1.本发明涉及数据处理领域,具体为一种数控机床轴承检测方法。
背景技术:
2.数控机床是一种装有程序控制系统的自动化机床,其能较好地解决复杂、精密、小批量、多品种的零件加工问题,是一种柔性的、高效能的自动化机床。在数控机床的不同位置可能设置有多个轴承,用于维持数控机床的正常运行。
3.随着社会的进步和科学技术的发展,以及机械化程度的提高,轴承的应用越来越广泛。轴承是机械设备中的一种重要零部件,它的主要功能是支撑机械转体,降低其运动过程中的摩擦系数,并保证其回转精度。轴承是机械设备的重要组成部分,轴承的质量关系着设备能否正常运转。但是现有的生产技术还存在许多不足之处,由于工厂普遍自动化程度不高,设备老化,配套设备不齐全,工艺不成熟,人为因素等多方面的原因会导致轴承出现不同程度的损伤。因此轴承表面缺陷的精准检测至关重要。
4.现有的轴承质量检测主要为人工检测和基于机器视觉的检测,其中人工检测工作量大,且效率低下、漏检率高,而基于机器视觉的检测,由于轴承表面缺陷往往十分微小,传统的缺陷识别算法易造成误检,而轴承属于高精密器件,误检会极大的影响轴承的出厂质量。
技术实现要素:
5.为了解决上述技术问题,本发明的目的在于提供一种数控机床轴承检测方法,所采用的技术方案具体如下:本发明提供的一种数控机床轴承检测方法,包括以下步骤:在轴承表面子灰度图像的灰度直方图上统计小于最佳分割阈值的灰度级,记为第一集合;将所述表面子灰度图像上灰度值小于最佳分割阈值的像素点记为疑似缺陷像素点;将灰度值等于第一集合内任一元素的一个像素点,记为一个待检测像素点;以待检测像素点为中心设置一个第一预设尺寸的窗口;将窗口内所有疑似缺陷像素点的灰度值的方差记为第一方差,将窗口内非中心的疑似缺陷像素点记为对照像素点,根据窗口中心像素点的灰度值与所有对照像素点的灰度值得到第一特征,根据第一特征和第一方差得到待检测像素点为边缘像素点的概率;根据窗口内的疑似缺陷像素点的数量以及低灰度值像素点数量获得边缘像素点为缺陷外边缘的概率,根据待检测像素点为边缘像素点的概率以及边缘像素点为缺陷外边缘的概率获得待检测像素点为缺陷连通域的外边缘像素点的概率,记为待检测像素点的第一概率;获取具有相同灰度级的所有待检测像素点,根据所述所有待检测像素点的第一概率得到每个灰度级为真正的最佳分割阈值的概率,记为第二概率,利用第二概率得到每个灰度等级的类间方差,将类间方差最大的灰度等级作为真正的最佳分割阈值,利用真正的
最佳分割阈值获得缺陷区域。
6.进一步地,所述待检测像素点为边缘像素点的概率是指第一特征与第一方差的乘积。
7.进一步地,所述根据待检测像素点为边缘像素点的概率以及边缘像素点为缺陷外边缘的概率获得待检测像素点为缺陷连通域的外边缘像素点的概率的计算公式为:其中p表示待检测像素点为缺陷连通域的外边缘像素点的概率,表示待检测像素点为边缘像素点的概率,表示边缘像素点为缺陷外边缘的概率。
8.进一步地,所述根据所述所有待检测像素点的第一概率得到每个灰度级为真正的最佳分割阈值的概率的计算公式为::其中n表示灰度直方图上小于最佳分割阈值的灰度级数量,表示其中第i个灰度级对应的像素点数量,表示该第1个灰度级对应的像素点数量,表示灰度级中第h个像素点为缺陷连通域的外边缘像素点的概率。
9.进一步地,所述低灰度值像素点:将窗口内的所有疑似缺陷像素点的灰度值按从小到大排序,获得像素灰度值序列,其中m表示该窗口内的疑似缺陷像素点的数量;然后计算该序列中相邻两像素点的灰度差值,获得差值序列{},取该差值序列的最大值,根据将分为d个低灰度值像素点和m-d个高灰度值像素点。
