自动rtg系统、控制装置及集装箱搬运路径设定方法
技术领域
1.本发明涉及一种自动rtg系统、控制装置及集装箱搬运路径设定方法。
背景技术:
2.在专利文献1中记载了自动进行集装箱堆放场中的集装箱的搬运作业的一部分的内容。
3.以往技术文献
4.专利文献
5.专利文献1:日本特开2004-123367号公报
技术实现要素:
6.发明要解决的技术课题
7.在自动运行中,要求可靠地避免搬运的集装箱与除了装卸对象的集装箱以外的物品发生干涉。
8.本发明的目的在于提供一种能够提高集装箱的搬运安全性的自动rtg系统、控制装置及集装箱搬运路径设定方法。
9.用于解决技术课题的手段
10.本发明的一种实施方式所涉及的自动rtg系统具有:rtg起重机,对排列在集装箱堆放场的多个集装箱组中的集装箱进行搬运;及控制装置,控制rtg起重机,控制装置具备路径设定部,该路径设定部使用表示装卸对象即装卸对象集装箱组的轮廓的第1对象排(bay)分布信息及表示与装卸对象集装箱组相邻的相邻集装箱组的轮廓的第1相邻排分布信息来设定集装箱的搬运路径。
11.路径设定部可以创建叠加了第1对象排分布信息和第1相邻排分布信息的叠加分布信息,并且设定使集装箱通过比叠加分布信息高规定距离的位置的最佳路径作为集装箱的搬运路径。
12.路径设定部可以使用第1对象排分布信息及分别位于装卸对象集装箱组的两侧的一对第1相邻排分布信息来设定集装箱的搬运路径。
13.rtg起重机还可以具备分布检测器,该分布检测器测量装卸对象集装箱组的轮廓及相邻集装箱组的轮廓,控制装置还具备分布检测部,该分布检测部根据分布检测器的测量结果来创建第1对象排分布信息及第1相邻排分布信息。
14.控制装置还可以具备分布存储部,该分布存储部存储由分布检测部创建的第1对象排分布信息及第1相邻排分布信息。
15.控制装置还可以具备分布核对部,该分布核对部对存储于分布存储部中的第1对象排分布信息及第1相邻排分布信息中的每一个和由与分布检测器不同的机构获取到的表示装卸对象集装箱组的轮廓的第2对象排分布信息及表示相邻集装箱组的轮廓的第2相邻排分布信息中的每一个进行核对。
16.在第1对象排分布信息与第2对象排分布信息不一致的情况下和/或在第1相邻排分布信息与第2相邻排分布信息不一致的情况下,路径设定部可以设定使集装箱通过规定的最大高度的安全路径作为集装箱的搬运路径。
17.在第1对象排分布信息与第2对象排分布信息一致并且第1相邻排分布信息与第2相邻排分布信息一致的情况下,路径设定部可以设定最佳路径作为集装箱的搬运路径。
18.控制装置可以设置于rtg起重机上。
19.本发明的一种实施方式所涉及的rtg起重机的控制装置为控制对排列在集装箱堆放场的多个集装箱组中的集装箱进行搬运的rtg起重机的控制装置,该rtg起重机的控制装置具备路径设定部,该路径设定部使用表示装卸对象即装卸对象集装箱组的轮廓的第1对象排分布信息及表示与装卸对象集装箱组相邻的相邻集装箱组的轮廓的第1相邻排分布信息来设定集装箱的搬运路径。
20.本发明的一种实施方式所涉及的集装箱搬运路径设定方法为设定排列在集装箱堆放场的多个集装箱组中的rtg起重机的集装箱搬运路径的集装箱搬运路径设定方法,该集装箱搬运路径设定方法具备如下工序:使用表示装卸对象的装卸对象集装箱组的轮廓的第1对象排分布信息及表示与装卸对象集装箱组相邻的相邻集装箱组的轮廓的第1相邻排分布信息来设定集装箱的搬运路径。
21.发明效果
22.根据本发明,能够提高集装箱的搬运安全性。
附图说明
23.图1是表示应用了实施方式所涉及的自动rtg系统及集装箱搬运路径设定方法的示例性的集装箱码头的平面图。
24.图2是表示沿着搬运台车的行驶方向排列的装卸对象集装箱组及相邻集装箱组的例子的立体图。
