1.本发明涉及电解铝领域,具体涉及延展可变形电解铝炉灰刮除机。
背景技术:
2.工业上铝都是采用电解法生产的,铝电解工业生产采用霍尔-埃鲁冰晶石-氧化铝融盐电解法,即以冰晶石为主的氟化盐作为熔剂,氧化铝为熔质组成多相电解质体系,其中na2alf6-al2o3二元系和na3alf6-alf3-al2o3三元系是工业电解质的基础。
3.电解铝炉在电解铝的过程中会炉灰,大量的炉灰积攒在电解铝炉中会严重影响电解铝的加工过程,传统的去除炉灰的方法大多为手动去除,手工去除炉灰的方式费时费力并且极大的增加了工厂的生产成本,而现有技术下的炉灰去除设备存在诸多缺陷,难以有效对电解铝炉中的炉灰进行充分去除。
4.本发明所设计的延展可变形电解铝炉灰刮除机能够对电解铝过程中产生的炉灰进行全自动刮除,除此之外,本发明能够对电解铝炉中各个角落的炉灰进行充分刮除,本发明既解决了手动去除炉灰造成的效率低下的问题又解决了现有技术下炉灰去除设备刮除炉灰不充分的问题。
技术实现要素:
5.为解决现有技术的不足,本发明的目的是提供延展可变形电解铝炉灰刮除机,本发明所设计的延展可变形电解铝炉灰刮除机能够对电解铝过程中产生的炉灰进行全自动刮除,除此之外,本发明能够对电解铝炉中各个角落的炉灰进行充分刮除,本发明既解决了手动去除炉灰造成的效率低下的问题又解决了现有技术下炉灰去除设备刮除炉灰不充分的问题;为实现上述技术目的,本发明所采用的技术方案如下。
6.延展可变形电解铝炉灰刮除机,其包括刮灰装置、控制装置,刮灰装置用于刮除电解铝炉中的炉灰,控制装置用于牵引刮灰装置运动以及配合刮灰装置刮除电解铝炉中的炉灰。
7.作为上述技术方案的进一步改进与优化。
8.所述刮灰装置包括平移机构、刮灰机构,平移机构用于牵引刮灰机构沿水平方向运动,刮灰机构用于刮除电解铝炉中的炉灰;所述平移机构包括支撑架、滑动架、第一平移组件、第二平移组件。
9.作为上述技术方案的进一步改进与优化。
10.所述第二平移组件包括第二平移电机、第二丝杆;所述第二丝杆的轴线水平布置,第二丝杆活动安装于支撑架上,第二丝杆沿自身轴线方向分为第一螺纹段、光滑段、第二螺纹段,第一螺纹段和第二螺纹段的长度相等、螺纹方向相反,光滑段位于第一螺纹段和第二螺纹段之间,光滑段上同轴设置有第二锥齿轮;所述第二平移电机安装于支撑架上,第二平移电机的输出端同轴设置有第一齿
轮,支撑架上活动安装有连轴杆,连轴杆的轴线水平布置并且垂直于第二丝杆的轴线,连轴杆上同轴设置有第二齿轮和第一锥齿轮,第一齿轮和第二齿轮啮合连接,第一锥齿轮与第二锥齿轮啮合连接;所述滑动架沿第二丝杆的轴线方向对称设置有两个,第一螺纹段的外部与第二螺纹段的外部各套设有一个滑动架,滑动架与支撑架滑动连接且两者之间构成引导方向沿第二丝杆轴向的滑动导向配合。
11.作为上述技术方案的进一步改进与优化。
12.所述第一平移组件包括第一平移电机、传动杆、第一丝杆;所述传动杆活动安装于支撑架上,传动杆的轴线平行于第二丝杆的轴线,传动杆上同轴设置有第四锥齿轮和两个第五锥齿轮;第一平移电机安装于支撑架上,第一平移电机的输出端同轴设置有第三锥齿轮,第三锥齿轮与第四锥齿轮啮合连接;所述第一丝杆活动安装于滑动架上,第一丝杆的轴线水平布置并且垂直于传动杆的轴线,第一丝杆对应设置有两个,第一丝杆的一端同轴设置有第六锥齿轮,第六锥齿轮对应设置有两个,第六锥齿轮与第五锥齿轮啮合连接;所述传动杆与第五锥齿轮之间通过连动件连接,所述的连动件为设置于传动杆的外花键和设置于第五锥齿轮内圆面的内花键。
