1.本发明涉及辣椒加工设备技术领域,具体公开了一种菜椒去柄脱帽装置。
背景技术:
2.辣椒的种类有很多,例如小米辣、朝天椒、线椒、螺丝椒等,此类的辣椒整体呈长条状,通常用于制备辣椒酱、辣酱油等,而菜椒是一种外形类似灯笼的大体型辣椒,一般是直接作为蔬菜和配菜使用。
3.目前,很多大型饭店一般是直接从农贸商场采购菜椒,然后人工进行去柄脱帽,其不仅劳动强度大,而且耽误饭店的出菜时间,导致部分饭店直接从农贸商场采购现场去柄脱帽后的菜椒,但是现有的辣椒去柄机一般都是用于像小米辣、朝天椒、线椒等长条形的辣椒加工,将其用于菜椒的去柄脱帽处理时,不仅去柄脱帽效果不佳,而且易导致菜椒受压破损,无法保证菜椒去柄脱帽后的完整性。
4.例如申请号为cn2021222390471的实用新型专利就公开了一种滚筒式辣椒去柄装置,包括机架,机架内侧横向固设有搅拌组件,搅拌组件外侧套设有受驱动组件控制转速的滚筒,滚筒底部设有去柄组件,去柄组件置于导向座内侧,弧形罩体和导向座分别竖向固设于机架内侧上、下两端。该滚筒式辣椒去柄装置的去柄原理是通过将辣椒柄穿过筛网,然后再利用切刀定向切除,从而实现了辣椒的去柄过程。但是该类型的滚筒式辣椒去柄装置并不适用于菜椒,主要是因为菜椒体积大、整体较脆,当随着滚筒转动时易引起菜椒受压破损,无法保证去柄后菜椒的完整性;另外该装置只能对辣椒并进行切断,并不具有脱帽的效果,因此该去柄装置只能用于长条形辣椒的去柄,无法实现去柄脱帽的效果。针对现有滚筒式辣椒去柄装置的上述技术问题,本发明提出了一种适用于菜椒加工的去柄脱帽装置。
技术实现要素:
5.本发明旨在于提供一种适用于菜椒加工的去柄脱帽装置,以解决现有辣椒去柄机在对菜椒进行处理时易对导致菜椒破损以及无法脱帽的问题。
6.本发明是通过以下技术方案实现的:一种菜椒去柄脱帽装置,包括机箱座和定位输送装置,所述定位输送装置包括传输座,所述传输座中设置有输送皮带,所述输送皮带上等间隔连接有多个菜椒放置块,且在菜椒放置块上开设有定位槽,所述定位槽中通过复位弹性件连接有夹紧板,所述机箱座上设置有推动驱动件,且推动驱动件的端部连接有移动板,所述移动板上连接有若干顶压杆,若干所述顶压杆与对应菜椒放置块上的顶杆通孔对齐设置;所述机箱座上设置有支撑架板,所述支撑架板的上端设置有伸缩驱动件,且伸缩驱动件的下端连接有升降板,所述升降板上设置有若干与菜椒放置块对齐的椒柄夹持旋转组件,所述椒柄夹持旋转组件包括两个对称设置的夹持块和连接柱,所述连接柱中开设有柱形转动腔,且在柱形转动腔的内壁上开设有两个对称设置的弧形导向槽,两个所述夹持块的上端连接有伸入柱形转动腔中的端块,所述端块上连接有与弧形导向槽相匹配的导向
轮,且在两个端块之间连接有压缩弹性件,所述连接柱上设置有实现两个端块在柱形转动腔中同步旋转的驱动单元。
7.作为上述方案的具体设置,所述驱动单元包括设置在连接柱上端的齿轮箱,所述齿轮箱中设置有伸入柱形转动腔中的转动轴,所述转动轴的下端连接有伸入对应端块上径向通孔中的导向杆,所述齿轮箱上设置有实现转动轴旋转的驱动电机。
8.作为上述方案的进一步设置,所述支撑架板上还设置有椒柄导出机构,所述椒柄导出机构包括两个连接在支撑架板上的纵梁臂,两个所述纵梁臂之间前后移动设置有接料板。
9.作为上述方案的具体设置,两个所述纵梁臂的相对面开设有纵向滑槽,所述接料板的两侧均连接有伸入纵向滑槽中的滑动块,其中一个所述纵梁臂上设置伺服电机,且伺服电机的输出轴上连接有驱动齿轮,所述滑动块上设置有与驱动齿轮相啮合的齿条。