25.图3是表示示例性的rtg起重机的立体图。
26.图4是示意性地表示图3的堆垛分布传感器及集装箱组的侧视图。
27.图5是示意性地表示实施方式所涉及的自动rtg系统的结构的系统结构图。
28.图6中(a)是示意性地表示将集装箱从搬运台车搬运到集装箱存放侧的搬运路径的侧视图。图6中(b)是示意性地表示将集装箱从集装箱存放侧搬运到搬运台车的搬运路径的侧视图。
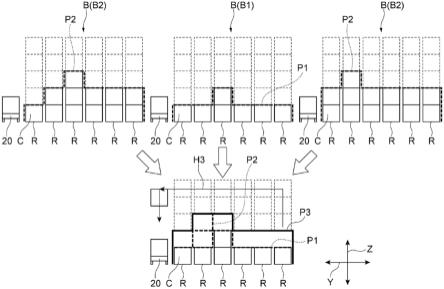
29.图7是用于说明基于实施方式所涉及的自动rtg系统的分布核对部的核对及基于路径设定部的路径设定的图。
30.图8是表示实施方式所涉及的集装箱搬运路径设定方法的各工序的例子的流程图。
具体实施方式
31.以下,参考附图,对本发明的实施方式进行说明。在附图的说明中,对相同或相应的要件标注相同的符号,并适当省略重复说明。并且,为了便于说明,在附图中,有时简化或夸张地描绘一部分,而尺寸比率等并不只限于记载于附图中的内容。
32.图1是表示示例性的集装箱码头1的平面图。如图1所示,集装箱码头1设置有:集装箱堆放场2,用于配置集装箱c;多个龙门起重机3,对靠岸的集装箱船进行集装箱c的移载;多个rtg起重机10,配置于集装箱堆放场2并且进行集装箱c的装卸;及远程操作室5,能够对多个rtg起重机10进行远程操作。
33.图2是表示集装箱堆放场2上的集装箱c及示例性的搬运台车20的立体图。搬运台车20例如为卡车、货车、拖车或agv(automated guide vehicl e:自动搬运台车)等。如图1及图2所示,在集装箱堆放场2铺设有用于存放多个集装箱的存放区域和供搬运台车20行驶的行驶路(卡车道)。rtg起重机10从停止在规定位置处的搬运台车20获取集装箱c并将集装箱c载置于集装箱堆放场2的规定位号处。并且,rtg起重机10获取配置于集装箱堆放场2上的集装箱c并将集装箱c移载到搬运台车20上,并由搬运台车20搬出集装箱c。
34.作为一例,集装箱c为iso规格的集装箱。集装箱c呈长尺寸的长方体形状。例如,集装箱c的长度方向上的长度为20英尺以上且40英尺以下。集装箱c的高度例如为8.5英尺以上且9.5英尺以下。集装箱c在集装箱堆放场2中堆放成一层或多层。配置有集装箱c的层数有时称为层(tier)。
35.集装箱堆放场2具备配置集装箱c的多个小区(lane)l,并且配置有多个rtg起重机10。关于rtg起重机10,例如,每个小区l均配置有rtg起重机10。配置于小区l的rtg起重机10的台数可以是一台,也可以是多台。后述的自动rtg系统100集中管理多个rtg起重机10。
36.集装箱c在集装箱堆放场2中堆放成一层或多层而形成有多个列(row)r。作为一例,列r的数量为六个。各列r排列成,构成该列r的集装箱c(即,载置于该列r的集装箱c)的长度方向与构成其他列r的集装箱c的长度方向平行。
37.若将排列配置在集装箱堆放场2中的集装箱c的长度方向设为x方向、将集装箱c的宽度方向设为y方向、将集装箱c的高度方向设为z方向,则集装箱堆放场2在xy平面上延伸。集装箱c例如在该xy平面上的某个位置处沿着z方向堆放。x方向与小区l中的rtg起重机10的行驶方向一致。y方向与小区l中的rtg起重机10的横移方向一致。
38.集装箱c构成沿着y方向排列并且沿着z方向堆放的多个集装箱组(即,排b)。在集装箱堆放场2设置有沿着x方向排列的多个排b。排b例如包括成为集装箱c的装卸对象的装卸对象排(即,装卸对象集装箱组b1)及分别位于装卸对象集装箱组b1的x方向上的两侧的相邻集装箱组b2。