13.作为上述技术方案的进一步改进与优化。
14.所述刮灰机构设置有两个,两个刮灰机构位于两个滑动架相互背离的一侧,刮灰机构包括安装壳、定位壳、伸缩组件、复位组件;所述安装壳与滑动架滑动连接且两者之间构成引导方向沿第一丝杆长度方向的滑动导向配合。
15.作为上述技术方案的进一步改进与优化。
16.所述伸缩组件包括连通管、运动件;所述连通管呈一端开口、一端封闭的管状结构,连通管的长度方向平行于第一丝杆的轴线,连通管安装于定位壳上;所述运动件对称分布于连通管长度方向的两侧,且连通管的每一侧设置有两个运动件,运动件包括第一限位筒、第二限位筒、第三限位筒、第四限位筒;所述第一限位筒呈一端开口一端封闭的圆形筒体结构,第一限位筒安装于安装壳上,第一限位筒的轴线垂直于连通管的长度方向,第一限位筒的封闭端设置有进气管,进气管与第一限位筒连接接通,第一限位筒的开口端同轴向内延伸设置有第一台阶。
17.作为上述技术方案的进一步改进与优化。
18.所述第二限位筒呈两端开口的圆形筒体结构,第二限位筒与第一限位筒同轴布置,第二限位筒靠近第一限位筒的一端同轴向外延伸设置有第二台阶,第二限位筒通过第二台阶与第一限位筒滑动连接且两者之间构成引导方向沿第二限位筒轴线方向的滑动导向配合,第二限位筒背离第一限位筒的一端同轴向内延伸设置有第三台阶;所述第三限位筒呈两端开口的圆形筒体结构,第三限位筒与第二限位筒同轴布置,第三限位筒靠近第二限位筒的一端同轴向外延伸设置有第四台阶,第三限位筒通过第四台阶与第二限位筒滑动连接且两者之间构成引导方向沿第三限位筒轴线方向的滑动导
向配合,第三限位筒背离第二限位筒的一端同轴向内延伸设置有第五台阶;所述第四限位筒呈一端开口、一端封闭的圆形筒体结构,第四限位筒与第三限位筒同轴布置,第四限位筒的开口端同轴向外延伸设置有第六台阶,第四限位筒通过第六台阶与第三限位筒滑动连接且两者之间构成引导方向沿第四限位筒轴向的滑动导向配合,第四限位筒的封闭端设置有伸缩弹簧。
19.作为上述技术方案的进一步改进与优化。
20.所述定位壳上设置有用于刮除电解铝炉中炉灰的刮灰刀;所述伸缩弹簧的一端与第四限位筒的封闭端连接、另一端与定位壳连接,伸缩弹簧的弹力驱使刮灰刀与电解铝炉的内壁贴合,位于同一侧的两个伸缩弹簧共同连接一个定位壳,每个刮灰机构对应包括有两个定位壳;所述伸缩组件设置为相互切换的收拢转态和伸展状态,并且伸缩组件的初始状态为收拢转态,当伸缩组件处于收拢转态时,第二限位筒位于第一限位筒内部,第三限位筒位于第二限位筒内部,第四限位筒位于第三限位筒内部,当伸缩组件处于收拢转态处于伸展状态时,第一台阶与第二台阶相抵触、第三台阶与第四台阶相抵触、第五台阶与第六台阶相抵触。
21.作为上述技术方案的进一步改进与优化。
22.所述复位组件包括固定板、第四限位筒、牵引件;所述固定板和第四限位筒均固定安装于安装壳内部,第四限位筒同轴套设于第一丝杆的外部;所述牵引件对称分布于连通管长度方向的两侧,且连通管的两侧各设置有一个牵引件,牵引件包括穿设杆、牵引绳、第三齿轮、第四齿轮、第二导向轮,牵引绳用于牵引伸缩组件回到初始状态;所述穿设杆的轴线平行于第一丝杆的轴线,穿设杆的两端活动安装于安装壳上,固定板套设于穿设杆外部,穿设杆上同轴设置有若干第一导向轮,穿设杆上还同轴设置有用于为牵引绳提供动力的卷簧;所述第二导向轮与第一导向轮相匹配,并且对应设置有若干个,第二导向轮活动安装于安装壳上;所述牵引绳的一端与第一导向轮连接、另一端与定位壳连接,牵引绳对应设置有若干个,位于同一侧的牵引绳与伸缩弹簧共同连接有一个定位壳;所述第三齿轮同轴设置于穿设杆外部,第四齿轮安装于固定板上,第四齿轮与第三齿轮啮合连接,同一复位组件的两个第三齿轮啮合连接。
