1.本发明涉及物流运输技术领域,具体为一种物流系统用运输放件机器人。
背景技术:
2.随着社会经济的日益发展,科学技术不断进步,机器人逐渐应用到我们的日常生产生活中,特别是物流得到了迅速的发展,物流是物品从供应地向接收地的实体流动过程中,根据实际需要,将运输、储存、装卸搬运、包装、流通加工、配送和信息处理等功能有机结合起来实现用户要求的过程,物流装卸搬运是从一个生产场所运往另一个场所。目前市场物流货运搬运大多都是利用人工搬运或者是叉车进行搬运,再或者是利用机器人进行搬运,人工搬运劳动量大,生产效率较为低下;叉车进行搬运也需要人工进行驾驶操作,工作效率一般;但是现有的搬运机器人结构相对比较简单和功能比较单一,而且机器人搬运货物一旦滑落极易伤害到人。
3.公开号为cn111727158b的中国发明专利公开了一种机器人物件取放和运输设备,包括至少一个物件取放机构,该物件取放机构在被存储时,相对于其平台进行物体的装载或卸载时,能实现最小地暴露。致动器和可移动工具的主要部分布置在平台下方。物体的装载包括横向滑动,当物体被外部支撑表面支撑时,通过拉动进行装卸载。物件取放机构的主要部分保留在平台的中央目标区域以外,以提供用于保持物体的不受阻碍或受最小阻碍的平台表面。该设备至少与一个可移动的托盘构件一起使用。但是该现有技术中的取件机器人需要同托盘一起实现取件,在取放过程中难免会送入或者取出货架内货品,而货架的行程范围较大,且工作过程未能实现存取件多种功能,以及实现联动,在大型物流运输场地工作时,存放件工作效率低。
技术实现要素:
4.针对上述技术问题,本发明设置了包括移送组件、储存组件、取放组件、隔离板,移送组件将取放组件上的包裹移送至出口,储存组件将包裹储存在存储舱内,当需要取出时,取放组件开始工作,首先移动到预定位置,将包裹从存储仓内放置到移送组件上,最后由移送组件送出到预定位置。
5.本发明所使用的技术方案是:一种物流系统用运输放件机器人,包括移送组件、储存组件、取放组件、隔离板,所述移送组件包括转动设置在移送滑块上的移送连杆一,所述移送连杆一的一端转动安装有移送连杆二,所述移送连杆二的一端固定设置有移送固定板,所述移送固定板滑动设置在移送滑杆上,所述移送固定板上滑动设置有移送夹板滑杆,所述移送夹板滑杆的一端固定设置有移送夹板,所述移送夹板的一侧固定设置有底板,所述移送夹板滑杆上转动设置有滚轮,滚轮与滑动设置在移送推板滑杆上的移送推板配合,所述移送推板上固定设置有移送推板连杆,所述移送推板连杆与滑动设置在移送滑槽上的移送滑块活动连接;所述移送推板上转动设置有取放连杆一,所述取放连杆一的另一端转动设置在取放l形连杆上,所述取放l形连杆上活动设置有取放气缸二,所述取放l形连杆固
定设置在取放滑杆四的一端,所述取放滑杆四上滑动设置有取放架,所述取放架上固定连接有取放支架一,所述取放支架一滑动设置在取放滑杆一上,所述取放滑杆一上滑动设置有取放支架二,所述取放支架二上固定设置有取放头,所述取放头滑动设置在取放推杆上;所述取放滑杆四的一侧固定设置有取放滑杆三,所述取放滑杆三上固定设置有取放滑块,所述取放滑块上转动安装有取放连杆二,所述取放滑块滑动安装在取放滑杆二上,所述取放连杆二的一端转动安装有滑动设置在取放滑杆五上的取放滑块一。
6.进一步的,所述取放滑杆五上固定设置有取放气缸一,所述取放气缸一的一端固定设置在取放滑杆一上;所述取放滑杆二上固定安装有固定板,所述固定板上转动设置有取放螺杆,所述取放螺杆上的螺纹与取放滑杆五啮合进行位移。
7.进一步的,所述固定板上固定设置有储存仓外壳,所述储存仓外壳内设置有多个储存仓,所述储存仓的一侧滑动设置有储存仓推杆。
8.进一步的,所述移送滑杆固定安装在移送底板上,移送底板固定安装在取放滑杆四的一端,移送底板上还固定安装有移送推板滑杆和移送滑槽,移送滑块的一侧固定设置有复位弹簧,复位弹簧的另一侧固定设置在移送滑槽上。
