括第一扭簧、第二扭簧以及与所述第一扭簧和所述第二扭簧串联的中间连接件,所述第一扭簧的两端分别固定连接于所述输入连接件和所述中间连接件,所述第二扭簧的两端分别固定连接于所述输出连接件和所述中间连接件。
11.在本技术的一个实施例中,所述输入连接件、所述中间连接件以及所述输出连接件依次被可转动地同轴布置,所述第一扭簧被套设于所述输入连接件和所述中间连接件之间的轴上,所述第二扭簧被套设于所述中间连接件和所述输出连接件之间的轴上。
12.在本技术的一个实施例中,所述中间连接件具有朝向所述输入连接件的第一扭簧腔和朝向所述输出连接件的第二扭簧腔,以通过所述输入连接件将所述第一扭簧封装在所述第一扭簧腔之内,并通过所述输出连接件将所述第二扭簧封装在所述第二扭簧腔之内。
13.在本技术的一个实施例中,所述中间连接件中的所述第一扭簧腔和所述第二扭簧腔均为环形腔,所述第一扭簧和所述第二扭簧分别被对应地套装于所述第一扭簧腔和所述
第二扭簧腔之内。
14.在本技术的一个实施例中,所述弹性组件进一步包括第一滑接件和第二滑接件,所述第一滑接件被设置于所述中间连接件和所述输入连接件之间,用于将所述中间连接件可滑动地连接于所述输入连接件;所述第二滑接件被设置于所述中间连接件和所述输出连接件之间,用于将所述输出连接件可滑动地连接于所述中间连接件。
15.在本技术的一个实施例中,所述柔性联动器进一步包括传感器组件,所述传感器组件被设置用于检测所述输出连接件与所述输入连接件之间的运动差值,以获得所述弹性组件的形变量。
16.根据本技术的另一方面,本技术进一步提供了一种柔性驱动机构,用于驱动执行机构,所述柔性驱动机构包括:
17.驱动部件;和
18.上述任一所述的柔性联动器,所述柔性联动器的输入连接件连接于所述驱动部件,所述柔性联动器的输出连接件用于连接该执行机构,以将所述驱动部件与该执行机构进行柔性联动。
19.在本技术的一个实施例中,所述驱动部件为旋转电机或直线电机。
20.在本技术的一个实施例中,所述柔性驱动机构进一步包括传动器,所述传动器用于被可传动地设置于所述柔性联动器和该执行机构之间,以将经由所述柔性联动器输出的运动和力矩转向地传递给该执行机构。
21.在本技术的一个实施例中,所述柔性联动器的传感器组件包括分别被内置于所述驱动部件和所述传动器的角度传感器,用于获得所述柔性联动器的输入角度和输出角度,以计算出所述柔性联动器所产生的力矩。
22.综上所述,本技术的所述柔性联动器和柔性驱动机构一方面因自身固有的柔性而能够减少刚体碰撞所导致的危险;另一方面因自身的弹性形变量与所受到的驱动力大小相关而能够通过控制弹性形变量来实现驱动力大小的控制,从而通过运动控制(位置控制)来实现力量控制,有助于简化控制难度,提高控制稳定性。
附图说明
23.为了更清楚地说明本技术实施例或传统技术中的技术方案,下面将对实施例或传统技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅是本技术的一些实施例,对于本领域普通技术人员而言,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
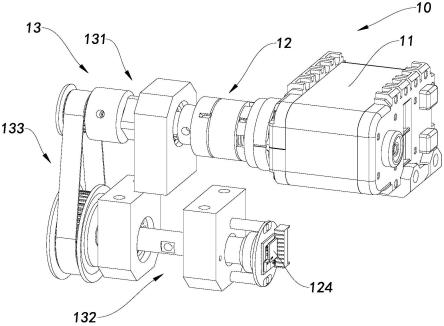
24.图1为本技术的一个实施例提供的柔性驱动机构的立体示意图;
25.图2示出了根据本技术的上述实施例的柔性驱动机构的应用示意图;
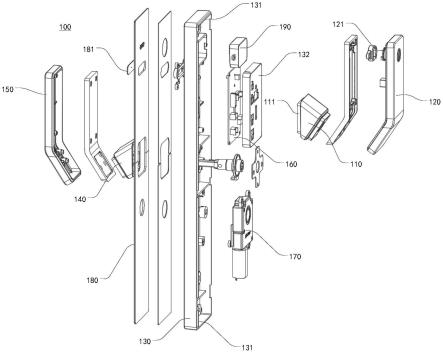
26.图3示出了根据本技术的上述实施例的柔性驱动机构的爆炸示意图;
27.图4示出了根据本技术的上述实施例的柔性驱动机构中柔性联动器的立体示意图;
28.图5示出了根据本技术的上述实施例的柔性联动器的爆炸示意图;
29.图6示出了根据本技术的上述实施例的柔性驱动机构中传动器的立体示意图;
30.图7示出了根据本技术的上述实施例的传动器的爆炸示意图;
31.图8示出了根据本技术的上述实施例的柔性联动器的一个变形示例;
32.图9示出了根据本技术的上述实施例的柔性联动器的一个应用示例。