10.作为上述方案的进一步设置,所述机箱座的下料侧端连接有椒体导料斗。
11.作为上述方案的进一步设置,所述机箱座上设置有固定台,所述固定台上设置有对移动板起导向作用的纵向滑轨,所述推动驱动件安装在固定台上。
12.作为上述方案的进一步设置,所述升降板的两端均连接有垂直导杆,所述支撑架板的上端开设有与垂直导杆相匹配的导向孔。
13.作为上述方案的具体设置,所述推动驱动件和伸缩驱动件均为气缸或者液压缸其中的一种。
14.本发明设计的菜椒去柄脱帽装置在使用时,作业人员只需要站在机箱座的上料段将菜椒一个个摆放在菜椒放置块的定位槽中,然后摆放好的菜椒随着输送皮带移动至旋转拔帽机构的正下方,再通过推动驱动件将移动板推动,此时顶压杆穿过对应菜椒放置块上的顶杆通孔,将夹紧板推动,使得夹紧板对菜椒进行夹持固定。
15.在旋转拔帽前,椒柄夹持旋转组件中的两个夹持块在压缩弹性件的作用下张开至最大,此时通过伸缩驱动件将升降板向下推动,定位槽中菜椒的椒柄处于对应两个夹持块之间,然后通过驱动单元的动力输入使得两个夹持块、端块随着转动轴在连接柱的柱形转动腔中旋转,并且在旋转过程中由于导向轮受到弧形导向槽的作用使得两个夹持块、端块逐渐靠近,从而将椒柄夹紧。当椒柄被夹紧后在继续旋转的过程中,能够将椒柄相对菜椒本体发生拧动,使得椒柄与菜椒本体的连接处发生撕裂,然后再通过伸缩驱动件控制升降板向上移动,在移动的过程中将椒柄从菜椒本体中拔脱,实现了菜椒的无损去柄脱帽过程。
16.最后,当菜椒去柄脱帽完成后,接料板移动至椒柄夹持旋转单元的正下方,同时推动驱动件和驱动单元复位,当驱动单元复位后被拔脱的椒柄能够落在接料板上,然后去柄脱帽完的菜椒随着输送皮带从端部排下即可。
17.有益效果:1)本发明设计的菜椒去柄脱帽装置实现了对菜椒的流水化加工作业,在运行时只需要安排一个作业人员进行上料即可,全程实现了去柄、脱帽、帽体分离的等步骤;相比较于人工处理,不仅劳动强度低、对人体带来的伤害低,而且对菜椒的去柄脱帽加工更高效率。
18.2)本发明中的菜椒去柄脱帽装置通过对旋转拔帽机构的特殊结构设计,使其采用了模拟人工对菜椒进行无损去柄的过程。当菜椒输送至椒柄夹持旋转组件正下方时,先对
菜椒和椒柄分别进行夹持固定,然后再对椒柄进行拧动,使得椒柄与菜椒本体的连接处发生撕裂,接着再将椒柄拔起,实现了菜椒的无损去柄脱帽过程,有效降低了菜椒去柄脱帽后的破碎率,极大提高了对菜椒进行去柄脱帽的技术效果。
附图说明
19.为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
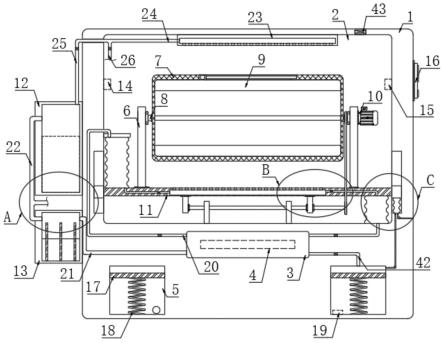
20.图1为本发明的第一角度立体结构示意图;图2为本发明的第二角度立体结构示意图;图3为本发明中菜椒定位输送装置的立体结构示意图;图4为本发明实施例2中菜椒放置块的内部平面结构示意图;图5为本发明中升降板、椒柄夹持旋转单元等立体结构示意图;图6为本发明中椒柄夹持旋转单元的立体结构示意图;图7为本发明中椒柄夹持旋转单元的立体爆炸图;图8为本发明中连接柱的内部平面结构示意图;图9为本发明中椒柄导出机构的立体爆炸图。
具体实施方式