10.进一步地,所述利用真正的最佳分割阈值获得缺陷区域的方法为:将灰度值小于真正的最佳分割阈值的像素点为目标像素点,根据目标像素点获得缺陷区域。
11.本发明的有益效果:本发明通过otsu算法先对轴承表面灰度图像进行初步分割,能够降低后续精准识别的计算量,然后根据初步分割的缺陷区域内的各像素点的邻域像素灰度统计特征,计算像素点为缺陷边缘点的概率,然后根据初步分割的缺陷区域内各灰度级内像素点的数量和为缺陷边缘点的概率,对各灰度级赋予权值,进而利用加权后的otsu算法对初步分割的缺陷区域进行再分割,获取目标区域,最后判断目标区域是否为缺陷区域,能够防止微小缺陷的误识别,提高了检测精度。
附图说明
12.为了更清楚地说明本发明实施例或现有技术中的技术方案和优点,下面将对实施例或现有技术描述中所需要使用的附图作简单的介绍,显而易见地,下面描述中的附图仅
仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它附图。
13.图1是本发明的一种数控机床轴承检测方法的流程图。
具体实施方式
14.为了更进一步阐述本发明为达成预定发明目的所采取的技术手段及功效,以下结合附图及较佳实施例,对依据本发明的方案,其具体实施方式、结构、特征及其功效,详细说明如下。在下述说明中,不同的“一个实施例”或“另一个实施例”指的不一定是同一实施例。此外,一或多个实施例中的特定特征、结构或特点可由任何合适形式组合。
15.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。
16.本发明所针对的情景为:轴承表面的缺陷往往十分微小,现有的检测算法易造成误检测。
17.本发明利用计算机视觉技术处理采集的轴承表面灰度图像,然后利用otsu算法先对轴承表面灰度图像进行初步分割,根据初步分割的缺陷区域内的各像素点的邻域像素灰度统计特征,计算像素点为缺陷边缘点的概率,再根据初步分割的缺陷区域内各灰度级内像素点的数量和为缺陷边缘点的概率,对各灰度级赋予权值,进而利用加权后的otsu算法对初步分割的缺陷区域进行再分割,获取精准目标区域,最后判断目标区域是否为缺陷区域。
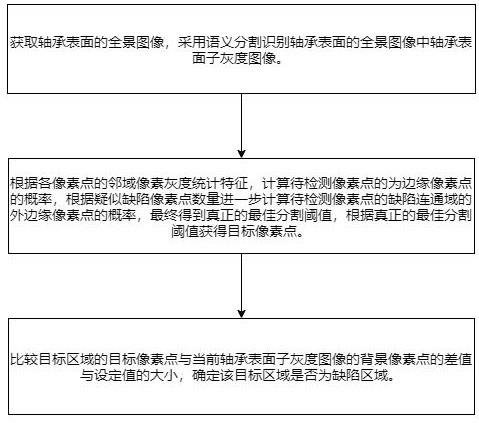
18.具体地,本发明提出的一种数控机床轴承检测方法的实施例,请参阅图1所示,包括以下步骤:步骤1,获取轴承表面的全景图像,采用语义分割识别取轴承表面的全景图像中的轴承表面子灰度图像。
19.本实施例中使用滚筒运输机旋转轴承,利用两个led环形光源进行两侧照明,使采集的轴承表面灰度图像光照均匀,相机正上方俯视拍摄,轴承每旋转120度,拍摄一张图像,每个轴承拍摄三张图像。
20.对于采集的轴承表面的全景图像进行灰度化处理得到的灰度图记为表面灰度图像,本发明中所使用的灰度化方法为加权灰度化,加权灰度化为公知技术,此处不再赘述。
21.由于需要根据轴承表面的像素点邻域内的像素灰度统计特征,获取各灰度级的权值,提高otsu算法的分割精度,所有需要先识别出图像中轴承表面的特征信息。
22.本发明采用dnn语义分割的方式来识别分割图像中的目标。
23.该dnn网络的相关内容如下:a.使用的数据集为俯视采集的滚筒运输机上的轴承图像数据集。
24.b.需要分割的像素,共分为2类,即训练集对应标签标注过程为:单通道的语义标签,对应位置像素属于背景类的标注为0,属于轴承表面的标注为1。
25.c.网络的任务是分类,所以使用的loss函数为交叉熵损失函数。
26.至此,通过dnn实现了滚筒运输机上轴承图像的处理,获得图像中轴承表面的连通域信息,由此获得单个轴承表面全景图像的三幅轴承表面子灰度图像。