39.在集装箱堆放场2中,集装箱c的堆放位置被假想地设定为三维空间。该集装箱c的假想的堆放位置被定义为位号(x,y,z)。即,集装箱堆放场2具有预先划定为能够载置集装箱c的区域的多个位号(x,y,z)。位号(x,y,z)中的“x”表示排号,“y”表示列号,“z”表示层号。
40.图3是表示配置于集装箱堆放场2的示例性的rtg起重机10的立体图。如图3所示,rtg起重机10为用于装卸集装箱c的集装箱装卸起重机,并且为轮胎式龙门起重机(rtg;rubber tyred gantry crane)。rtg起重机10例如在集装箱码头1中自动进行配置于集装箱堆放场2的集装箱c的装卸。
41.rtg起重机10例如具备一对支脚部11、连结一对支脚部11的上端彼此之间的起重机主梁12、能够在起重机主梁12上横移的起重机小车13、装卸集装箱c的吊具14及具有车轮的行走装置15。一对支脚部11及起重机主梁12呈门形。例如,rtg起重机10配置成,具备两组
门形的一对支脚部11及起重机主梁12的组并且两个组在x方向上排列。
42.起重机小车13例如通过横移马达的驱动而沿着y方向横移。在本实施方式中,y方向与起重机小车13的横移方向一致。作为一例,起重机小车13具有包括通过滚筒驱动马达的驱动而进行正反转的滚筒的卷绕驱动部16,并且经由包括钢丝绳的悬吊部件18悬吊有吊具14。悬吊部件18从起重机小车13的沿着x方向排列的两处位置延伸。吊具14在沿着x方向排列的两处位置悬吊在悬吊部件18。
43.吊具14为用于起吊集装箱c的吊具。吊具14例如呈沿着x方向延伸的矩形形状。吊具14能够从上方卡止集装箱c,通过卡止并起吊集装箱c来进行集装箱c的装卸。例如,吊具14的动作通过上述横移马达及滚筒驱动马达的驱动来控制。本实施方式所涉及的自动rtg系统100控制该横移马达及滚筒驱动马达的驱动。
44.如图3及图4所示,rtg起重机10还具备检测载置于排(bay)的集装箱组b的轮廓的分布检测器19。分布检测器19例如配置于起重机主梁12上。分布检测器19例如为能够沿y方向进行扫描的激光测距仪。例如,在rtg起重机10沿x方向行驶时,分布检测器19测量载置于各列(row)的最上层的集装箱c的上表面为止的距离,并将测量结果发送给分布检测部111。分布检测部111根据从分布检测器19接收的测量结果来创建集装箱c的分布信息。
45.在本发明中,“分布信息”表示载置的多个集装箱的暴露于上方的面(也可以包括暴露于侧方的面)的信息,其包括载置的集装箱的上表面的信息。分布检测器19随着rtg起重机10沿x方向行驶而对集装箱c的暴露于上方的面(例如,包括集装箱c的上表面及暴露于侧方的面)进行扫描,并测量各列的集装箱c的暴露于上方的面为止的距离。分布检测部111根据各集装箱c的暴露于上方的面为止的距离来判断堆放在各列的集装箱的层数,检测出上述的每个排b的分布信息。有时将其称为测量分布信息。如此,分布检测部111创建集装箱c的分布信息,从而获得集装箱堆放场2的小区l中的集装箱c的存放信息。
46.作为一例,rtg起重机10具备沿着起重机主梁12排列的三个分布检测器19,各分布检测器19检测两个列r的分布信息。然而,分布检测器19的数量及配置方式并不只限于上述例,可以适当变更。
47.图5是表示本实施方式所涉及的自动rtg系统100的结构及功能的框图。图6中(a)及(b)分别是用于说明集装箱c的搬运路径的设定的图。在本实施方式中,使用上述的集装箱的分布信息来设定集装箱的搬运路径h1、h2。
