1.本实用新型涉及智能巡检技术领域,具体涉及一种智慧巡检机器人系统。
背景技术:
2.现有的巡检方法包括人工巡检和机器巡检,人工巡检经济性较好,同时便于房机械室维护,但人工巡检受作业场景限制,在一些特殊环境下无法进行人工巡检(如房机械室内高温、有无菌要求、存在有害气体等场景),因此设置机器巡检设备实现机器巡检。
3.现有的机器巡检设备大多为监控系统设备,在房机械室内设置多个云台摄像机,检测房机械室内情况,云台摄像机的位置固定,多个云台摄像机将房机械室分为多个区域,在房机械室外通过调节云台摄像机的云台三轴姿态实现不同角度的监控,达到巡检的效果。
4.在房机械室很大的情况下需要的云台摄像机很多,设备成本极高、维护成本极高,后端工作人员工作量激增,导致机器巡检不能满足生产要求。
技术实现要素:
5.本实用新型为解决现有机器巡检设备成本高以及组成系统结构复杂的问题,提出了一种智慧巡检机器人系统,本实用新型设置有吊轨和巡检机器人,巡检机器人带动云台摄像机在吊轨上移动完成房机械室巡检,节省了设备成本,极大的简化了系统结构,并通过位置检测模块实现房机械室区域识别和巡检机器人位置感应,提高了巡检的精细度。
6.为了实现上述目的,本实用新型的技术方案是:
7.一种智慧巡检机器人系统,包括设置于房机械室内的云台摄像机,所述房机械室内设置有多个机柜,所述机柜等距阵列,靠近房机械室的顶部位置设有吊轨,所述吊轨沿机柜位置呈连续的几字形排布,吊轨的横截面呈工字型,吊轨上设置有巡检机器人;
8.所述巡检机器人包括水平行走机构、垂直升降机构、承载机构和控制单元,所述承载机构包括壳体,所述壳体的中部对应吊轨的工字型结构开设有倒置的t字形通槽,所述倒置的t字形通槽两侧对称设置有水平行走机构,所述水平行走机构包括驱动轮,所述驱动轮与吊轨的下部横向段的上端面接触,驱动轮设置有第一电机,壳体与吊轨之间设置有限位机构;
9.所述垂直升降机构一端与壳体固定,另一端与云台摄像机固定;
10.所述吊轨设置有起始位置a和停止位置b,在吊轨的起始位置a和停止位置b处分别安装有第一接近开关和第二接近开关,在吊轨的下端设置多个ic卡,所述ic卡将吊轨分为多个巡检区域,在吊轨的下端还设置有多个铷磁铁,所述铷磁铁将吊轨等分;
11.所述控制单元包括主控模块、通信模块、环境监测模块和位置检测模块,所述第一接近开关和第二接近开关与控制单元电性连接,所述位置检测模块包括rfid读卡器和霍尔传感器,所述rfid读卡器和霍尔传感器与控制单元包电性连接,所述控制单元与第一电机电性连接,控制单元根据位置检测模块控制第一电机的转速。
12.设置吊轨和巡检机器人,巡检机器人包括水平行走机构、垂直升降机构、承载机构和控制单元,吊轨沿机柜位置设置,吊轨布设于整个房机械室上方,水平行走机构沿吊轨移动,带动云台摄像机实现巡检,云台摄像机用于拍摄房机械室内的视频图像,通过垂直升降机构可以调节云台摄像机距地面的距离,满足不同的巡检需要;
13.另外通过在吊轨的下端设置多个ic卡,将吊轨分为多个巡检区域,当巡检机器人移动到ic卡位置,rfid读卡器读取ic卡信息,进而确定巡检机器人进入该区域,设置多个铷磁铁,铷磁铁将吊轨等分,巡检机器人通过铷磁铁时霍尔传感器将输出电平信号,进而主控模块可以记录接收电平信号的次数,便于后期对巡检机器人速度以及位置的确定提供基础,为后期构建基于物联网的智慧控制系统提供硬件基础。