33.附图标记:10、柔性驱动机构;11、驱动部件;110、旋转电机;12、柔性联动器;121、输入连接件;122、输出连接件;123、弹性组件;1230、旋转扭簧;1231、第一扭簧;1232、第二扭簧;1233、中间连接件;12331、第一扭簧腔;12332、第二扭簧腔;1234、第一滑接件;1235、第二滑接件;124、传感器组件;1240、角度传感器;13、传动器;131、输入轴组件;1311、输入轴;1312、输入轴承座;1313、输入轴承挡圈;1314、锁紧螺母;132、输出轴组件;1321、输出轴;1322、第一输出轴承座;1323、输出轴承挡圈;1324、第二输出轴承座;133、皮带传动组件;1331、输入皮带轮;1332、输出皮带轮;1333、传动皮带;20、执行机构。
具体实施方式
34.为使本技术的上述目的、特征和优点能够更加明显易懂,下面结合附图对本技术的具体实施方式做详细的说明。在下面的描述中阐述了很多具体细节以便于充分理解本技术。但是本技术能够以很多不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本技术内涵的情况下做类似改进,因此本技术不受下面公开的具体实施例的限制。
35.需要说明的是,当组件被称为“固定于”或“设置于”另一个组件,它可以直接在另一个组件上或者也可以存在居中的组件。当一个组件被认为是“连接”另一个组件,它可以是直接连接到另一个组件或者可能同时存在居中组件。本技术的说明书所使用的术语“垂直的”、“水平的”、“上”、“下”、“左”、“右”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式。
36.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本技术的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
37.在本技术中,除非另有明确的规定和限定,第一特征在第二特征“上”、“下”可以是第一特征直接和第二特征接触,或第一特征和第二特征间接地通过中间媒介接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅表示第一特征水平高度小于第二特征。
38.除非另有定义,本技术的说明书所使用的所有的技术和科学术语与属于本技术的技术领域的技术人员通常理解的含义相同。在本技术的说明书中所使用的术语只是为了描述具体的实施方式的目的,不是旨在于限制本技术。本技术的说明书所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
39.考虑到现有的刚性驱动方式不仅会导致力量控制和运动控制只能被分开设计,造成执行机构的设计变得复杂和冗余;而且还容易产生噪声及振动,严重影响用户的治疗体验。为了解决这一问题,本技术提供了一种柔性联动器和柔性驱动机构,其能够实现柔性力控,以便兼顾执行机构的力量控制和运动控制。
40.具体地,请参考附图1至图7,本技术的一个实施例提供了一种柔性驱动机构10,可以包括驱动部件11和柔性联动器12,该柔性联动器12用于将该驱动部件11与执行机构20联
动,以驱动该执行机构20执行所需的治疗动作,从而实现柔性力控,以便兼顾该执行机构20的力量控制和运动控制。
41.更具体地,如图2、图4以及图5所示,该柔性联动器12可以包括用于与该驱动部件11连接的输入连接件121、用于与该执行机构20连接的输出连接件122以及被设置于该输入连接件121和该输出连接件122之间的弹性组件123,其中当该驱动部件11被启动以驱动该输入连接件121动作时,该弹性组件123在该输入连接件121的带动下发生弹性形变以带动该输出连接件122,用于通过该弹性组件123的形变量测算出输出力;与此同时,该柔性联动器12将该驱动部件11与该执行机构20进行柔性联动,使得该执行机构20能够被该柔性驱动机构10驱动,以执行所需的治疗动作。
42.值得注意的是,一方面该柔性驱动机构10中的该弹性组件123因自身固有的柔性而能够减少刚体碰撞所导致的危险;另一方面,该柔性驱动机构10中的该弹性组件123因自身的弹性形变量与所受到的驱动力大小相关而能够通过控制该弹性组件123的形变量来实现驱动力大小的控制,从而通过运动控制(位置控制)来实现力量控制,有助于简化控制难度,提高控制稳定性。
