1.本技术涉及导航系统技术领域,尤其涉及一种导航模块和车辆。
背景技术:
2.目前主流的车载组合导航系统采用天线和处理模块分开的设计,例如gnss天线在一个位置,通过馈线与较远处另一个位置的处理模块连接,这样虽然方便了gnss天线和处理模块的各自位置的灵活布置,但整个组合导航系统的集成度低,无法做到小型化。
3.因此,如何提高导航系统集成度,是需要解决的技术问题。
技术实现要素:
4.本技术的目的在于提供一种导航模块和车辆,以解决现有技术中如何提高导航系统集成度的技术问题。
5.为实现上述目的,本技术实施例采取了如下技术方案。
6.第一方面,本技术实施例提供一种导航模块,包括天线模块、惯性测量模块、处理模块、电源管理模块和支撑板。处理模块分别与天线模块和惯性测量模块电连接,电源管理模块分别与惯性测量模块和处理模块电连接,天线模块设置于支撑板的第一面,惯性测量模块、处理模块和电源管理模块设置于支撑板的第二面;处理模块用于与控制器电连接,电源管理模块用于与外部电源电连接。
7.天线模块用于接收来自导航定位系统发射的第一定位信号,惯性测量模块用于测量角速度和加速度并生成惯性测量信号;处理模块用于接收第一定位信号和惯性测量信号,并生成第二定位信号输出至控制器。
8.可选地,导航模块还包括天线屏蔽罩,天线屏蔽罩设置于支撑板的第二面的与天线模块相对的位置。
9.可选地,天线模块和天线屏蔽罩位于支撑板的第一半部分,惯性测量模块、处理模块和电源管理模块位于支撑板的第二半部分,第一半部分与第二半部分相对。
10.可选地,天线模块包括gnss陶瓷天线。
11.可选地,gnss陶瓷天线是有源天线,gnss陶瓷天线与电源管理模块电连接。gnss陶瓷天线是gps天线或bd天线。
12.可选地,惯性测量模块包括3轴加速度传感器和3轴角速度传感器,或惯性测量模块包括imu。
13.可选地,处理模块包括支持实时动态定位rtk定位模式的gnss导航定位soc芯片。
14.可选地,支撑板是印制电路板。
15.第二方面,本技术实施例提供一种车辆,包括控制器和第一方面的导航模块。
16.可选地,支撑板的第一面向上布置。
17.相对于现有技术,本技术具有以下有益效果:
18.本技术实施例提供的导航模块和车辆,可以将天线和处理模块等组件集成在一个
支撑板上,实现了导航系统的小型化,提高了导航系统的集成度,简化了整个导航系统在车辆上的安装和布局,有利于硬件设计和外观设计。
附图说明
19.为了更清楚地说明本技术实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本技术的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
20.图1为本技术实施例的一种导航模块示意图;
21.图2为本技术实施例的一种导航模块的信号传输示意图;
22.图3为本技术实施例的一种导航模块支撑板的布置示意图;
23.图4为本技术实施例的另一种导航模块示意图;
24.图5为本技术实施例的一种imu原理示意图。
25.附图标记说明:
26.100-导航模块,110-天线模块,120-惯性测量模块,130-处理模块,140-电源管理模块,150-支撑板,160-天线屏蔽罩。
具体实施方式
27.为使本技术实施例的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本技术实施例的组件可以以各种不同的配置来布置和设计。
28.因此,以下对在附图中提供的本技术的实施例的详细描述并非旨在限制要求保护的本技术的范围,而是仅仅表示本技术的选定实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。在不冲突的情况下,下述的实施例及实施例中的特征可以相互组合。
29.在本技术的描述中,需要理解的是,术语“上”、“下”、“内”、“外”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该申请产品使用时惯常摆放的方位或位置关系,或者是本领域技术人员惯常理解的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
30.在本技术的描述中,需要说明的是,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体区分开来,而不一定要求或者暗示这些实体之间存在任何这种实际的关系或者顺序。术语“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是直接相连,也可以通过中间媒介间接相连。
31.现有的车载组合导航系统采用天线和处理模块分开的设计,通常天线在一个位置而处理模块等在另一个位置,整个导航系统集成度低,硬件布置和连接较为复杂。
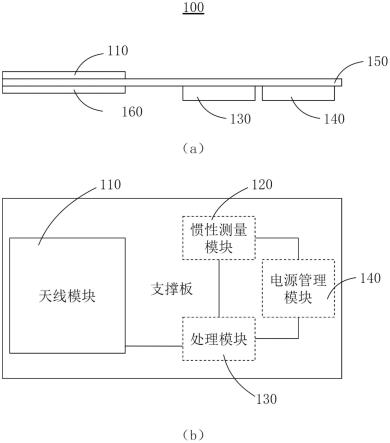