14.进一步地,所述壳体包括左部和右部,所述左部和右部组合后为内部中空的方形结构,左部和右部通过螺栓固定,所述左部和右部之间横向设置有隔板,所述隔板将壳体分为上部和下部,隔板设置于靠近倒置的t字形通槽下部位置;
15.两个所述水平行走机构之间设置传动机构,所述传动机构包括第一连接杆、第一驱动齿轮和两个第二驱动齿轮,两个所述第二驱动齿轮分设于第一连接杆两端,所述第一驱动齿轮设置于第一连接杆上且与第一电机的输出轴位于同一直线,第一驱动齿轮与第一电机的输出轴通过皮带转动连接,两个第二驱动齿轮与第一驱动齿轮均与第一连接杆固定;
16.所述驱动轮连接有第二连接杆,所述第二连接杆另一端固定设置第三驱动齿轮,第三驱动齿轮与第二驱动齿轮通过皮带传动连接。
17.设置隔板将壳体分别为上下两部分,隔板将水平行走机构和垂直升降机构分隔开,使水平行走机构和垂直升降机构相互独立,便于维修。
18.进一步地,所述第一连接杆和第二连接杆之间设置有支架,
19.所述支架设置于隔板上部,支架包括两个上支板和两个下支板,所述上支板为凸字形结构,上支板的中部开设圆形通孔,所述圆形通孔内设置第二连接杆,所述第二连接杆通过轴承与上支板固定,所述驱动轮通过上支板与吊轨下部横向段的上端面接触,驱动轮通过上支板限位,
20.上支板与下支板固定,所述下支板为u形板,下支板的圆弧段中部开设圆形孔,所述圆形孔内设置第一连接杆,第一连接杆通过轴承与下支板固定,两个所述第二驱动齿轮均设置于下支板外侧;
21.所述支架分别与壳体的左部和右部固定。
22.为了提高巡检机器人水平行走过程的稳定性,设置第一连接杆和第二连接杆通过传动方式将两个驱动轮联系起来,两个驱动轮相当于同轴驱动,该结构使两个驱动轮的转速一致,从而保证了巡检机器人水平行走的平稳性。
23.进一步地,所述限位机构对称分设于隔板的前后两侧,限位机构包括两个对向设置的限位板,所述限位板为十字形板,限位板的竖直方向上设置两个第一滚轮轴承,两个所述第一滚轮轴承夹紧吊轨的下部横向段;
24.限位板的水平方向边缘位置设置两个第二滚轮轴承,对向的两个所述第二滚轮轴承夹紧吊轨的下部横向段的两侧边,第二滚轮轴承的圆周与吊轨的下部横向段的两侧边接触。
25.为了使巡检机器人“咬紧”吊轨,设置限位机构,两组限位机构分别从前后两端对吊轨进行定位,在水平方向上吊轨的下端“一字形”段被设置在两个第一滚轮轴承的间隙中,在竖直方向上吊轨的下端“一字形”段的两侧边被两个第二滚轮轴承夹住,在移动时,两个第一滚轮轴持续转动,第二滚轮轴承持续转动在实现限位的同时不会形成运动干涉,在这种结构下吊轨与驱动轮的位置相对固定,进一步提高巡检机器人水平行走的平稳性。
26.进一步地,所述巡检机器人还包括转弯机构,所述转弯机构包括转盘和固定柱,所述转盘中部呈环形,转盘两侧设置有对称的长条板,所述长条板上设置限位板,限位板与长条板为一体化结构,所述固定柱为工字形圆柱体,转盘套设在固定柱上,转盘与固定柱转动连接,固定柱与隔板固定。
