技术特征:
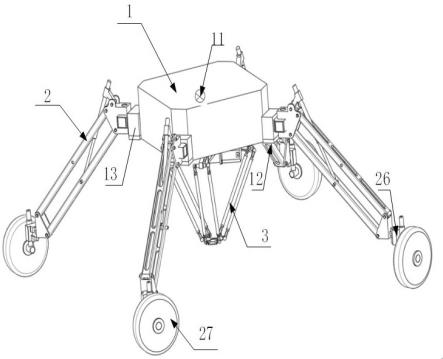
1.一种喷洒用全地形农业机器人,包括安装有摄像头(31)和喷头的delta机器人(3),外连接有四个轮腿组件(2)、内设有传感器(11)、电池和控制模块的主体(1),其特征在于,所述主体(1)的四角设有电机支架(12),该电机支架上固定有肩部电机(13);所述轮腿组件(2)包括腿单元和设置于该腿单元下端的内设轮毂电机的驱动轮(27),该驱动轮(27)的轮轴连接有转向电机(26),腿单元上还设有可驱使其上下摆动的起落装置;当需要轮式行驶或转向时,所述控制模块通过控制四个所述转向电机(26)和四个所述轮毂电机,分别实现驱动轮(27)的转向和转动;当需要越障时,所述控制模块依据所述摄像头(31)的识别信息,控制所述肩部电机(13)实现腿单元的水平摆动,及控制所述起落装置实现驱动轮(27)的抬起或落下;同时,根据所述传感器(11)的监测结果,调节机器人姿态,使其主体(1)始终处于水平状态。2.根据权利要求1所述的一种喷洒用全地形农业机器人,其特征在于,所述腿单元由肩部架(21)、腿杆(24)和轮部架(25)组成,该肩部架(21)与两根平行的所述腿杆(24)和所述轮部架(25)枢接构成平行四边形。3.根据权利要求1所述的一种喷洒用全地形农业机器人,其特征在于,所述控制模块,采用差速转向与独立转向相结合的方式,实现所述驱动轮(27)的360度无死角转向。4.根据权利要求2所述的一种喷洒用全地形农业机器人,其特征在于,所述起落装置包括电推杆(23)和与所述肩部架(21)铰接的推杆支架(22),该电推杆(23)一端铰接在所述平行四边形的一边,另一端固定在推杆支架(22)上。5.根据权利要求2所述的一种喷洒用全地形农业机器人,其特征在于,所述腿杆(24)正面开设有多个长孔。6.根据权利要求1~5之一所述的一种喷洒用全地形农业机器人,其特征在于,所述传感器(11)为陀螺仪,且陀螺仪设置在主体的中心位置。
技术总结
本发明提出一种喷洒用全地形农业机器人,包括主体、轮腿组件、delta机器人;所述主体连接有四个所述轮腿组件,所述主体下方连接所述delta机器人;轮腿组件可实现机器人的越障模式以及轮式行走模式和转向模式,根据不同的地形可实现不同模式切换,该农业机器人兼具轮式与腿式机器人的双重优点,既保证复杂地形条件下行驶稳定性和良好平顺性,又能避免对农作物的干扰,本发明通过delta机器人喷洒药物或水,能高效完成喷洒作业。能高效完成喷洒作业。能高效完成喷洒作业。
技术研发人员:段超 刘红龙 王磊
受保护的技术使用者:塞伯睿机器人技术(南京)有限公司
技术研发日:2022.10.14
技术公布日:2022/11/18
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。