43.根据本技术的上述实施例,如图1和图3所示,该柔性驱动机构10中的该驱动部件11可以但不限于被实施为旋转电机110,用于驱动该柔性联动器12的该输入连接件121转动,以输出旋转角度、角速度以及力矩,使得该柔性联动器12将输出角度、输出角速度以及输出力矩传递给该执行机构20,以执行所需的治疗动作。可以理解的是,在本技术的其他实施例中,该驱动部件11也可以被实施为直线电机,用于驱动该柔性联动器12的该输入连接件121移动,以输出线性位移、线性速度以及驱动力,使得该柔性联动器12将输出位移、输出速度以及输出力传递给该执行机构20,也可以执行所需的治疗动作,本技术对此不再赘述。
44.在本技术的上述实施例中,如图4和图5所示,该柔性联动器12中的该弹性组件123可以包括与该输入连接件121和该输出连接件122连接的一或多个旋转扭簧1230,以便通过该旋转扭簧1230的形变角度,来计算出该弹性组件123所产生的扭转力矩,进而获得该柔性驱动机构10的输出力矩,便于兼顾该执行机构20的力量控制和运动控制。可以理解的是,在本技术的其他实施例中,该弹性组件123也可以包括其他类型的一或多个平面弹簧,或者诸如弹性管、弹性片、弹性杆或弹性条等其他能以产生平面扭矩为主的弹性装置,只要能够通过形变量来计算出输出力即可,本技术对此不再赘述。
45.示例性地,如图4和图5所示,该弹性组件123可以包括第一扭簧1231、第二扭簧1232以及与该第一扭簧1231和该第二扭簧1232串联的中间连接件1233。该第一扭簧1231的两端分别固定连接于该输入连接件121和该中间连接件1233;该第二扭簧1232的两端分别固定连接于该输出连接件122和该中间连接件1233。这样,当该输入连接件121被该旋转电机110驱动以转动时,该第一扭簧1231被扭转以发生弹性形变,并通过该中间连接件1233带动该第二扭簧1232扭转以发生弹性形变,进而驱动该输出连接件122转动,从而根据该输入连接件121和该输出连接件122之间的转动角度差来获得该弹性组件123的弹性形变,以便精准地计算出该弹性组件123所产生的力矩。
46.例如,以k1表示该第一扭簧1231的刚度系数;以k2表示该第二扭簧1232的刚度系数;则该弹性组件123的刚度系数k可以通过1/k=1/k1 1/k2获得。如果该输入连接件121的转动角度(即输入角度)为θm,该输出连接件122的转动角度(即输出角度)为θ
out
,则该弹性
组件123所产生的力矩τ=k(θ
m-θ
out
)。可以理解的是,本技术所提及的刚度系数k1和k2可以通过购买产品的参数或实验方式获取;本技术所提及的输入角度θm可以但不限于通过该旋转电机110内置的角度传感器来获得;本技术所提及的输出角度θ
out
则可以但不限于通过该执行机构20内置的角度传感器来获得;本技术所计算出的力矩τ将是该执行机构20与外界接触力大小的参考量,以便进行物理治疗力量的控制。
47.值得注意的是,在本技术的其他示例中,该弹性组件123也可以仅包括该第一扭簧1231,该第一扭簧1231的两端分别固定连接于该输入连接件121和该输出连接件122,以通过该第一扭簧1231直接将该输入连接件121的旋转角度、角速度以及力矩柔性地传递给该输出连接件122,仍能够根据该输入连接件121和该输出连接件122之间的转动角度差来获得该弹性组件123的弹性形变,进而计算出该弹性组件123所产生的力矩。
48.可选地,如图4和图5所示,该输入连接件121、该中间连接件1233以及该输出连接件122依次被可转动地同轴布置;该第一扭簧1231被套设于该输入连接件121和该中间连接件1233之间的轴上;该第二扭簧1232被套设于该中间连接件1233和该输出连接件122之间的轴上,使得该第一扭簧1231和该第二扭簧1232均绕轴发生扭转形变,避免该第一扭簧1231和该第二扭簧1232发生非扭转形变,而影响力矩的计算。
49.可选地,如图4和图5所示,该中间连接件1233具有朝向该输入连接件121的第一扭簧腔12331和朝向该输出连接件122的第二扭簧腔12332,以通过该输入连接件121将该第一扭簧1231封装在该第一扭簧腔12331之内,并通过该输出连接件122将该第二扭簧1232封装在该第二扭簧腔12332之内,以防外部环境对该第一扭簧1231和该第二扭簧1232的形变产生干扰。