27.由于吊轨有转弯等弧形轨道,为了提高巡检机器人过弯的柔顺度,避免巡检机器人碰撞磨损设置转弯机构,由于吊轨的截面始终呈工字型,因此限位机构始终可以使巡检机器人“咬紧”吊轨,吊轨为刚性材质,在驱动轮推动下转盘随吊轨结构走向被动转动,实现柔顺过弯,在过弯后受吊轨的形状影响,转盘被动复位,巡检机器人继续沿直线移动。
28.进一步地,所述垂直升降机构包括套筒、减速电机、柔锁机构、连接板和工字轮,所述套筒包括外筒和内筒,所述外筒与连接板固定,所述连接板为方形框架结构,连接板与壳体的左部和右部通过螺栓固定,减速电机与连接板固定,减速电机的输出轴连接工字轮,所述工字轮与连接板转动连接,工字轮上缠绕有柔锁机构,所述柔锁机构另一端与内筒固定,所述内筒的另一侧与云台摄像机固定,所述减速电机电性连接主控模块。
29.通过垂直升降机构实现云台摄像机距地面的距离调节,提高巡检机器人使用灵活性。
30.所述主控模块包括mcu芯片,所述mcu芯片的adc引脚连接环境监测模块,所述环境监测模块包括温度传感器、光照传感器、噪声传感器和烟雾传感器;
31.所述通信模块包括rs485串口模块、rs232串口模块和wifi模块,mcu芯片通过通信模块通信连接有上位机。
32.所述霍尔传感器的输出端与mcu芯片的io引脚连接,所述rfid读卡器与mcu芯片通过uart串口通信连接。
33.通过mcu芯片控制电机实现巡检机器人沿吊轨循环往返运动,提高了巡检设备的自动化程度为后期构建基于物联网的智慧控制系统提供硬件基础。
34.通过上述技术方案,本实用新型的有益效果为:
35.1.本实用新型设置吊轨和巡检机器人实现巡检机器人沿吊轨做往返运动,将云台摄像机与巡检机器人固定,云台摄像机沿吊轨拍取房机械室视频图像,替代人工巡检,操作灵活,对比现有机器巡检制成本低,系统结构简单。
36.2.本实用新型通过在吊轨的下端设置多个ic卡,将吊轨分为多个巡检区域,当巡检机器人移动到ic卡位置,rfid读卡器读取ic卡信息,进而确定巡检机器人进入该区域,设置多个铷磁铁,铷磁铁将吊轨等分,巡检机器人通过铷磁铁时霍尔传感器将输出电平信号,进而主控模块可以记录接收电平信号的次数,确定巡检机器人所在位置。
附图说明
37.图1是本实用新型一种智慧巡检机器人系统的结构示意图之一;
38.图2是图1的侧视图;
39.图3是本实用新型一种智慧巡检机器人系统的巡检机器人结构示意图之一;
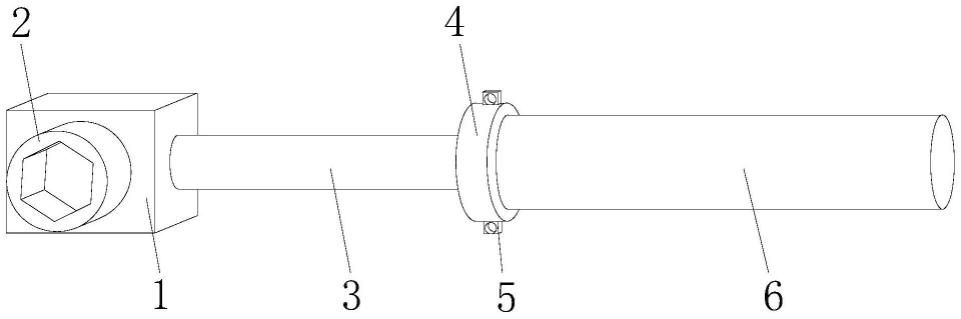
40.图4是图3的a处放大图;
41.图5是图3的俯视图;
42.图6是本实用新型一种智慧巡检机器人系统的垂直升降机构结构示意图;
43.图7是本实用新型一种智慧巡检机器人系统的水平行走机构结构示意图;
44.图8是本实用新型一种智慧巡检机器人系统的电气原理图;
45.图9是本实用新型一种智慧巡检机器人系统的吊轨布设示意图。
46.附图中标号为:
47.1为云台摄像机,2为吊轨,3为壳体,4为驱动轮,5为第一电机,6为第一接近开关,7为第二接近开关,8为rfid读卡器,9为霍尔传感器,10为隔板,11为第一连接杆,12为第一驱动齿轮,13为第二驱动齿轮,14为第二连接杆,15为第三驱动齿轮,16为上支板,17为下支板,18为限位板,19为第一滚轮轴承,20为第二滚轮轴承,21为转盘,22为固定柱,23为减速电机,24为连接板,25为工字轮,26为外筒,27为内筒,28为mcu芯片,29为环境监测模块,30为通信模块,31为红外摄像机。