21.为了使本技术领域的人员更好地理解本技术方案,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分的实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本技术保护的范围。
22.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图1~9,并结合实施例来详细说明本技术。
23.实施例1实施例1公开了一种菜椒去柄脱帽装置,参考附图1和附图2,该装置的主体包括机箱座100、菜椒定位输送装置200、旋转拔帽机构300、椒柄导出机构400和椒体导料斗500。该机箱座100由不锈钢板围合而成,并在其下表面连接有若干支脚101,在其前侧面安装有控制箱102。
24.参考附图3,菜椒定位输送装置200包括固定设置在机箱座100上表面的皮带传输座201,在皮带传输座201的左右两端各设置有一个皮带辊,并在两个皮带辊之间设置有输送皮带202,并在皮带传输座201的一端安装有与其中一个皮带辊相连接的皮带电机203,在输送皮带202的外表面等间隔设置有多个菜椒放置块204,并在每个菜椒放置块204的上端开设有定位槽2041。作业人员将待处理的菜椒逐个放在定位槽2041中,然后通过皮带电机203作为动力输入单元,能够实现多个菜椒的定距离输送。
25.参考附图1、附图2和附图5,旋转拔帽机构300包括固定连接在机箱座100上表面一
端的支撑架板301,在支撑架板301的顶端设置有升降气缸302,当然该升降气缸302也可由具有伸缩功能的驱动件替代。在升降气缸302的下端连接有升降板303,通过控制升降气缸302活塞杆的伸长或缩短能够实现升降板303在支撑架板301中的定距离升降。另外,为了实现升降板303的稳定升降,还在升降板303的上端两侧各连接有一根垂直设置的导向杆304,并在支撑架板301的顶端开设有与导向杆304相匹配的导向孔。
26.在升降板303的下端等间隔设置有多个连接杆305,并且相邻两个连接杆305之间的距离与相邻两个菜椒放置块204之间的距离相等。在每个连接杆305的端部均连接有椒柄夹持旋转单元306。具体椒柄夹持旋转单元306的结构设计可参考附图6、附图7和附图8,其包括两个镜像对称设置的夹持块3061,在两个夹持块3061的上方设置有与连接杆305固定连接的连接柱3062,在连接柱3062中开设有柱形转动腔3063,并在柱状转动腔的侧壁上对称开设有两个弧形导向槽3064。在每个夹持块3061的上端均连接有伸入柱形转动腔3063的端块3065,两个端块3065之间连接有压缩弹簧3066,使得在不受外力作用下通过压缩弹簧3066的作用下两个夹持块3061之间处于张开状态,此时菜椒柄能够伸入两个夹持块3061之间。在端块3065的背面均连接有与弧形导向槽3064相匹配的导向轮3067,当两个端块3065同步在柱形转动腔3063中旋转时,由于导向轮3067受到弧形导向槽3064的作用,两个端块3065会逐渐靠拢,直至两个端块3065下端的夹持块3061将菜椒柄完全夹紧后,再继续沿着柱形转动腔3063旋转,能够将菜椒柄进行旋转拧动。