48.rtg起重机10具备包括上述分布检测部111的控制装置110。控制装置110例如可以具备处理器、存储器、存储设备(storage)及通信接口,可以构成为计算机(还被称为机上自动控制pc)。处理器为cpu(central processing unit:中央处理器)等运算器。存储器为rom(read only memory:只读存储器)或ram(random access memory:随机存储器)等存储部。存储设备为hd d(hard disk drive:硬盘驱动器)等存储部(存储介质)。通信接口为实现数据通信的通信设备。处理器控制存储器、存储设备及通信接口,从而实现后述的控制装置110的功能。在控制装置110中,例如,通过将存储于rom中的程序加载到ram中并由cpu执行加载到ram中的程序来实现各种功能。构成控制装置110的计算机的数量可以是一个,也可以是多个。
49.自动rtg系统100例如具备设置于上述远程操作室5的多个操作台6和管理多个rtg起重机10的自动运行的管理计算机7。管理计算机7又被称为rgc(rtg组管理计算机)。管理
计算机7例如具备与上述控制装置110相同的计算机要件。即,管理计算机7例如具备与上述相同的处理器、存储器、存储设备及通信接口。
50.通过由管理计算机7管理多个rtg起重机10,能够实现多个rtg起重机10的自动装卸。另外,在图5中,作为能够与远程操作室5进行通信的rtg起重机10仅图示了一个rtg起重机10。然而,实际上,多个rtg起重机10能够与远程操作室5进行通信。远程操作室5与多个rtg起重机10之间的通信例如通过无线通信来实现。
51.通常,rtg起重机10自动进行集装箱c的装卸。例如,rtg起重机10有时被分配到操作台6。如此,在rtg起重机10被分配到操作台6的情况下,能够从该操作台6手动进行该rtg起重机10的操作。作为手动进行rtg起重机10的操作的情况,例如可举出从安全性的观点出发将集装箱c移载到搬运台车20的情况。如此,在rtg起重机10被分配到操作台6的情况下,操作者能够从该操作台6操作被分配的rtg起重机10。
52.集装箱码头1上的所有装卸作业由tos(terminal operation system;码头营运系统)8管理。tos8能够与管理计算机7进行通信。例如,管理计算机7和tos8可以通过有线线路进行通信。然而,管理计算机7与tos8之间的通信线路也可以是无线线路,可以适当变更。tos8能够经由管理计算机7与rtg起重机10进行通信。然而,tos8和rtg起重机10也可以无线通信。tos8集中管理集装箱码头1中的基于多台rtg起重机10的集装箱c的装卸作业。tos8向管理计算机7或控制装置110输出集装箱c的装卸作业指示。tos8可以设置于远程操作室5,也可以设置于除了远程操作室5以外的其他位置。如此,可以适当改变tos8的位置。tos8基于发送给管理计算机7的装卸作业请求和从管理计算机7接收到的装卸作业完成报告来创建集装箱的分布信息。有时将该分布信息称为tos分布信息(第2分布信息)。tos8在发送了装卸作业请求时和接收到了装卸作业完成报告时更新tos分布信息,从而始终保持最新的存放信息。
53.管理计算机7根据从tos8接收到的装卸作业请求向各rtg起重机10的控制装置110发送自动运行开始指示。并且,若管理计算机7从自动运行期间的控制装置110接收到操作请求,则将rtg起重机10分配到操作台6。操作者从被管理计算机7分配的操作台6远程操作rtg起重机10。若基于操作者的远程操作完毕,则管理计算机7指示rtg起重机10的控制装置110重新开始自动运行。若rtg起重机10完成接受到请求的装卸作业,则管理计算机7向tos8报告装卸作业完成。
