1.本发明涉及电梯控制技术领域,具体是一种非医用电梯应急处理用担架自动升高控制系统。
背景技术:
2.当前,民用住宅楼大都为高层建筑,其建筑内的电梯几乎都是非医用电梯,尤其是一些建设较早的小区,电梯不论是内部间距、还是电梯门的宽度都较窄;加上建设时间较早,入住率基本都比较高,有些小区甚至因为楼房建成的时间长,相应的该楼栋住户的平均年龄较大,在遇到突发病情或意外状况时,需要用到担架抬伤患者。
3.当在使用担架时,最先遇到的是电梯狭窄导致担架无法放置的问题;常用的做法就是人为的将担架一端竖起,然后将移动担架至电梯内部,在电梯下降的过程中,还需要长时间的扶着担架;特别是遇到高峰期,电梯经停多个楼层,极大地增加了担架竖起的时间,会使得医护人员更加疲惫;此外,担架竖起后,因为是人为扶着,为了保证担架不歪斜,通常是多个医护人员协同扶起担架。
4.针对上述问题,现有申请号为2013102028543,名称为能放置担架的电梯轿厢的专利,其公开了一种防止担架的方法,即在轿厢的侧壁上安装支撑架和把手,这种结构虽然能够防止担架,但是把手和支撑台是向电梯内部凸起的,儿童容易磕碰到这个支撑架或把手;存在一定的安全隐患。
5.申请号为2012105630925,名称为一种可容纳急救担架车的电梯;申请号为2019221727870,名称为既有住宅增设担架电梯的专利,均公开了一种在电梯侧壁上加装一个箱体来增加电梯内部空间的方法,该方法虽然可行,但是受困于现有电梯井的结构大小,电梯结构的限制,箱体的加装空间有限,有限的空间对于一些型号较大的担架来说,其有时并不能解决担架放置的问题(加装的箱体大了就可能会使得箱体与电梯轿厢或电梯导轨之间存在干涉,影响使用安全)。
6.申请号为2019206133664,名称为一种用于电梯内部的医用担架升高固定装置,其公开了一种升降的锁紧夹具和弹锁机构来对担架进行固定的装置,但是该装置的弹锁机构容易被手指塞进去,儿童容易被卡手指,存在安全隐患,且其设置的两个相向滑动的滑块,使得其夹具的夹紧间距是固定的,但是应急的担架有时并非都是医用担架,例如应急担架,其两个抬杆之间的间距是随着伤患者的体型、体重,有变化的,因此,其无法解决应急担架的升高问题;此外,该装置的担架是正对着电梯门的,因此考虑实际应用时,担架被抬得很高,担架的一端抵着电梯门,当担架上端滑落时,其底部会直接碰撞电梯轿厢门,容易导致电梯轿厢门损坏。
7.此外,上述常见的几种方案中,其控制的都是电机的升降,而该控制装置设置在电梯内,人员流量大,控制按键没有保护措施,非常容易被误触碰或者出于好奇的心理主动触碰,影响设备的使用。
技术实现要素:
8.本发明的目的在于提供一种非医用电梯应急处理用担架自动升高控制系统,以解决上述背景技术中提出的问题。
9.为实现上述目的,本发明提供如下技术方案:
10.一种非医用电梯应急处理用担架自动升高控制系统,包括梯体、按键控制模块、升降机构、底部挡板、夹紧机构、电动伸缩杆和角壁板,所述梯体的轿厢底板上设有底部挡板,底部挡板的底部连接有电动伸缩杆;所述角壁板安装在梯体的拐角处,梯体拐角相邻的两个角壁板上设有升降机构和夹紧机构;所述夹紧机构能够对担架的抬杆进行夹紧固定,夹紧机构安装在升降机构上;所述升降机构安装在角壁板的背侧,能够对夹紧机构进行升降;所述升降机构的顶端连接有第一电机;所述按键控制模块一键能够控制升降机构、夹紧机构以及底部挡板的运动;所述升降机构与角壁板之间设有能够遮挡机械机构的收卷板。
