1.本发明涉及建筑工程的技术领域,具体是一种用于土方作业的工程车载土体积测量方法。
背景技术:
2.土方作业一般工作量比较大,工期比较长,主要包括挖梆、填筑、运输等,现有技术一边挖土一边运输,通常都是定期跟进进度,例如总工程师在一周、十天或半月考查一次工程进度,平时对于挖土量的估算误差较大,加上天气等因素影响,往往延误较长时间的工期。
3.故此亟需开发一种用于土方作业的工程车载土体积测量方法来解决现有技术中的问题。
技术实现要素:
4.本发明的目的在于提供一种用于土方作业的工程车载土体积测量方法,能够便于实时监测挖土运输的工程进度,降低工期判断的误差,且结构简单,成本低,以解决上述背景技术中提出的问题。
5.为实现上述目的,本发明提供如下技术方案:
6.一种用于土方作业的工程车载土体积测量方法,所述方法包括如下步骤:s1:载土方施工工地前设置车辆检测门,所述车辆检测门上设置红外光栅车辆识别器和激光扫描仪,并在车辆检测门出设置电脑终端,所述红外光栅车辆识别器和激光扫描仪将采集的信息输送给电脑终端;
7.s2:通过红外光栅车辆识别器识别工程车辆型号及车牌,并通过激光扫描仪扫描工程车载土量;
8.s3:将红外光栅车辆识别器及激光扫描仪将采集的信息输送给电脑终端,再由电脑终端分析相关数据并模拟载土量模型;
9.s4:电脑终端对模拟后的模型进行分割成若干份,再根据每一份分割的模型进行积分计算出体积,之后求和计算出整个模型的体积;
10.s5:并将对应车辆、对应时间及对应载土量记录并保存。
11.作为本发明进一步的方案:步骤s1中所述红外光栅车辆识别器和激光扫描仪与所述电脑终端通过电信号或无线信号连接。
12.作为本发明进一步的方案:步骤s2中红外光栅车辆识别器识别工程车辆型号及车牌,将采集的信息输送给电脑终端,便于电脑终端对该工程车辆的信息和运输时间记录和保存。
13.作为本发明进一步的方案:步骤s2中激光扫描仪扫描工程车载土量,将采集的信息输送给电脑终端,便于电脑终端对该工程车辆的信息进行匹配,并记录和保存对应时间运输的载土量。
14.作为本发明进一步的方案:步骤s3中电脑终端对模拟后的模型进行网格化,之后对网格化的模型进行最优间距分割。
15.作为本发明进一步的方案:步骤s4中电脑终端对分割后的模型进行分割面的平滑预处理及分割面的平滑处理。
16.作为本发明进一步的方案:对平滑处理后的若干份分割模型逐一进行分割面积网格化,并根据网格化的单独分割模型的网格计算近似面积,再根据对应单独分割模型的宽度计算对应单独分割模型的体积。
17.作为本发明进一步的方案:将若干单独分割模型的体积求和计算出整个模型的体积。
18.与现有技术相比,本发明的有益效果是:能够便于实时监测挖土运输的工程进度,降低工期判断的误差,且结构简单,成本低。
19.本发明的其他特点和优点将会在下面的具体实施方式、附图中详细的揭露。
附图说明
20.图1是本发明实施例中施工工地及相关设施的一种结构简图;
21.图2是本发明实施例中工程车载土量的一种模拟图;
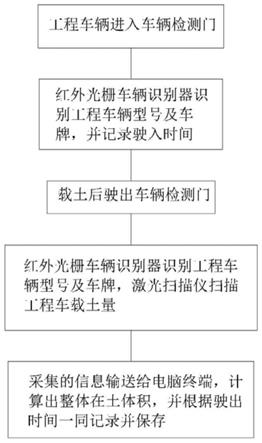
22.图3是本发明实施例中工程车载土体积测量方法的流程框图。
23.图中各附图标记为:施工工地1,工程车2,车辆检测门3,红外光栅车辆识别器31,激光扫描仪32,电脑终端4。
具体实施方式
24.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
25.本发明实施例中,一种用于土方作业的工程车载土体积测量方法,参见图1
‑
3所示,所述方法包括如下步骤:
26.s1:载土方施工工地1前设置车辆检测门3,所述车辆检测门3上设置红外光栅车辆识别器31和激光扫描仪32,并在车辆检测门3出设置电脑终端4,所述红外光栅车辆识别器31和激光扫描仪32将采集的信息输送给电脑终端4;
27.s2:通过红外光栅车辆识别器31识别工程车2型号及车牌,并通过激光扫描仪32扫描工程车2的载土量;
28.s3:将红外光栅车辆识别器31及激光扫描仪32将采集的信息输送给电脑终端4,再由电脑终端4分析相关数据并模拟载土量模型;
29.s4:电脑终端4对模拟后的模型进行分割成若干份,再根据每一份分割的模型进行积分计算出体积,之后求和计算出整个模型的体积;
30.s5:并将对应车辆、对应时间及对应载土量记录并保存。
31.在本实施例中,步骤s1中所述红外光栅车辆识别器31和激光扫描仪32与所述电脑终端4通过电信号或无线信号连接。步骤s2中红外光栅车辆识别器31识别工程车2型号及车
牌,将采集的信息输送给电脑终端4,便于电脑终端4对该工程车2的信息和运输时间记录和保存。步骤s2中激光扫描仪32扫描工程车2的载土量,将采集的信息输送给电脑终端4,便于电脑终端4对该工程车2的信息进行匹配,并记录和保存对应时间运输的载土量。
32.在本实施例中,步骤s3中电脑终端4对模拟后的模型进行网格化,之后对网格化的模型进行最优间距分割。步骤s4中电脑终端4对分割后的模型进行分割面的平滑预处理及分割面的平滑处理。对平滑处理后的若干份分割模型逐一进行分割面积网格化,并根据网格化的单独分割模型的网格计算近似面积,再根据对应单独分割模型的宽度计算对应单独分割模型的体积。将若干单独分割模型的体积求和计算出整个模型的体积。
33.在本实施例中,工程车2进入车辆检测门3时,红外光栅车辆识别器31识别工程车2的型号及车牌,并记录驶入时间;载土后驶出车辆检测门3,红外光栅车辆识别器31识别工程车2的型号及车牌,激光扫描仪32扫描工程车2的载土量,采集的信息输送给电脑终端4,由电脑终端4计算出整体载土体积,并根据驶出时间一同记录并保存,工地负责人可以通过云端远程连接接收电脑终端4记录和保存的工程车2载土运输的数据,计算出工期进度,便于实时监测挖土运输的工程进度,降低工期判断的误差。
34.本发明提供了一种用于土方作业的工程车载土体积测量方法,能够便于实时监测挖土运输的工程进度,降低工期判断的误差,且结构简单,成本低,可靠性高。
35.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
36.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。