50.可选地,如图4和图5所示,该中间连接件1233中的该第一扭簧腔12331和该第二扭簧腔12332均被实施为环形腔,以便将该第一扭簧1231和该第二扭簧1232分别对应地套装于该第一扭簧腔12331和该第二扭簧腔12332之内。
51.可选地,如图4和图5所示,该弹性组件123可以进一步包括第一滑接件1234和第二滑接件1235;该第一滑接件1234被设置于该中间连接件1233和该输入连接件121之间,用于将该中间连接件1233可滑动地连接于该输入连接件121;该第二滑接件1235被设置于该中间连接件1233和该输出连接件122之间,用于将该输出连接件122可滑动地连接于该中间连接件1233,以减少该中间连接件1233分别与该输入连接件121和该输出连接件122之间的滑动摩擦,提高该弹性组件123所产生的力矩计算准度。
52.值得注意的是,本技术的该第一滑接件1234和该第二滑接件1235可以被实施为轴承;也可以被实施为有油或无油衬套;还可以被实施为其他润滑运动的部件。例如,当该第一滑接件1234被实施为轴承时,该第一滑接件1234可以被固定于该中间连接件1233,以绕着该输入连接件121转动;也可以被固定于该输入连接件121,以绕着该中间连接件1233转动。类似地,当该第二滑接件1235被实施为轴承时,该第二滑接件1235可以被固定于该中间连接件1233,以绕着该输出连接件122转动;也可以被固定于该输出连接件122,以绕着该中间连接件1233转动。
53.根据本技术的上述实施例,如图1和图2所示,该柔性驱动机构10可以进一步包括传动器13,该传动器13用于被可传动地设置于该柔性联动器12和该执行机构20之间,以将经由该柔性联动器12输出的运动和力矩转向地传递给该执行机构20。
54.示例性地,如图2和图6所示,该传动器13可以包括输入轴组件131、输出轴组件132以及皮带传动组件133,该输入轴组件131连接于该柔性联动器12的该输出连接件122,该输出轴组件132用于连接该执行机构20,该皮带传动组件133可传动地连接于该输入轴组件131和该输出轴组件132,以便通过较为紧凑的结构来实现运动方向、传递速度以及力矩大小的变换。可以理解的是,在本技术的其他示例中,该传动器13中的该皮带传动组件133也可以被替换成链条传动组件、齿轮传动组件或连杆传动组件等,只要能够实现运动方向、传递速度以及力矩大小的变换即可,本技术对此不再赘述。
55.可选地,如图6和图7所示,该传动器13的该输入轴组件131可以包括输入轴1311、输入轴承座1312、输入轴承挡圈1313以及锁紧螺母1314,该输入轴1311贯穿该输入轴承座1312,并且该输入轴1311通过该输入轴承挡圈1313和该锁紧螺母1314被安装于该输入轴承座1312;该输入轴1311的输入端固定连接于该柔性联动器12的该输出连接件122,且该输入轴1311的输出端连接于该皮带传动组件133。
56.类似地,如图6和图7所示,该传动器13的该输出轴组件132可以包括输出轴1321、第一输出轴承座1322以及输出轴承挡圈1323,该输出轴1321贯穿该第一输出轴承座1322,并且该输出轴1321通过该输出轴承挡圈1323被安装于该第一输出轴承座1322;该输出轴1321的输入端连接于该皮带传动组件133,并且该输出轴1321的输出端用于连接于该执行机构20。
57.可选地,如图6和图7所示,该皮带传动组件133可以包括输入皮带轮1331、输出皮带轮1332以及被套装于该输入皮带轮1331和该输出皮带轮1332的传动皮带1333;该输入皮带轮1331被固定在该输入轴1311的输出端;该输出皮带轮1332被固定在该输出轴1321的输入端。这样,当该柔性联动器12的该输出连接件122带动该输入轴1311转动时,该输入轴1311带动该输入皮带轮1331旋转,以通过该传动皮带1333将该输入皮带轮1331的旋转运动传递给该输出皮带轮1332;进而通过该输出皮带轮1332带动该输出轴1321转动,以传动给该执行机构20而执行所需的治疗动作。