54.控制装置110具备如下功能性构成要件:上述分布检测部111、测量分布存储部112、tos分布获取部113、及分布核对部114。tos分布获取部113例如获取经由管理计算机7从tos8接收的tos分布信息。如上所述,分布检测部111根据分布检测器19的检测结果来创建测量分布信息。分布核对部114将测量分布信息与tos分布信息进行核对,从而判定它们是否一致。
55.例如,控制装置110还具备如下功能性构成要件:设定基于rtg起重机10的吊具14的集装箱c的移送路径的路径设定部115、及按照由路径设定部115设定的路径设定来控制吊具14的移动的移动控制部116。在搬运上述装卸对象集装箱组b1的集装箱c时,路径设定部115使用集装箱c的分布信息来设定搬运路径。图6中(a)所示的h1表示将搭载于搬运台车20上的集装箱c移载到存放区域时的搬运路径。图6中(b)所示的h2表示将存放区域的集装箱c移载到搬运台车20上时的搬运路径。移动控制部116控制横移马达和滚筒驱动马达,以
使集装箱c沿着由路径设定部115设定的路径移动。
56.如图6中(a)所示,在朝向远离搬运台车20的方向搬运集装箱c时,路径设定部115根据装卸对象集装箱组b1的集装箱c的存放状况来设定搬运路径h1。图6中(a)为将搬运台车20上的集装箱c搬运到存放区域的例子。路径设定部115设定通过比装卸对象集装箱组b1中的存放在各列r中的集装箱c的最高高度高规定距离的位置而移送的搬运路径h1(以下,有时也称为最佳路径)。
57.例如,如图2所示,假设存放在相邻集装箱组b2中的集装箱c出现了x方向上的偏移e。此时,若在路径h4中仅根据装卸对象集装箱组b1的测量分布信息来搬运集装箱c,则集装箱c会与相邻集装箱组b2的偏移e部分发生干涉,集装箱c可能会坠落到搬运台车20上。因此,如图6(a)所示,在将集装箱c从搬运台车20移载到存放区域时,路径设定部115设定最佳路径。在将集装箱c从存放区域移载到搬运台车20时,路径设定部115可以设定不管实际的装卸对象集装箱组b1的存放状况如何均超过装卸对象集装箱组b1的集装箱c的最大高度m的搬运路径h2。即,向搬运台车20侧搬运集装箱c时,路径设定部115设定比实际的装卸对象集装箱组b1的集装箱c更高的搬运路径h2。通过设为这种路径,能够避免上述的集装箱c坠落到搬运台车20上的可能性。有时将超过装卸对象集装箱组b1的集装箱c的最大高度m的搬运路径h2称为安全路径。
58.然而,若路径设定部115设定向搬运台车20侧搬运集装箱c时始终超过最大高度m的路径,则搬运集装箱c所需的时间会变得比通过最短路径时更长。
59.因此,如图7所示,本实施方式所涉及的路径设定部115不仅考虑装卸对象集装箱组b1的分布信息p1而且还考虑相邻集装箱组b2的分布信息p2来设定朝向搬运台车20侧的集装箱c的搬运路径h3。有时将装卸对象集装箱组b1的分布信息p1称为对象排分布信息。有时将对象排分布信息中的根据上述分布检测器19的测量来创建的分布信息称为第1对象排分布信息,将由与分布检测器19不同的机构创建的对象排分布信息称为第2对象排分布信息。第2对象排分布信息例如为对象排的tos分布信息,但是也可以是根据基于与分布检测器19不同的检测器的测量来创建的分布信息。并且,有时将相邻集装箱组b2的分布信息p2称为相邻排分布信息。有时将相邻排分布信息中的根据上述分布检测器19的测量来创建的分布信息称为第1相邻排分布信息,将由与分布检测器19不同的机构创建的对象排分布信息称为第2相邻排分布信息。第2相邻排分布信息例如为相邻排的tos分布信息,但是也可以是根据基于与分布检测器19不同的检测器的测量来创建的分布信息。例如,路径设定部115叠加对象分布信息p1和相邻排分布信息p2而创建叠加分布信息p3,并设定通过叠加分布信息p3的上方的搬运路径h3。搬运路径h3为根据对象排分布信息和相邻排分布信息来设定的最佳路径。