32.为了克服以上问题,可参阅图1,包括侧面方向视图(a)和俯视图(b),本技术的一个实施例提供一种导航模块100,包括天线模块110、惯性测量模块120、处理模块130、电源
管理模块140和支撑板150。图中的各个模块的相对大小和位置关系是示意性的,各个模块实际的尺寸和位置关系可根据实际需要调整。
33.电源管理模块140用于与外部电源电连接,且分别与惯性测量模块120和处理模块130电连接,从而外部电源能通过电源管理模块140为惯性测量模块120和处理模块130提供电源。
34.若外部电源是较高电压的直流电,惯性测量模块120和处理模块130需要较低电压的直流电,电源管理模块140可以通过dc/dc芯片或类似元件转化为惯性测量模块120和处理模块130的电压。为了稳定电源供应,还可以包括整流电路例如二极管,或滤波电路。还可以包括纽扣电池,提供备用电源,在掉电时维持一定功能。
35.若天线模块110包括无源天线,则天线模块110可能不需要与电源管理模块140连接。
36.处理模块130分别与天线模块110和惯性测量模块120电连接,其信号传播关系参考图2,天线模块110用于接收来自导航定位系统发射的第一定位信号,惯性测量模块120用于测量角速度和加速度并生成惯性测量信号,第一定位信号和惯性测量信号均传输至处理模块130处理,处理模块130根据所接收的信号,生成第二定位信号。处理模块130用于与控制器电连接连接,从而将第二定位信号传输至控制器。
37.处理模块130能够根据惯性测量模块120的信息生成一个定位信息,与来自导航定位系统的定位信息相结合,实现组合导航定位的功能。即使来自导航定位系统的信号产生了波动或接收不良,也能根据惯性测量模块120的信息维持良好的定位功能。
38.天线模块110设置于支撑板150的第一面,惯性测量模块120、处理模块130和电源管理模块140设置于支撑板150的第二面,这样分为两面布置能避免天线模块110受到其他模块的对无线信号造成的干扰,使无线信号传输更精确。支撑板150还可以专门地设置为有屏蔽电磁干扰功能的支撑板150。
39.本实施例的导航模块通过将天线和处理模块等组件集成在一个支撑板上,实现了导航系统的小型化,提高了导航系统的集成度并保持良好的组合导航功能和性能,简化了整个导航系统在车辆上的安装和布局,有利于硬件设计和外观设计。
40.为了更好地屏蔽电磁干扰,如图3导航模块100还可包括天线屏蔽罩160,天线屏蔽罩160设置于支撑板150的第二面的与天线模块110相对的位置,这样天线屏蔽罩可以防止惯性测量模块、处理模块和电源管理模块产生的电磁干扰,还能有效地防止支撑板第二面一侧的其他外部器件的电磁干扰。天线屏蔽罩160的尺寸可以比天线模块110小,能起到屏蔽信号的作用即可。
41.可选地,支撑板150可以是印制电路板(printed circuit board,pcb),具有成本低的优势,起到支撑作用的同时可靠地实现了各个模块之间的电连接关系。
42.在支撑板150的平面视图上,天线模块110和天线屏蔽罩160可以被其他模块包围如图3。另一种实施方式中,天线模块110和天线屏蔽罩160位于支撑板150的第一半部分,惯性测量模块120、处理模块130和电源管理模块140位于支撑板150的第二半部分,第一半部分与第二半部分相对。第一半部分和第二半部分大小不是相同的,第一半部分可大于或小于第二半部分,仅仅是描述支撑板150平面视图的大致两个部分。如图4,包括侧面方向视图(a)和俯视图(b),天线模块110和天线屏蔽罩160位于支撑板150的左半部分,其他模块位于
支撑板150的右半部分。这样可以更好地使天线模块110避免受到其他模块干扰。
43.对于天线模块110,具体可包括全球导航卫星系统(global navigation satellite system,gnss)陶瓷天线。gnss陶瓷天线采用陶瓷介质的外壳,其优点包括:体积小,重量轻;坚固耐用,具有抗干扰、和防水防尘的能力,外形整洁美观;工作稳定,具有高增益、高灵敏度。
44.陶瓷天线包括表面银层和陶瓷片,这两部分也是影响影响陶瓷天线的性能的主要因素。
45.表面银层的形状可以影响天线的共振频率,可以调整银面形状来调节共振频率。表面银层小于陶瓷片占用支撑板150的面积,天线屏蔽罩160可以设置于表面银层对应的支撑板150的区域上,大于表面银层占用支撑板150的面积,能起到屏蔽信号的作用。
46.陶瓷片是由陶瓷粉末烧结制作成的,陶瓷粉末的成分和烧结工艺直接影响它的性能。陶瓷片尺寸可以为25
×
25,18
×
18,15
×
15,12
×
12等,陶瓷片的面积越大,共振的频率越高。
47.gnss陶瓷天线分为无源天线和有源天线,无源天线成本低廉、连接方式简单,还有利于节省电源。
48.若采用有源天线,gnss陶瓷天线与电源管理模块140电连接,信号可以在电源作用下起到加强作用。若信号衰减需要进行补偿,可设有两级低噪声放大器(low noise amplifier,lna)进行天线前端信号放大,放大后的信号经电缆输出,电缆同时提供lna所需要的直流电压。