23.作为上述技术方案的进一步改进与优化。
24.控制装置包括移动机构、进气机构、竖移机构,移动机构用于牵引刮灰装置向靠近电解铝炉或远离电解铝炉的方向运动,进气机构用于为伸缩组件由收拢状态切换至伸展状态提供动力,竖移机构用于驱动刮灰装置沿竖直方向运动;所述移动机构包括车体和万向轮,万向轮安装于车体上,万向轮用于控制车体向任意水平方向运动;所述进气机构包括气泵、气压管道,气泵安装于车体上,气压管道的一端与的连通管的开口端连接、另一端与气泵连接;所述竖移机构包括竖移架、触发板、竖移电机、第三丝杆;
所述竖移架竖直布置,竖移架固定安装于车体上;所述第三丝杆竖直布置,第三丝杆活动安装于竖移架上并绕自身轴线转动,第三丝杆沿垂直于自身轴线的方向设置有两个;所述触发板套设于第三丝杆外部,触发板对应设置有两个,触发板与竖移架滑动连接且两者之间构成引导方向沿第三丝杆轴向的滑动导向配合,两个触发板与支撑架固定连接;所述竖移电机安装于车体上,竖移电机的输出端与第三丝杆的输入端之间设置有用于实现两者之间动力传递的动力传递件。
25.本发明与现有技术相比的有益效果在于:本发明所采用的延展可变形方式能够对电解铝过程中产生的炉灰进行全自动刮除,除此之外,本发明能够对电解铝炉中各个角落的炉灰进行充分刮除,本发明既解决了手动去除炉灰造成的效率低下的问题又解决了现有技术下炉灰去除设备刮除炉灰不充分的问题。
26.本发明的刮灰刀在竖移电机、第一平移电机、第二平移电机的相互配合下能够沿电解铝炉的内壁进行多方位运动,从而充分刮除电解铝炉中的炉灰。
27.本发明刮灰机构的伸缩组件可在收拢状态和伸展状态之间相互切换,多状态切换的伸缩组件使得刮灰刀对电解铝炉灰的刮除更为充分。
附图说明
28.图1为本发明与电解铝炉的整体结构示意图。
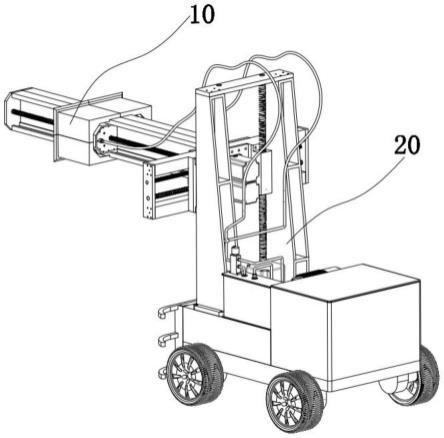
29.图2为本发明的整体结构示意图。
30.图3为本发明的刮灰装置示意图。
31.图4为本发明的刮灰装置示意图。
32.图5为本发明的平移机构示意图。
33.图6为本发明的平移机构部分结构示意图。
34.图7为本发明的平移机构部分结构示意图。
35.图8为本发明的平移机构部分结构示意图。
36.图9为本发明的刮灰机构示意图。
37.图10为本发明的刮灰机构示意图。
38.图11为本发明的伸缩组件与复位组件示意图。
39.图12为本发明的伸缩组件示意图。
40.图13为本发明的伸缩组件部分结构示意图。
41.图14为本发明的复位组件示意图。
42.图15为本发明的复位组件示意图。
43.图16为本发明的控制装置示意图。
44.图17为本发明的竖移机构示意图。
45.图中标示为:10、刮灰装置;11、平移机构;111、支撑架;112、滑动架;113、第一平移电机;114、第二平移电机;