60.如上所述,路径设定部115设定搬运路径h3作为不与装卸对象集装箱组b1的集装箱c及相邻集装箱组b2的集装箱c发生干涉的最佳路径。另外,在图7中,示出了叠加了装卸对象集装箱组b1的分布信息p1和在x方向上的两侧相邻的相邻集装箱组b2(参考图2)的分布信息p2的例子。然而,路径设定部115也可以叠加装卸对象集装箱组b1的分布信息p1和在x方向上的单侧相邻的相邻集装箱组b2的分布信息p2来设定搬运路径h3。
61.在实施方式中,路径设定部115设定由y方向(横移方向)及z方向(铅垂方向)这两个方向构成的搬运路径。此时,移动控制部116以使横移马达和滚筒驱动马达依次进行动作
的方式进行控制,因此集装箱c在移动时基于振摆而与周围的其他集装箱等接触的可能性较小。然而,路径设定部115也可以设定使集装箱c斜向通过叠加分布信息p3的上方的搬运路径h3。此时,移动控制部116以使横移马达和滚筒驱动马达同时进行动作的方式进行控制,因此能够进一步提高集装箱c的搬运生产率。
62.移动控制部116控制横移马达和滚筒驱动马达以使吊具14沿着由路径设定部115设定的搬运路径h3移动。作为具体例,移动控制部116为了将吊具14所保持的集装箱c载置于搬运台车20上而使吊具14沿着搬运路径h3移动到搬运台车20。并且,移动控制部116例如为了获取载置于搬运台车20上的集装箱c而使吊具14沿着搬运路径h3移动。
63.接着,对本实施方式所涉及的集装箱搬运路径设定方法的例子进行说明。图8是表示本实施方式所涉及的集装箱搬运路径设定方法的示例性的各工序的流程图。作为一例,本实施方式所涉及的集装箱搬运路径设定方法使用自动rtg系统100来进行。
64.首先,rtg起重机10从tos8接收最新的装卸对象集装箱组b1的集装箱c的存放信息及相邻集装箱组b2的集装箱c的存放信息(步骤s1)。此时,例如,装卸对象集装箱组b1的集装箱c的存放信息及相邻集装箱组b2的集装箱c的存放信息从tos8经由管理计算机7发送到控制装置110。分布获取部71获取这些集装箱c的存放信息作为第2对象排分布信息p1及第2相邻排分布信息p2。
65.并且,分布核对部114从测量分布存储部112读出最新的测量分布(步骤s2)。具体而言,测量分布为基于由分布检测器19获得的检测结果的、装卸对象集装箱组b1的第1测量分布信息p1及第1相邻排分布信息p2。例如,步骤s2可以与步骤s1同时执行,也可以在步骤s1之前执行。步骤s2的执行时机可以适当变更。
66.接着,进行分布信息p1、p2的核对(步骤s3)。此时,由分布核对部114对从分布检测部111获取的第1分布信息p1、p2与从tos8获取的第2分布信息p1、p2进行核对。例如,在第1分布信息p1、p2与第2分布信息p1、p2一致的情况下(在步骤s3中为是),由路径设定部115设定最佳路径(步骤s4)。另一方面,在第2分布信息p1、p2与存储于测量分布存储部112中的第1分布信息p1、p2不一致的情况下(分布信息p1及分布信息p2中的至少任一个不一致的情况下)(在步骤s3中为否),由路径设定部115设定安全路径(步骤s5)。
67.在步骤s4中,例如,如图7所示,由路径设定部115创建叠加分布信息p3。并且,设定比叠加分布信息p3中的最高高度高规定距离并且距离搬运台车20最短的搬运路径h3。例如,在步骤s5中,如图6中(b)所示,由路径设定部115设定超过装卸对象集装箱组b1的集装箱c的最大高度m的搬运路径h2作为安全路径。此时,若出现tos8所保有的第2分布信息p1、p2与由分布检测器19检测到的第1分布信息p1、p2不一致的异常,则设定超过最大高度m的搬运路径h2,由此能够实现异常时的集装箱c的安全搬运。如上所述,在由路径设定部115设定了搬运路径h2、h3之后,移动控制部116控制吊具14沿着搬运路径h2、h3移动,从而搬运集装箱c,完成一系列的工序。