49.gnss陶瓷天线可以是全球定位系统(global positioning system,gps)天线或北斗(bd)天线,适应gps定位系统或北斗卫星导航定位系统。
50.对于惯性测量模块120,可以包括3轴加速度传感器和3轴角速度传感器,来实现空间中x轴、y轴和z轴三个方向的加速度测量和x轴、y轴和z轴三个方向的角速度测量,再根据历史坐标数据,进而运算得到当前坐标。
51.另一种实施方式中,惯性测量模块120可以包括惯性测量单元(inertial measurement unit,imu),由imu集成三个方向的加速度测量和三个方向的角速度测量功能。
52.imu内部用电容的原理测量加速度或角速度,如图5,a、b处为两个电极板,形成一个电容器,而中间有一个设定质量的介质,介质两端与电极板弹性连接,该弹性的弹性系数也是通过计算设定的,这样当整个电容器受到加速度时,由于弹性,该介质的位置会发生变化,导致电容器的电容特性发生变化,可以由此反映到电信号中。
53.随着技术进步,imu的尺寸越来越小,可以做成一个微机电系统(micro-electro-mechanical system,mems)的imu。imu的尺寸可以是2.5
×3×
0.83mm,可见采用imu有利于实现小型化,减少整个导航模块100的占用空间和支撑板150的平面布局。
54.惯性测量模块120可以包括3轴加速度传感器、3轴角速度传感器和其他传感器,例如气压计、罗盘,气压计可以计算海拔。imu还可以是包含6轴以上的imu,例如10dof imu,包含3轴加速度、3轴陀螺仪、3轴罗盘和气压计,更多的传感器能完善方向感知和平衡功能。
55.对于处理模块130,可包括gnss处理芯片,用于解析第一定位信号和惯性测量信号,通过算法输出一个第二定位信号给控制器。控制器可以是汽车的自动驾驶控制器,由本
实施例的导航模块100提供的第二定位信号有利于自动驾驶控制器实现自动驾驶。
56.gnss处理芯片可设置为支持多种卫星导航系统,包括中国的北斗卫星导航系统,美国的gps,俄罗斯的glonass,欧盟的galileo,日本的qzss以及卫星增强系统sbaswaas,egnos,gagan,msas。例如,一种实施方式为至少32个跟踪通道的gnss处理芯片,能同时接收六个卫星导航系统的gnss信号,并且实现联合定位、导航与授时。
57.若gnss处理芯片需要的电源不敏感,例如支持2.7v~3.6v单电源供电,可以通过电源管理模块140的dc/dc供电,还可以外界一个备份电源包括3v纽扣电池或法拉电容,提供实时时钟rtc和备份ram的备份电源,以支持热启动定位。若不接备份电源,系统掉电后,定位信息不能保存,热启动功能可能失效。
58.对于gnss处理芯片,冷启动时间通常比热启动时间长,例如首次定位时间时,冷启动时长为50s,热启动时长为15s。
59.gnss处理芯片的算法可以为实时动态定位(real-time kinematic,rtk)算法,gnss处理芯片为支持实时动态定位rtk定位模式的gnss导航定位soc芯片。
60.gnss处理芯片也可以为支持其他定位模式的芯片,例如rtd、ppp、pdp、spp等定位模式。
61.soc芯片具有小尺寸、低功耗的特点,例如一种车规级gnss处理芯片组成的处理模块130可以设计为尺寸17
×
22
×
2.8mm,重量5克,功耗0.6w,便于贴片封装和集成使用。
62.rtk定位模式可以输出一个厘米级的高精度定位信息。通过rtk定位模式和组合惯导,在gnss天线信号失锁3s时,定位精度可以保持cm级,在gnss天线信号失锁3s时,定位精度可以保持m级。
63.基于上述实施例,本技术实施例还提供一种车辆,包括控制器和第一方面的导航模块100。其中,控制器可包括自动驾驶控制器,以实现自动驾驶或半自动驾驶功能。
64.一种可选的实现方式中,支撑板150的第一面向上布置,这样能较好地避免车辆中其他电子仪器对天线模块造成的电磁干扰,更好地从上方接收无线信号。导航模块100还可以设置在车辆中较高的位置。
65.总体来说,本技术提出了一种导航模块和车辆,可以将天线和处理模块等组件集成在一个支撑板上,实现了导航系统的小型化,提高了导航系统的集成度,简化了整个导航系统在车辆上的安装和布局,有利于硬件设计和外观设计。
66.以上所描述的装置及系统实施例仅仅是示意性的,可以根据实际的需要选择其中的部分或者全部模块来实现本实施例方案的目的。本领域普通技术人员在不付出创造性劳动的情况下,即可以理解并实施。
67.上述仅为本技术较佳的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应该以权利要求的保护范围为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。