具体实施方式
48.下面结合附图和具体实施方式对本实用新型作进一步说明:
49.实施例一
50.如图1~图9所示,一种智慧巡检机器人系统,包括设置于房机械室内的云台摄像机1,所述房机械室内设置有多个机柜,所述机柜等距阵列,靠近房机械室的顶部位置设有吊轨2,所述吊轨2沿机柜位置呈连续的几字形排布,吊轨2的横截面呈工字型,吊轨2上设置有巡检机器人;
51.所述巡检机器人包括水平行走机构、垂直升降机构、承载机构和控制单元,所述承载机构包括壳体3,所述壳体的中部对应吊轨2的工字型结构开设有倒置的t字形通槽,所述倒置的t字形通槽两侧对称设置有水平行走机构,所述水平行走机构包括驱动轮4,所述驱动轮4与吊轨2的下部横向段的上端面接触,驱动轮4设置有第一电机5,壳体3与吊轨2之间设置有限位机构;
52.所述垂直升降机构一端与壳体3固定,另一端与云台摄像机1固定;
53.所述吊轨2设置有起始位置a和停止位置b,在吊轨2的起始位置a和停止位置b处分别安装有第一接近开关6和第二接近开关7,在吊轨2的下端设置多个ic卡,所述ic卡将吊轨2分为多个巡检区域,在吊轨2的下端还设置有多个铷磁铁,所述铷磁铁将吊轨2等分;
54.所述控制单元包括主控模块、通信模块30、环境监测模块29和位置检测模块,所述第一接近开关6和第二接近开关7与控制单元电性连接,所述位置检测模块包括rfid读卡器8和霍尔传感器9,所述rfid读卡器8和霍尔传感器9与控制单元包电性连接,所述控制单元与第一电机5电性连接,控制单元根据位置检测模块控制第一电机5的转速。
55.如图2和3所示,所述壳体3包括左部和右部,所述左部和右部组合后为内部中空的方形结构,左部和右部通过螺栓固定,所述左部和右部之间横向设置有隔板10,所述隔板10将壳体3分为上部和下部,隔板10设置于靠近倒置的t字形通槽下部位置;
56.两个所述水平行走机构之间设置传动机构,所述传动机构包括第一连接杆11、第一驱动齿轮12和两个第二驱动齿轮13,两个所述第二驱动齿轮13分设于第一连接杆11两端,所述第一驱动齿轮12设置于第一连接杆11上且与第一电机5的输出轴位于同一直线,第一驱动齿轮12与第一电机5的输出轴通过皮带转动连接,两个第二驱动齿轮13与第一驱动齿轮12均与第一连接杆11固定;
57.所述驱动轮4连接有第二连接杆14,所述第二连接杆14另一端固定设置第三驱动齿轮15,第三驱动齿轮15与第二驱动齿轮13通过皮带传动连接。
58.如图2~4所示,所述第一连接杆11和第二连接杆14之间设置有支架,
59.所述支架设置于隔板10上部,支架包括两个上支板16和两个下支板17,所述上支板16为凸字形结构,上支板16的中部开设圆形通孔,所述圆形通孔内设置第二连接杆14,所述第二连接杆14通过轴承与上支板16固定,所述驱动轮4通过上支板16与吊轨2下部横向段的上端面接触,驱动轮4通过上支板16限位,
60.上支板16与下支板17固定,所述下支板17为u形板,下支板17的圆弧段中部开设圆形孔,所述圆形孔内设置第一连接杆11,第一连接杆11通过轴承与下支板17固定,两个所述第二驱动齿轮13均设置于下支板17外侧;
61.所述支架分别与壳体3的左部和右部固定。