115、传动杆;116、第一丝杆;117、第二丝杆;12、刮灰机构;121、安装壳;122、定位壳;123、刮灰刀;124、伸缩组件;1241、连通管;1242、进气管;1243、第一限位筒;1244、第二限位筒;1245、第三限位筒;1246、第四限位筒;125、复位组件;1251、固定板;1252、穿设杆;1253、第一导向轮;1254、第二导向轮;1255、牵引绳;1256、第四限位筒;20、控制装置;21、移动机构;22、进气机构;23、竖移机构;231、竖移架;232、触发板;233、竖移电机;234、第三丝杆。
具体实施方式
46.下面对照附图,通过对实施例的描述,对本发明的具体实施方式作进一步详细的说明,目的是帮助本领域的技术人员对本发明的构思、技术方案有更完整、准确和深入的理解,并有助于其实施。
47.延展可变形电解铝炉灰刮除机,其包括刮灰装置10、控制装置20,刮灰装置10用于刮除电解铝炉中的炉灰,控制装置20用于牵引刮灰装置10运动以及配合刮灰装置10刮除电解铝炉中的炉灰。
48.所述刮灰装置10包括平移机构11、刮灰机构12,平移机构11用于牵引刮灰机构12沿水平方向运动,刮灰机构12用于刮除电解铝炉中的炉灰。
49.所述平移机构11包括支撑架111、滑动架112、第一平移组件、第二平移组件。
50.所述第二平移组件包括第二平移电机114、第二丝杆117。
51.所述第二丝杆117的轴线水平布置,第二丝杆117活动安装于支撑架111上,第二丝杆117沿自身轴线方向分为第一螺纹段、光滑段、第二螺纹段,第一螺纹段和第二螺纹段的长度相等、螺纹方向相反,光滑段位于第一螺纹段和第二螺纹段之间,光滑段上同轴设置有第二锥齿轮。
52.所述第二平移电机114安装于支撑架111上,第二平移电机114的输出端同轴设置有第一齿轮,支撑架111上活动安装有连轴杆,连轴杆的轴线水平布置并且垂直于第二丝杆117的轴线,连轴杆上同轴设置有第二齿轮和第一锥齿轮,第一齿轮和第二齿轮啮合连接,第一锥齿轮与第二锥齿轮啮合连接。
53.所述滑动架112沿第二丝杆117的轴线方向对称设置有两个,第一螺纹段的外部与第二螺纹段的外部各套设有一个滑动架112,滑动架112与支撑架111滑动连接且两者之间构成引导方向沿第二丝杆117轴向的滑动导向配合。
54.所述第一平移组件包括第一平移电机113、传动杆115、第一丝杆116。
55.所述传动杆115活动安装于支撑架111上,传动杆115的轴线平行于第二丝杆117的轴线,传动杆115上同轴设置有第四锥齿轮和两个第五锥齿轮。
56.第一平移电机113安装于支撑架111上,第一平移电机113的输出端同轴设置有第三锥齿轮,第三锥齿轮与第四锥齿轮啮合连接。
57.所述第一丝杆116活动安装于滑动架112上,第一丝杆116的轴线水平布置并且垂直于传动杆115的轴线,第一丝杆116对应设置有两个,第一丝杆116的一端同轴设置有第六
锥齿轮,第六锥齿轮对应设置有两个,第六锥齿轮与第五锥齿轮啮合连接。
58.所述传动杆115与第五锥齿轮之间通过连动件连接,所述的连动件为设置于传动杆115的外花键和设置于第五锥齿轮内圆面的内花键,当第五锥齿轮沿传动杆115的轴线方向位移时,传动杆115通过连动件持续向第五锥齿轮传递动力。
59.所述刮灰机构12设置有两个,两个刮灰机构12位于两个滑动架相互背离的一侧,刮灰机构12包括安装壳121、定位壳122、伸缩组件124、复位组件125。
60.所述安装壳121与滑动架112滑动连接且两者之间构成引导方向沿第一丝杆116长度方向的滑动导向配合。