27.同时,还在连接柱3062上设置有驱动两个端块3065同步在柱形转动腔3063中旋转的驱动单元,该驱动单元包括固定连接在连接柱3062上表面的齿轮箱3068,在齿轮箱3068中转动连接有伸入柱形转动腔3063中的转动轴3069,该转动轴3069的下端设置在两个端块3065之间,并在转动轴3069的下端连接有伸入对应端块3065上径向通孔中的导向杆3070。然后在位于齿轮箱3068中的转动轴3069上设置有从动锥齿轮3071,在齿轮箱3068上设置有驱动电机3072,驱动电机3072的输出轴内端连接有主动锥齿轮。上述以驱动电机3072为动力源,在齿轮的啮合传动下使得转动轴3069绕中轴线旋转,在旋转的过程中由于导向杆3070与端块3065上径向通孔之间的作用,能够使得两个端块3065同步在柱形转动腔3063中旋转,并在旋转的过程中两个端块3065能够沿着导向杆3070径向移动,实现对菜椒柄的夹持过程,当两个端块3065靠至最近完成对菜椒柄的夹持后,在继续旋转的过程能够拧动菜椒柄。
28.参考附图1和附图9,椒柄导出机构400包括连接在支撑架板301上的两个纵梁臂401,两个纵梁臂401分别固定连接在升降板303左右两侧的支撑架板301上,在两个纵梁臂401之间前后移动设置有接料板402。具体设置时,在两个纵梁臂401的相对面上开设有限位滑槽403,升降板303的左右两侧面连接有与限位滑槽403相匹配的滑动块404,并在其中一个滑动块404上设置有齿条4041,然后在该纵梁臂401上设置有伺服电机405,并在伺服电机405的输出轴上连接有驱动齿轮406,通过控制伺服电机405的正反转以及驱动齿轮406与齿条4041的啮合作用,能够使得接料板402能够在两个纵梁臂401之间前后往复运动。最后,将椒体导料斗500固定焊接在机箱座100的右侧面上端,用于接收从菜椒放置块204中脱落的菜椒,并将其下料过程中进行导向输送。
29.实施例2实施例2公开了一种以实施例1为基础进行改进设计的菜椒去柄脱帽装置,该改进
点是为了避免菜椒在旋转拔帽时从定位槽2041中滑脱或发生旋转的情况,本实施例2与实施例1相同之处不做再次说明,其不同之处可参考附图3和附图4。
30.在菜椒放置块204的前侧面均开设有顶杆通孔2042,并在定位槽2041的前侧内壁开设有收纳槽2043,在收纳槽2043中通过复位弹性件2044连接有夹持板2045,该夹紧板2045可由橡胶材料制成,使其具有较高摩擦系数的同时,还因自身柔软性防止夹持力过大对菜椒造成压损。
31.在位于支撑架板301前侧的机箱座100上表面设置有固定台600,在固定台600的上表面固定安装有伸缩推动件601,该伸缩推动件601可选用气缸或者液压缸。同时在固定台600的上表面设置有纵向滑轨602,在纵向滑轨602上滑动设置有移动板603,并且移动板603的一端与伸缩推动件601相连接,在移动板603朝向菜椒定位输送装置200的侧面上等间隔连接有若干顶压杆604,每相邻的两个顶压杆604之间的距离与相邻两个菜椒放置块204之间的距离相等。
32.当待处理的菜椒在菜椒定位输送装置200的作用下移动至旋转拔帽机构300处时,在对菜椒进行旋转拔帽处理前,先通过伸缩推动件601的作用将移动板603向菜椒定位输送装置200一侧移动,然后移动板603上的若干顶压杆604穿过菜椒放置块204上的顶杆通孔2042将夹紧板2044推入到定位槽2041中,从而将定位槽2041中的菜椒进行夹持,防止后续椒柄夹持旋转单元306对菜椒柄进行旋转时发生转动,以及在后续拔帽过程中发生滑脱。
33.以上仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。