9.进一步的,所述取放连杆二为多组对称设置,所述取放滑块为多组对称设置;所述取放滑杆二上固定设置有取放组件,所述取放组件滑动设置在取放滑杆上。
10.进一步的,所述取放架上设置有u形槽。
11.进一步的,所述移送夹板滑杆上设置有夹紧复位弹簧,夹紧复位弹簧一端固定设置在移送固定板上,夹紧复位弹簧另一端固定设置在移送夹板上。
12.进一步的,所述移送推板的一侧固定设置有斜面,斜面与滚轮配合。
13.本发明与现有技术相比的有益效果是:本发明通过设置移送组件,可将待储存或者待取出的包裹自动送入到包裹出口,或者和取放组件配合实现联动将包裹送入储存组件进行存储;本发明通过设置存储组件,存储组件上设置可移动取放组件,可以根据实际情况自动识别,取出需要的包裹,并与移送组件实现联动,提高存储以及取出效率;本发明通过设置卡紧夹板,实现避免包裹在取放过程中出现震动、摩擦、掉落的风险,进行平稳可靠的工作,最大程度保障消费者的利益。
附图说明
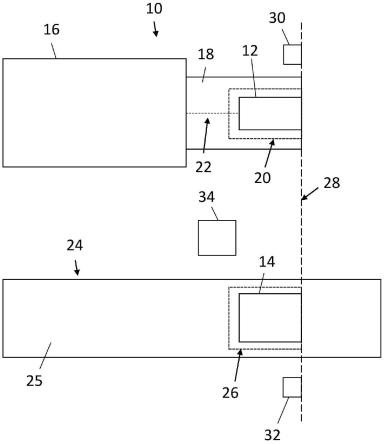
14.图1为本发明整体局部结构示意图。
15.图2为本发明移送组件和取放组件局部结构示意图。
16.图3为本发明图2中a处局部放大结构示意图。
17.图4为本发明图2中c处局部放大结构示意图。
18.图5为本发明图2中b处局部放大结构示意图。
19.图6为本发明储存组件局部结构示意图。
20.图7为本发明整体结构示意图(正视图)。
21.图8为本发明整体结构示意图(侧视图)。
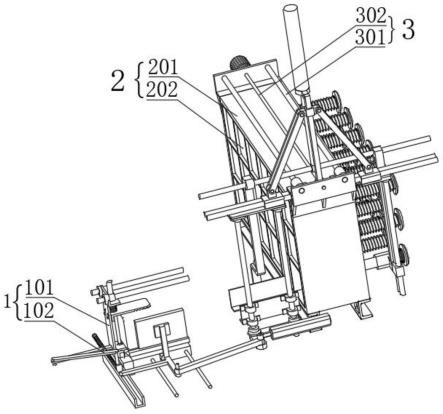
22.附图标记:1-移送组件;2-储存组件;3-取放组件;4-隔离板;101-移送固定板;102-移送连杆一;103-移送推板;104-移送连杆二;105-移送弹簧;106-移送滑槽;107-移送滑块;108-移送推板连杆;109-移送滑杆;110-移送夹板滑杆;111-移送夹板;112-移送推板
滑杆;201-储存仓外壳;202-储存仓;203-储存仓推杆;301-取放滑杆;302-取放螺杆;303-取放气缸一;304-取放滑杆一;305-取放滑杆二;306-取放推杆;307-取放头;308-取放滑杆三;309-取放支架一;310-取放连杆一;311-取放气缸二;312-取放架;313-取放滑杆四;314-取放l形连杆;316-取放滑块;317-取放连杆二;318-取放滑杆五;319-取放滑块一;320-固定板;321-取放支架二。
具体实施方式
23.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
24.实施例:如图1、图2、图3、图4、图5、图6、图7、图8、所示,一种物流系统用运输放件机器人,包括移送组件1、储存组件2、取放组件3、隔离板4、移送组件1包括转动设置在移送滑块107上的移送连杆一102,移送连杆一102的一端转动安装有移送连杆二104,移送连杆二104的一端固定设置有移送固定板101,移送固定板101滑动设置在移送滑杆109上,移送固定板101上滑动设置有移送夹板滑杆110,移送夹板滑杆110的一端固定设置有移送夹板111,移送夹板111的一侧固定设置有底板,移送夹板滑杆110上转动设置有滚轮,滚轮与滑动设置在移送推板滑杆112上的移送推板103配合,移送推板103上固定设置有移送推板连杆108,移送推板连杆108与滑动设置在移送滑槽106上的移送滑块107活动连接;移送推板103上转动设置有取放连杆一310,取放连杆一310的另一端转动设置在取放l形连杆314上,取放l形连杆314上活动设置有取放气缸二311,取放气缸二311活动设置在移动底板上,取放l形连杆314固定设置在取放滑杆四313的一端,取放滑杆四313上滑动设置有取放架312,取放架312上固定连接有取放支架一309,取放支架一309滑动设置在取放滑杆一304上,取放滑杆一304上滑动设置有取放支架二321,取放支架二321上固定设置有取放头307,取放头307滑动设置在取放推杆306上。