61.所述伸缩组件124包括连通管1241、运动件。
62.所述连通管1241呈一端开口、一端封闭的管状结构,连通管1241的长度方向平行于第一丝杆116的轴线,连通管1241安装于定位壳122上。
63.所述运动件对称分布于连通管1241长度方向的两侧,且连通管1241的每一侧设置有两个运动件,运动件包括第一限位筒1243、第二限位筒1244、第三限位筒1245、第四限位筒1246。
64.所述第一限位筒1243呈一端开口一端封闭的圆形筒体结构,第一限位筒1243安装于安装壳121上,第一限位筒1243的轴线垂直于连通管1241的长度方向,第一限位筒1243的封闭端设置有进气管1242,进气管1242与第一限位筒1243连接接通,第一限位筒1243的开口端同轴向内延伸设置有第一台阶。
65.所述第二限位筒1244呈两端开口的圆形筒体结构,第二限位筒1244与第一限位筒1243同轴布置,第二限位筒1244靠近第一限位筒1243的一端同轴向外延伸设置有第二台阶,第二限位筒1244通过第二台阶与第一限位筒1243滑动连接且两者之间构成引导方向沿第二限位筒1244轴线方向的滑动导向配合,第二限位筒1244背离第一限位筒1243的一端同轴向内延伸设置有第三台阶。
66.所述第三限位筒1245呈两端开口的圆形筒体结构,第三限位筒1245与第二限位筒1244同轴布置,第三限位筒1245靠近第二限位筒1244的一端同轴向外延伸设置有第四台阶,第三限位筒1245通过第四台阶与第二限位筒1244滑动连接且两者之间构成引导方向沿第三限位筒1245轴线方向的滑动导向配合,第三限位筒1245背离第二限位筒1244的一端同轴向内延伸设置有第五台阶。
67.所述第四限位筒1246呈一端开口、一端封闭的圆形筒体结构,第四限位筒1246与第三限位筒1245同轴布置,第四限位筒1246的开口端同轴向外延伸设置有第六台阶,第四限位筒1246通过第六台阶与第三限位筒1245滑动连接且两者之间构成引导方向沿第四限位筒1246轴向的滑动导向配合,第四限位筒1246的封闭端设置有伸缩弹簧。
68.所述定位壳122上设置有用于刮除电解铝炉中炉灰的刮灰刀123。
69.所述伸缩弹簧的一端与第四限位筒1246的封闭端连接、另一端与定位壳122连接,伸缩弹簧的弹力驱使刮灰刀123与电解铝炉的内壁贴合,位于同一侧的两个伸缩弹簧共同连接一个定位壳122,每个刮灰机构12对应包括有两个定位壳122。
70.所述伸缩组件124设置为相互切换的收拢转态和伸展状态,并且伸缩组件124的初始状态为收拢转态,当伸缩组件124处于收拢转态时,第二限位筒1244位于第一限位筒1243内部,第三限位筒1245位于第二限位筒1244内部,第四限位筒1246位于第三限位筒1245内
部,当伸缩组件124处于收拢转态处于伸展状态时,第一台阶与第二台阶相抵触、第三台阶与第四台阶相抵触、第五台阶与第六台阶相抵触。
71.所述复位组件125包括固定板1251、第四限位筒1256、牵引件。
72.所述固定板1251和第四限位筒1256均固定安装于安装壳121内部,第四限位筒1256同轴套设于第一丝杆116的外部。
73.所述牵引件对称分布于连通管1241长度方向的两侧,且连通管1241的两侧各设置有一个牵引件,牵引件包括穿设杆1252、牵引绳1255、第三齿轮、第四齿轮、第二导向轮1254,牵引绳1255用于牵引伸缩组件124回到初始状态。