62.如图2~4所示,所述限位机构对称分设于隔板10的前后两侧,限位机构包括两个对向设置的限位板18,所述限位板18为十字形板,限位板18的竖直方向上设置两个第一滚轮轴承19,两个所述第一滚轮轴承19夹紧吊轨2的下部横向段;
63.限位板18的水平方向边缘位置设置两个第二滚轮轴承20,对向的两个所述第二滚轮轴承20夹紧吊轨2的下部横向段的两侧边,第二滚轮轴承20的圆周与吊轨2的下部横向段的两侧边接触。
64.如图2~5所示,所述巡检机器人还包括转弯机构,所述转弯机构包括转盘21和固定柱22,所述转盘21中部呈环形,转盘21两侧设置有对称的长条板,所述长条板上设置限位板18,限位板18与长条板为一体化结构,所述固定柱22为工字形圆柱体,转盘21套设在固定柱22上,转盘21与固定柱22转动连接,固定柱22与隔板10固定。
65.如图6所示,所述垂直升降机构包括套筒、减速电机23、柔锁机构、连接板24和工字轮25,所述套筒包括外筒26和内筒27,所述外筒26与连接板24固定,所述连接板24为方形框架结构,连接板24与壳体的左部和右部通过螺栓固定,减速电机23与连接板24固定,减速电机23的输出轴连接工字轮25,所述工字轮25与连接板24转动连接,工字轮25上缠绕有柔锁机构,所述柔锁机构另一端与内筒27固定,所述内筒27的另一侧与云台摄像机1固定,所述减速电机23电性连接主控模块。
66.在垂直降时,减速电机23正转,工字轮25放绳,柔锁机构连接的内筒27受云台摄像机1的重力作用伸长,减速电机23停机后有锁轴保护,工字轮25锁紧,工字轮25承担云台摄像机1的重力达到受力平衡,外筒26对内筒27进行限位,使云台摄像机1不会出现晃动。
67.在垂直升时,减速电机23反转,工字轮25收线,云台摄像机1上升复位。
68.实施例2
69.如图8所示,为便于控制,所述主控模块包括mcu芯片28,所述mcu芯片28的adc引脚连接环境监测模块29,所述环境监测模块29包括温度传感器、光照传感器、噪声传感器和烟
雾传感器;
70.所述通信模块30包括rs485串口模块、rs232串口模块和wifi模块,mcu芯片28通过通信模块30通信连接有上位机。
71.进一步地,所述霍尔传感器9的输出端与mcu芯片28的io引脚连接,所述rfid读卡器8与mcu芯片28通过uart串口通信连接。
72.在本实施例中,ic卡采用符合iso14443的mifare one s50、s70 的抗金属智能卡,ic卡直径为30mm,读卡距离不低于20mm;根据巡检区域粘贴在进、出区域口、弯道出入口、上下坡度位置,卡内数据内容为可被识别的唯一代号。铷磁铁的直径为20mm,厚度为3mm。
73.mcu芯片28采用stm32f407ve型单片机,rfid读卡器8为13.56mhz高频rfid读写芯片fm1701,符合iso14443 协议,可读可写,读取距离一般为10~80mm。霍尔传感器9采用uhe4913g-ae3-r芯片,该芯片属于微功耗霍尔开关,常用于升级干簧管。芯片可检测磁铁距离为0~20mm,没有磁铁输出高电平,有磁铁在检测范围输出低电平。
74.第一电机5和减速电机23均采用m3508直流无刷电机,m3508直流无刷电机设置电机调速器robomaster c620,具备can总线控制方式和pwm控制方式,支持从can总线获取电机温度、转子位置和转子转速等信息。