27.步骤2,根据各像素点的邻域像素灰度统计特征,计算待检测像素点的为边缘像素
点的概率,根据疑似缺陷像素点数量进一步计算待检测像素点为缺陷连通域的外边缘像素点的概率,最终得到真正的最佳分割阈值,根据真正的最佳分割阈值获得目标像素点。
28.本实施例中,首先利用传统的otsu算法对轴承表面灰度图像进行初步分割,具体地,获取轴承表面子灰度图像的灰度直方图,以一张轴承表面子灰度图像为例,利用otsu算法求取轴承表面灰度图像的灰度直方图上的最佳分割阈值t,令像素灰度值小于t的像素点为疑似缺陷像素点。
29.其次,根据对初步分割区域内各灰度级设置相应权值,进行使用加权后的otsu算法对初步分割的缺陷区域进行再分割,获取精准的缺陷区域;具体地,在轴承表面子灰度图像的灰度直方图上统计小于t的灰度级,获得第一集合,其中n表示灰度直方图上小于t的灰度级数量;取一个灰度值为的像素点,这个像素点记为待检测像素点,设置一个第一预设尺寸为的窗口,令其为中心像素点,只分析窗口内的疑似缺陷像素点;然后计算窗口内疑似缺陷像素点的灰度的方差v,记为第一方差,第一方差表示各像素点灰度值的均匀性,当窗口内的像素点全部为疑似缺陷像素点或者正常像素点时,第一方差较小;当窗口内含有边缘像素点,且边缘像素点逐渐向窗口中心靠近时,窗口内的第一方差逐渐增大。
30.然而第一方差易受不同类型缺陷的像素灰度值的大小存在差异的影响,故当不同窗口内正常像素点和疑似缺陷像素点的数量相同时,两种像素点的灰度差异越大,窗口内的第一方差越大,影响对窗口中心像素点的分析。
31.因此再计算窗口内中心像素点与其它像素点的灰度差异的比例均值b为:其中表示窗口中心像素点的灰度值,表示窗口内第j个非中心的疑似缺陷像素点的灰度值,m表示窗口内疑似缺陷像素点的数量。故当与的灰度差异较大时,说明窗口内存在正常像素点和疑似缺陷像素点,而公式表示两像素点的相对灰度差异,其两像素点的灰度差异对分子和分母同步影响,因此受不同类型缺陷的影响较小,b表示窗口内与中心像素点不同的非中心像素点的数量的多少,b值越大,与中心像素点不同的非中心像素点越多。
32.轴承表面一个缺陷为一完整连通域,当窗口中心像素点越靠近连通域边缘,窗口内与中心像素点不同的非中心像素点数量越多。因此以b值为窗口灰度方差v的校正权值,令表示窗口中心像素点为边缘像素点的概率,也即待检测像素点为边缘像素点的概率,其中v为对窗口内整体像素点的灰度差异分析,受同种像素点的灰度变化较小,但受不同种像素点之间的灰度差异变化较大。而b为对中心像素点和非中心像素点的灰度差异分析,受同种像素点的灰度变化较大,但受不同种像素点之间的灰度差异变化较小。
33.因此根据窗口内的像素点的灰度值,将其从小到大排序,获得像素灰度值序列
,其中m表示该窗口内的疑似缺陷像素点的数量。然后从左至右依次计算该序列中相邻两像素点的灰度差值,即为,且此时y大于1,由此获得差值序列{},取该序列的最大值。对于计算得到时对应的两个像素点,这两个像素点中处于后一个像素点的灰度值作为划分阈值,将中小于划分阈值的像素点作为低灰度值像素点,将中大于等于分割阈值的像素点作为高灰度值像素点,由此将像素灰度值序列分为d个低灰度值像素点和m-d个高灰度值像素点。
34.故窗口内中心像素点为缺陷连通域的外边缘像素点的概率p为:其中表示窗口中心像素点为边缘像素点的概率,表示边缘像素点为缺陷外边缘的概率,m表示窗口内疑似缺陷像素点的数量,m-d表示窗口内疑似缺陷像素点可能为正常像素点的数量。当中心像素点为边缘点时,窗口内正常像素点的数量越多,边缘像素点为缺陷外边缘的概率越大。