74.所述穿设杆1252的轴线平行于第一丝杆116的轴线,穿设杆1252的两端活动安装于安装壳121上,固定板1251套设于穿设杆1252外部,穿设杆1252上同轴设置有若干第一导向轮1253,穿设杆1252上还同轴设置有用于为牵引绳125提供动力的卷簧。
75.所述第二导向轮1254与第一导向轮1253相匹配,并且对应设置有若干个,第二导向轮1254活动安装于安装壳121上。
76.所述牵引绳1255的一端与第一导向轮1253连接、另一端与定位壳122连接,牵引绳对应设置有若干个,位于同一侧的牵引绳与伸缩弹簧共同连接有一个定位壳122。
77.所述第三齿轮同轴设置于穿设杆1252外部,第四齿轮安装于固定板1251上,第四齿轮与第三齿轮啮合连接,同一复位组件125的两个第三齿轮啮合连接。
78.刮灰装置10的工作过程,具体表现为:控制装置20驱动刮灰装置10向靠近电解炉的方向运动;开启第一平移电机113,第一平移电机113通过第三锥齿轮和第四锥齿轮驱动驱动传动杆115绕自身轴线转动,传动杆115转动并通过第五锥齿轮和第六锥齿轮驱动第一丝杆116绕自身轴线同步转动,第一丝杆116转动并驱动刮灰机构12沿第一丝杆116的轴线运动至电解铝炉内部;刮灰机构12的伸缩组件124在控制装置20的驱动下由收拢状态向伸展状态切换,第四限位筒1246沿自身轴线向背离第三限位筒1245的方向运动,第四限位筒1246运动并通过第六台阶与第五台阶的配合驱动第三限位筒1245沿自身轴线向背离第二限位筒1244的方向同步运动,第三限位筒1245运动并通过第四台阶与第三台阶的配合驱动第二限位筒1244沿自身轴线向背离第一限位筒1243的方向同步运动,当第一台阶与第二台阶相抵触时,伸缩组件124由收拢状态切换至伸展状态;开启第二平移电机114,第二平移电机114通过第一齿轮、第二齿轮、第一锥齿轮、第二锥齿轮驱动第二丝杆117绕自身轴线转动,第二丝杆117转动并驱动两个滑动架112沿第二丝杆117的轴线同步做相互背离或靠近的运动,滑动架112运动并驱动两个刮灰机构12同步做相互背离或靠近的运动,控制装置20驱动刮灰装置10沿竖直方向运动,刮灰装置10的两个刮灰机构12沿竖直方向同步运动,第一平移电机113驱动两个刮灰机构12沿第一丝杆116的轴线运动,在控制装置20、第一平移电机113、第二平移电机114的相互配合下,刮灰机构12的刮灰刀123将电解铝炉中的炉灰刮除;刮灰处理完成后,控制装置20切断对伸缩组件124的动力,穿设杆1252在卷簧的驱动下绕自身轴线转动,穿设杆1252转动并通过第一导向轮、第二导向轮、牵引绳将伸缩组件124由伸展状态切换至收拢状态,控制装置20再驱动刮灰装置10向远离电解炉的方向运动。
79.控制装置20包括移动机构21、进气机构22、竖移机构23,移动机构21用于牵引刮灰装置10向靠近电解铝炉或远离电解铝炉的方向运动,进气机构22用于为伸缩组件124由收拢状态切换至伸展状态提供动力,竖移机构23用于驱动刮灰装置10沿竖直方向运动。
80.所述移动机构21包括车体和万向轮,万向轮安装于车体上,万向轮用于控制车体向任意水平方向运动,万向轮为现有技术,在此不再赘述。
81.所述进气机构22包括气泵、气压管道,气泵安装于车体上,气压管道的一端与的连通管的开口端连接、另一端与气泵连接。