68.接着,对本实施方式所涉及的自动rtg系统100及集装箱搬运路径设定方法的作用效果进行详细说明。如图7所示,在本实施方式所涉及的自动rtg系统100及集装箱搬运路径设定方法中,路径设定部115使用装卸对象集装箱组b1的分布信息p1(第1对象排分布信息)及相邻集装箱组b2的分布信息p2(第1相邻排分布信息)来确定搬运路径h3。由此,路径设定部115不仅参考装卸对象集装箱组b1的分布信息p1而且还参考相邻集装箱组b2的分布信息
p2来设定搬运路径h3。因此,不仅参考装卸对象集装箱组b1而且还参考相邻集装箱组b2的分布信息p2来进行路径设定,由此能够避免集装箱c与装卸对象集装箱组b1及相邻集装箱组b2发生干涉。其结果,能够兼顾装卸效率和集装箱c的搬运安全性。
69.路径设定部115可以创建叠加了分布信息p1和分布信息p2的叠加分布信息p3,并且设定使集装箱c通过比叠加分布信息p3高规定距离的位置的的最佳路径作为集装箱c的搬运路径。
70.路径设定部115也可以使用保存在测量分布存储部112中的装卸对象集装箱组b1的测量分布信息p1及一对相邻集装箱组b2的测量分布信息p2来设定集装箱c的搬运路径h3。此时,路径设定部115使用装卸对象集装箱组b1的分布信息p1及分别位于装卸对象集装箱组b1两侧的一对相邻集装箱组b2的分布信息p2来设定搬运路径h3。因此,由于使用装卸对象集装箱组b1和一对相邻集装箱组b2的分布信息p1、p2来设定搬运路径h3,因此能够进一步提高集装箱c的搬运安全性。
71.rtg起重机10可以具备测量装卸对象集装箱组b1的轮廓及相邻集装箱组b2的轮廓的分布检测器19。控制装置110可以具备根据分布检测器19的测量结果来创建分布信息p1及分布信息p2的分布检测部111。
72.控制装置110可以具备存储由分布检测部111创建的分布信息p1及分布信息p2的测量分布存储部112。此时,由于装卸对象集装箱组b1的分布信息p1及相邻集装箱组b2的分布信息p2预先被存储,因此能够有效地进行集装箱c的搬运路径h3的设定。
73.控制装置110可以具备分布核对部114,该分布核对部114对存储于测量分布存储部112中的分布信息p1及分布信息p2中的每一个和由与分布检测器19不同的机构获取到的表示装卸对象集装箱组b1的轮廓的分布信息p1(第2对象排分布信息)及表示相邻集装箱组b2的轮廓的分布信息p2(第2相邻排分布信息)中的每一个进行核对。此时,由于对预先存储的装卸对象集装箱组b1及相邻集装箱组b2的分布信息p1、p2与检测到的装卸对象集装箱组b1及相邻集装箱组b2的分布信息p1、p2进行核对,因此能够进一步提高分布信息p1、p2的精确度。
74.在存储的装卸对象集装箱组b1的分布信息p1与检测到的装卸对象集装箱组b1的分布信息p1不一致的情况下(在第1对象排分布信息与第2对象排分布信息不一致的情况下)和/或在存储的相邻集装箱组b2的分布信息p2与检测到的相邻集装箱组b2的分布信息p2不一致的情况下(在第1相邻排分布信息与第2相邻排分布信息不一致的情况下),路径设定部115可以设定使集装箱c通过规定的最大高度的安全路径(例如搬运路径h2)作为集装箱c的搬运路径。此时,由于在检测到的分布信息p1、p2与存储的分布信息p1、p2不一致时设定更高的搬运路径h2,因此能够在产生了分布信息p1、p2不一致的异常时进行更加安全的路径设定。