75.温度传感器采用shtc3温湿度传感器,通过i2c总线通信,测温范围为-40~125℃,精度0.2℃;测湿度范围为0-100%rh,精度2%。
76.光照传感器采用bh1750fvi芯片,通过i2c总线通信,测光照范围为1~65535lx,精度0.5lx。
77.烟雾传感器采用mq-2传感器,实现对丙烷、天然气和其它可燃蒸气的检测,采用ad输出,监测浓度300~10000ppm。
78.噪声传感器采用全指向驻极体咪头进行声音采集,通过2级运放放大100倍,信号输出ad值发送到muc芯片28。
79.作业时,mcu芯片28上电控制电机调速器,电机调速器驱动第一电机5正向转动,结合实施例1的机械结构,第一电机5转动带动驱动轮4转动,受上支板16限位和摩擦力的作用驱动轮4转动使巡检机器人沿吊轨2移动,当巡检机器人触碰到第二接近开关7时,表示巡检机器人已经处于吊轨2的停止位置b,第二接近开关7输出电平信号,mcu芯片28接收到第二接近开关7的输入信号,mcu芯片28通过电机调速器使第一电机5反转,巡检机器人朝吊轨2起始位置a前进,当巡检机器人触碰到第一接近开关6时,第一接近开关6输出电平信号,mcu芯片28接收到第一接近开关6的输入信号,mcu芯片28控制电机调速器,电机调速器驱动第一电机5正向转动,进入下一循环。
80.在巡检机器人移动期间经过ic卡位置rfid读卡器8会对ic卡信息进行读取,mcu芯片28接收到写入信息后通过wifi模块将读取的ic卡信息发送至上位机,供工作人员查阅,同时mcu芯片28记录霍尔传感器9发送低电平的次数,由于多个铷磁铁的间距一定,因此可以计算出巡检机器人所在位置。
81.通过上位机可以调节云台摄像机1的云台三轴姿态。通过上位机对mcu芯片28发出控制指令使mcu芯片28通过电机调速器控制减速电机23正转、反转如实施例1中描述垂直升降机构带动云台摄像机1做升、降调节。
82.实施例3
83.为了提高人机交互效果还设置有氛围灯和语音输出模块,所述语音输出为tts语音输出,tts语音芯片为syn6288e,通过uart连接mcu芯片28,通过功放芯片lm4871进行音频放大,输出到8欧/2w喇叭。可以输出语音和内置音效。
84.在巡检机器人上设置两个超声波测距模块用于障碍物监测,超声波测距模块采用dyp-a02yy4w-v2.0型超声波传感器,超声波测距模块测量精度为1cm,检测角度60
°
,具有温度补偿。超声波测距模块通过rs485串口模块与mcu芯片28通信连接,波特率9600bps。
85.在云台摄像机1侧部设置有一个红外摄像机31,所述红外摄像机31具有热成像功能,红外摄像机31用于检测人员入侵或者鼠类活动,红外摄像机31随云台摄像机1的云台进行三轴调节,红外摄像机31通过rs485串口模块与mcu芯片28通信连接。
86.以上所述之实施例,只是本实用新型的较佳实施例而已,并非限制本实用新型的实施范围,故凡依本实用新型专利范围所述的构造、特征及原理所做的等效变化或修饰,均应包括于本实用新型申请专利范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。