82.所述竖移机构23包括竖移架231、触发板232、竖移电机232、第三丝杆234。
83.所述竖移架231竖直布置,竖移架231固定安装于车体上。
84.所述第三丝杆234竖直布置,第三丝杆234活动安装于竖移架231上并绕自身轴线转动,第三丝杆234沿垂直于自身轴线的方向设置有两个。
85.所述触发板232套设于第三丝杆234外部,触发板232对应设置有两个,触发板232与竖移架231滑动连接且两者之间构成引导方向沿第三丝杆234轴向的滑动导向配合,两个触发板232与支撑架111固定连接。
86.所述竖移电机233安装于车体上,竖移电机233的输出端与第三丝杆234的输入端之间设置有用于实现两者之间动力传递的动力传递件,优选的,所述的动力传递件为带传动结构。
87.实际工作时,控制装置20的万向轮驱动刮灰装置10向靠近电解铝炉的方向运动,再开启第一平移电机113,第一平移电机113通过第三锥齿轮和第四锥齿轮驱动驱动传动杆115绕自身轴线转动,传动杆115转动并通过第五锥齿轮和第六锥齿轮驱动第一丝杆116绕自身轴线同步转动,第一丝杆116转动并驱动刮灰机构12沿第一丝杆116的轴线运动至电解铝炉内部;开启进气机构22的气泵,气体由气压管道、连通管1241、进气管1242进入第四限位筒1246内部,刮灰机构12的伸缩组件124在气体的驱动下由收拢状态向伸展状态切换,第四限位筒1246沿自身轴线向背离第三限位筒1245的方向运动,第四限位筒1246运动并通过第六台阶与第五台阶的配合驱动第三限位筒1245沿自身轴线向背离第二限位筒1244的方向同步运动,第三限位筒1245运动并通过第四台阶与第三台阶的配合驱动第二限位筒1244沿自身轴线向背离第一限位筒1243的方向同步运动,当第一台阶与第二台阶相抵触时,伸缩组件124由收拢状态切换至伸展状态;开启第二平移电机114,第二平移电机114通过第一齿轮、第二齿轮、第一锥齿轮、第二锥齿轮驱动第二丝杆117绕自身轴线转动,第二丝杆117转动并驱动两个滑动架112沿第二丝杆117的轴线同步做相互背离或靠近的运动,滑动架112运动并驱动两个刮灰机构12同步做相互背离或靠近的运动,开启竖移电机233,竖移电机233通过动力传递件驱动第三丝杆234绕自身轴线转动,第三丝杆234转动并通过触发板232驱动刮灰装置10沿竖直方向运动,刮灰装置10的两个刮灰机构12沿竖直方向同步运动,第一平移电机113驱动两个刮灰机构12沿第一丝杆116的轴线运动,在竖移电机233、第一平移电机113、第二平移电机114的相互配合下,刮灰机构12的刮灰刀123将电解铝炉中的炉灰刮除;刮灰处理完成后,关闭竖移电机233、第一平移电机113、第二平移电机114、气泵,穿设杆1252在卷簧的驱动下绕自身轴线转动,穿设杆1252转动并通过第一导向轮、第二导
向轮、牵引绳将伸缩组件124由伸展状态切换至收拢状态,控制装置20的万向轮再驱动刮灰装置10向远离电解炉的方向运动。
88.以上结合附图对本发明进行了示例性描述。显然,本发明具体实现并不受上述方式的限制。只要是采用了本发明的方法构思和技术方案进行的各种非实质性的改进;或未经改进,将本发明的上述构思和技术方案直接应用于其它场合的,均在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。