58.值得注意的是,如图2和图3所示,本技术的该柔性驱动机构10的该柔性联动器12可以进一步包括传感器组件124,该传感器组件124被设置用于检测该输出连接件122与该输入连接件121之间的运动差值,以获得该弹性组件123的形变量,便于计算出该柔性联动器12的输出力(矩)。
59.具体地,该传感器组件124可以包括被内置于该传动器13的角度传感器1240,以通过该角度传感器1240获得该柔性联动器12的输出角度和输出角速度,进而计算出该柔性联动器12所产生的力矩。可以理解的是,本技术的该传感器组件124也可以包括被内置于该驱动部件11的角度传感器(图中未示出),用于获得该柔性联动器12的输入角度和输入角速度,以配合输出角度而计算出该柔性联动器12产生的力矩。
60.示例性地,如图6和图7所示,该输出轴组件132可以进一步包括第二输出轴承座1324,该第二输出轴承座1324与该第一输出轴承座1322被间隔布置,该输出轴1321的输出端可转动地设置于该第二输出轴承座1324,以通过该第一输出轴承座1322和该第二输出轴承座1324共同支撑该输出轴1321;该角度传感器1240被固设于该第二输出轴承座1324,并且该角度传感器1240连接于该输出轴1321的输出端,用于测量该输出轴1321的转动角度和角速度,以便通过该输入皮带轮1331和该输出皮带轮1332之间的转换比而得到该柔性联动
器12的该输出连接件122的转动角度,从而计算出该柔性联动器12所产生的力矩。
61.可选地,该角度传感器1240可以但不限于通过支撑件固定在该第二输出轴承座1324;当然也可通过诸如螺接或胶接等方式被固定于该第二输出轴承座1324。可以理解的是,本技术的该角度传感器1240可以但不限于被实施为光电传感器、电磁传感器、编码器或电位器等可以测量角速度和角度变化的传感器。此外,本技术的该柔性联动器12的该传感器组件124可以使用两个或两个以上的角度传感器1240相互配合,也可以只采用一个角度传感器1240,只要能够获得该输入连接件121和该输出连接件122之间的角度差值供计算出输出力即可,本技术对此不做限制。
62.示例性地,附图8示出了根据本技术的上述实施例的柔性联动器12的一个变形示例,便于设置在各个关节处,其中该柔性联动器12可以包括输入连接件121、输出连接件122以及被设置于该输入连接件121和该输出连接件122之间的弹性组件123和角度传感器1240,其中当该输入连接件121被驱动以动作时,该弹性组件123在该输入连接件121的带动下发生弹性形变以带动该输出连接件122,该角度传感器1240用于检测该输入连接件121和该输出连接件122之间的角度差值以获得该弹性组件123的形变量,进而测算出该柔性联动器12的输出力。
63.值得注意的是,在本技术的其他示例中,该角度传感器1240也可以分别被设置于该柔性联动器12的该输入连接件121和/或该输出连接件122,或者分别被设置于与该输入连接件121连接的输入端设备和与该输出连接件122连接的输出端设备,只要能够测量出该输入连接件121和该输出连接件122的角度变化即可,本技术对此不再赘述。
64.此外,本技术的该柔性联动器12除了可以被设置于该驱动部件11和该传动器13之间的连接关节处之外,还可以被设置于其他关节处。如图9所示,该柔性联动器12可以被设置于该执行机构20的内部关节处,仍能够实现柔性力控,以兼顾力量控制和运动控制。可以理解的是,在本技术的其他示例中,该柔性联动器12还可以被设置于该执行机构20与该传动器13的连接关节处,或该执行机构20与动平台的连接关节处等,均能够实现柔性力控,本技术对此不再赘述。
65.以上实施例的各技术特征在不改变本实用新型的基本原理的情况下,可以进行组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
66.以上实施例仅表达了本技术的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对申请专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本技术构思的前提下,还可以做出若干变形和改进,这些都属于本技术的保护范围。因此,本技术的专利保护范围应以所附权利要求为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。