25.取放滑杆四313的一侧固定设置有取放滑杆三308,取放滑杆三308上固定设置有取放滑块316,取放滑块316上转动安装有取放连杆二317,取放滑块316滑动安装在取放滑杆二305上,取放连杆二317的一端转动安装有滑动设置在取放滑杆五318上的取放滑块一319。
26.取放滑杆五318上固定设置有取放气缸一303,取放气缸一303的一端固定设置在取放滑杆一304上;取放滑杆二305上固定安装有固定板320,固定板320上转动设置有取放螺杆302,取放螺杆302上的螺纹与取放滑杆五318啮合进行位移。固定板320上固定设置有储存仓外壳201,储存仓外壳201内设置有多个储存仓202,储存仓202的一侧滑动设置有储存仓推杆203。
27.移送滑杆109固定安装在移送底板上,移送底板固定安装在取放滑杆四313的一端,移送底板上还固定安装有移送推板滑杆112和移送滑槽106,移送滑块107的一侧固定设置有复位弹簧,复位弹簧的另一侧固定设置在移送滑槽106上。取放连杆二317为多组对称设置,取放滑块316为多组对称设置;取放滑杆二305上固定设置有取放组件3,取放组件3滑动设置在取放滑杆301上。取放架312上设置有u形槽。
28.移送夹板滑杆110上设置有夹紧复位弹簧,夹紧复位弹簧一端固定设置在移送固定板101上,夹紧复位弹簧另一端固定设置在移送夹板111上。移送推板103的一侧固定设置有斜面,斜面与滚轮配合。
29.本发明公开的一种物流系统用运输放件机器人,其工作原理为:使用时,启动取放螺杆302一端固定连接的位移控制电机,位移控制电机带动取放螺杆302进而带动取放组件3和移送组件1在取放滑杆301上位移,取放气缸一303控制取放架312在取放滑杆四313上位移,取放气缸一303还控制取放头307在取放推杆306上位移,当取放头307移动到需要取出包裹的位置时,取放气缸二311收缩进而带动取放架312、取放滑杆四313、取放滑块316向取放滑杆五318方向位移,取放滑块316带动取放滑块一319在取放滑杆五318上滑动,进而带动取放支架二321也向取放滑杆五318靠进,此时取放架312移动到预定位置。
30.取放头307顶动某一个储存仓推杆203将包裹放置在取放架312上,此时取放气缸二311伸长,进而带动取放架312、取放滑杆四313、取放滑块316以及取放支架二321远离取放滑杆五318,同时取放连杆一310推动移送推板103在移送推板滑杆112上远离移送夹板111,此时移送推板连杆108放开移送滑块107,移送弹簧105释放弹性势能伸长,使得移送滑块107带动移送连杆一102进而带动移送连杆二104将移送夹板111沿移送滑杆109推动,使得移送夹板111移动到预定位置。
31.此时移送夹板111和移送固定板101间的弹簧压缩,移送夹板111和其下方的夹板将包裹夹紧,当气缸再次收缩时,取放连杆一310拉动移送推板103使移送推板103向移送夹板111靠近,同时移送推板连杆108触碰移送滑块107,压缩移送弹簧105,进而移送连杆一102推动移送连杆二104将移送夹板111拉动至靠近移送滑槽106的预定位置,此时移送推板103上的挡板贴近移送夹板111上的包裹,移送推板103一侧设置的斜面与移送夹板滑杆110一侧设置的滚轮滑动配合,放松移送夹板111与移送固定板101之间的弹簧,将包裹放在取放滑块一319上,经移送推板103上的挡板推出,至此完成了包裹的取件过程。
32.当需要将包裹放入储存仓202内时反之同理。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。