11.进一步的:所述升降机构包括滑块、导向杆、螺杆和支撑架,所述滑块与夹紧机构连接,角壁板上开设有开口槽用于供滑块滑动,开口槽的两侧设有滑槽,导向杆的竖直的设置在角壁板上,滑块能够沿着导向杆滑动,滑块上设有螺纹孔,螺杆与滑块螺纹连接,螺杆的底部设有轴承座,轴承座设置在支撑架上;螺杆的顶端与第一电机连接。
12.进一步的:所述滑块的上下两端均连接有收卷板,两个收卷板的末端均设有一个收卷器,收卷器固定在角壁板上;所述收卷板设置在滑槽内,收卷板能够沿着滑槽滑动。
13.进一步的:所述第一电机的底部设有电机安装板,电机安装板能够设置在梯体的顶端。
14.进一步的:所述夹紧机构包括连接板、放置槽、夹紧块、转动盘、转动杆、转动连接杆和驱动装置,所述连接板与转动连接杆固定连接,连接板固定在滑块上;所述转动连接杆上通过销轴转动连接有转动杆,转动杆的顶端连接有转动盘,转动盘能够旋转,转动盘的上端设有放置槽,放置槽的一侧设有夹紧块,夹紧块滑动设置在放置槽的一侧,且夹紧块的一端连接有驱动装置。
15.进一步的:所述转动连接杆和转动杆之间设有弹簧。
16.进一步的:所述电动伸缩杆的顶端通过连接件与底部挡板连接,底部挡板的一侧转动安装在梯体的轿厢底板上;电动伸缩杆设置在固定架上;固定架固定在梯体的底部。
17.进一步的:所述按键控制模块包括控制主板、刷卡装置和控制按键,所述控制主板与远程控制系统连接;所述控制主板与刷卡装置连接,控制按键与控制主板电连接;控制按键能够控制第一电机、第二电机和电动伸缩杆的运动;所述控制主板还连接有紧急按钮,紧急按钮能够在刷卡装置或者控制按键故障时直接使用。
18.再进一步的:两个所述的滑块上端安装有滑轨,滑轨上安装有锁紧机构,锁紧机构在滑轨上的位置能够调节。
19.再进一步的:所述控制主板与数据处理模块连接,数据处理模块设置了训练模型,数据处理模块与电梯内的监控摄像头连接,监控视频的数据能够直接传输到数据处理模块,数据处理模块与后端的远程控制系统连接。
20.与现有技术相比,本发明的有益效果是:电梯内部人员站立高度区域的侧壁整洁,不会因触碰到凸起而受伤;设置的收卷板能够消除儿童手指触碰裸露机械部件受伤情况的发生;底部挡板能够使得增加一道安全保险;设置的按键控制模块,能够控制担架的升高和
下降;同时设置刷卡的方式开启控制按键,能够丰富担架升高的控制途径,提高了设备能够正常使用的可靠性。
附图说明
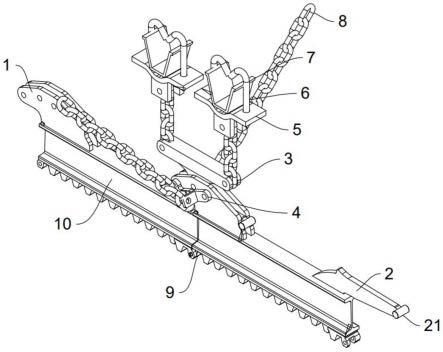
21.图1为一种非医用电梯应急处理用担架自动升高控制系统的结构示意图。
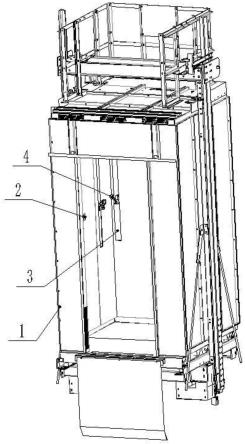
22.图2为本发明担架自动升高控制系统中轿厢的侧视立体结构示意图。
23.图3为图1的侧视结构示意图。
24.图4为一种非医用电梯应急处理用担架自动升高控制系统中升降机构的结构示意图。