75.在存储的装卸对象集装箱组b1的分布信息p1与检测到的装卸对象集装箱组b1的分布信息p1一致(第1对象排分布信息与第2对象排分布信息一致)且存储的相邻集装箱组b2的分布信息p2与检测到的相邻集装箱组b2的分布信息p2一致的情况下(在第1相邻排分布信息与第2相邻排分布信息一致的情况下),路径设定部115可以设定最佳路径作为集装箱c的搬运路径。
76.分布获取部71可以设置于管理多个rtg起重机10的管理计算机7上。此时,由于分
布获取部71设置在管理多个rtg起重机10的管理计算机7上,因此能够利用分布获取部71统一管理多个装卸对象集装箱组b1及相邻集装箱组b2的分布信息p1、p2。控制装置110可以设置于rtg起重机10上。此时,能够利用rtg起重机10进行分布信息p1、p2的检测。
77.以上,对本发明所涉及的自动rtg系统及集装箱搬运路径设定方法的实施方式进行了说明。然而,本发明并不只限于上述实施方式,在不改变各技术方案中所记载的宗旨的范围内,可以进行变形。即,在不改变上述宗旨的范围内,可以适当改变本发明所涉及的自动rtg系统的各部的结构及功能、以及集装箱搬运路径设定方法的各工序的内容及顺序。
78.例如,在上述实施方式中,对rtg起重机10的控制装置110具备测量分布存储部112的例子进行了说明。然而,也可以省略测量分布存储部112及分布获取部71中的至少任一个。并且,也可以代替测量分布存储部112及分布获取部71而使tos8具备分布存储部,从而由tos8存储并管理分布信息p1、p2。
79.在上述实施方式中,对如下例子进行了说明:分布检测部111检测分别位于x方向上的两侧的相邻集装箱组b2的分布信息p2,路径设定部115参考一对相邻集装箱组b2的分布信息p2来设定搬运路径h3。然而,也可以不参考x方向上的两侧的相邻集装箱组b2的分布信息p2。即,也可以由分布检测部111检测位于单侧的相邻集装箱组b2的分布信息p2,由路径设定部115参考位于该单侧的相邻集装箱组b2的分布信息p2来设定搬运路径h3。
80.在上述实施方式中,对如下例子进行了说明:分布核对部114对分布信息p1、p2进行核对,并在由分布检测部111检测到的分布信息p1、p2与存储于测量分布存储部112中的分布信息p1、p2一致的情况下,路径设定部115设定搬运路径h3。然而,还可以省略分布核对部114。例如,也可以由分布检测部111检测装卸对象集装箱组b1的分布信息p1及相邻集装箱组b2的分布信息p2,由路径设定部115根据检测到的分布信息p1、p2求出叠加分布信息p3并设定搬运路径h3。此时,由于也能够设定参考了装卸对象集装箱组b1及相邻集装箱组b2的集装箱c的存放信息的最佳的搬运路径h3,因此能够维持集装箱c的搬运安全性的同时能够设定生产率高的搬运路径h3。
81.符号说明
82.1-集装箱码头,2-集装箱堆放场,3-龙门起重机,5-远程操作室,6-操作台,7-管理计算机,8-tos,10-rtg起重机,11-支脚部,12-起重机主梁,13-起重机小车,14-吊具,15-行走装置,16-卷绕驱动部,18-悬吊部件,20-搬运台车,71-分布获取部,100-自动rtg系统,110-控制装置,111-分布检测部,112-测量分布存储部(分布存储部),113-tos分布获取部,114-分布核对部,115-路径设定部,116-移动控制部,b-排(集装箱组),b1-装卸对象集装箱组,b2-相邻集装箱组,c-集装箱,h1-搬运路径,h2-搬运路径(安全路径),h3-搬运路径(最佳路径),l-小区,p1、p2-分布信息,p3-叠加分布信息,r-列。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