35.同理获得所有灰度值为的像素点为缺陷连通域的外边缘像素点的概率p,获得集合,其中表示灰度值为的像素点数量。
36.需要说明的是,使用传统的otsu算法分割目标区域时,当目标区域的面积远小于背景区域的面积时,otsu算法求取的最佳分割阈值会偏向于背景区域,而轴承表面缺陷微小,故初步分割后获取的缺陷像素点会含有部分正常像素点,因此其为疑似缺陷像素点,需要进行再分割,而真正的最佳分割阈值对应的灰度级像素点应为图像中缺陷连通域的外边缘像素点,即缺陷连通域边缘相邻的正常像素点,而正常像素点的灰度值大于缺陷像素点的灰度值。
37.进一步地,由于otsu算法求取的最佳分割阈值应处于灰度直方图上缺陷波峰和背景波峰之间的波谷处,故最佳分割阈值在灰度直方图上对应灰度级的像素点数量应该较少。
38.因此灰度级为真正的最佳分割阈值的概率w为:其中n表示灰度直方图上小于t的灰度级数量,表示该部分灰度级中第i个灰度级对应的像素点数量,表示该部分灰度级的中像素点数量,表示该部分灰度级中第1个灰度级对应的像素点数量,值越大,真正的最佳分割阈值的概率越小,公式
越大。而表示灰度级中第h个像素点为缺陷连通域的外边缘像素点的概率,公式的值越大,真正的最佳分割阈值的概率越大。
39.同理获取小于t的灰度级集合中各灰度级为真正的最佳分割阈值的概率w,获得概率集合,其中n表示灰度直方图上小于t的灰度级数量。对概率集合进行归一化操作,获得各灰度级的权值集合。
40.然后对otsu算法进行加权,获取真正的最佳分割阈值。计算公式如下:其中为遍历阈值,i={1,2,
…
,n},其逐灰度级遍历,表示分割阈值为时加权后的类间方差,将灰度值小于分割阈值的像素点记为缺陷类像素点,将灰度值不小于分割阈值的像素点记为背景类像素点;和缺陷类像素点数量和背景类像素点数量在该部分直方图上像素数量总数m的占比,和表示分缺陷类和背景类像素点的灰度均值。为其对应权重,分割阈值越接近真正的最佳分割阈值时,权值越大。
41.由此获得n个类间方差,取这组数据的最大值对应的真正的最佳分割阈值,令灰度值小于的像素点为目标像素点。
42.由于不管轴承子图像中是否有缺陷,otsu算法必会对子图像进行分割,因此需要进一步分析分割的目标像素点是否为缺陷像素点。
43.步骤3,比较目标区域的目标像素点与当前轴承表面子灰度图像的背景像素点的差值与设定值的大小,确定该目标区域是否为缺陷区域。
44.本实施例中,获取一张有缺陷的轴承表面子灰度图像,记为第一图像,获取一张无缺陷的轴承表面子灰度图像,记为第二图像,利用加权后的otsu算法分别对第一图像和第二图像计算得到第一背景类像素点和第二背景类像素点,分别利用第一、第二背景类像素点的灰度均值减去目标像素点的灰度均值的差值,分别为和,确定设定值为。故若当前轴承表面子灰度图像中分割的背景像素点的灰度均值减去目标像素点的灰度均值的差值e大于时,分割的目标区域为缺陷区域,否则该轴承子图像中无缺陷,上述的目标像素点即为缺陷类像素点。
45.由此对其它轴承表面子灰度图像进行缺陷检测,判断该轴承表面是否含有缺陷,进而分拣出含有缺陷的轴承。
46.以上所述实施例仅用以说明本技术的技术方案,而非对其限制;尽管参照前述实施例对本技术进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各
实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本技术各实施例技术方案的精神和范围,均应包含在本技术的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。