25.图5为图4中a的放大结构示意图。
26.图6为一种非医用电梯应急处理用担架自动升高控制系统中夹紧机构的结构示意图。
27.图7为图6中b的放大结构示意图。
28.图8为图4的侧视结构示意图。
29.图9为图8中c的放大结构示意图。
30.图10为一种非医用电梯应急处理用担架自动升高控制系统中底部挡板的结构示意图。
31.图11为本发明夹紧机构的另一种安装结构俯视示意图。
32.图12为担架被竖立的结构示意图。
33.图13为本发明非医用电梯应急处理用担架自动升高控制系统的控制系统简图。
34.图14为本发明非医用电梯应急处理用担架自动升高控制系统另一种控制系统框图。
35.图中:1、梯体;2、按键控制模块;3、收卷板;4、放置槽;5、底部挡板;6、滑块;7、第一电机;8、电动伸缩杆;9、角壁板;10、电机安装板;11、导向杆;12、螺杆;13、支撑架;14、轴承座;15、收卷器;16、滑槽;17、连接板;18、转动连接杆;19、转动杆;20、转动盘;21、第二电机;22、夹紧块;23、弹簧;24、滑轨;25、固定架;26、连接件。
具体实施方式
36.下面结合具体实施方式对本专利的技术方案作进一步详细地说明。
37.请参阅图1-3,一种非医用电梯应急处理用担架自动升高控制系统,包括梯体1、按键控制模块2、升降机构、底部挡板5、夹紧机构、电动伸缩杆8和角壁板9,所述梯体1的轿厢底板上设有底部挡板5,底部挡板5的底部连接有电动伸缩杆8;所述角壁板9安装在梯体1的拐角处,梯体1拐角相邻的两个角壁板9上均设有升降机构和夹紧机构;所述夹紧机构能够对担架的抬杆进行夹紧固定,夹紧机构安装在升降机构上;所述升降机构能够安装在角壁板9的背侧,能够对夹紧机构进行升降,所述升降机构的顶端连接有第一电机7。
38.如图4、5所示,所述升降机构包括滑块6、导向杆11、螺杆12和支撑架13,所述滑块6与夹紧机构连接,角壁板9上开设有开口槽用于供滑块6滑动,开口槽的两侧设有滑槽16,导向杆11的竖直的设置在角壁板9上,滑块6能够沿着导向杆11滑动,滑块6上设有螺纹孔,螺杆12与滑块6螺纹连接,螺杆12的底部设有轴承座14,轴承座14设置在支撑架13上;螺杆12
的顶端与第一电机7连接;所述滑块6的上下两端均连接有收卷板3,两个收卷板3的末端均设有一个收卷器15,收卷器15固定在角壁板9上;所述收卷板3设置在滑槽16内,收卷板3能够沿着滑槽16滑动;在使用过程中,当滑块6上下滑动时,其会带着收卷器15内的收卷板3拉伸或收缩,从而使得角壁板9的开口上始终覆盖着收卷板3,从而使得升降机构被隐藏在角壁板9的后侧,使得儿童的手指不会被伤害;且角壁板9的开口边可以做磨边处理,去除毛刺。
39.所述第一电机7的底部设有电机安装板10,电机安装板10能够设置在梯体1的顶端。
40.如图6、7所示,所述夹紧机构包括连接板17、放置槽4、夹紧块22、转动盘20、转动杆19、转动连接杆18和驱动装置,所述连接板17与转动连接杆18固定连接,连接板17固定在滑块6上,转动连接杆18和滑块6可以设置为通孔,便于后期走线;所述转动连接杆18上通过销轴转动连接有转动杆19,转动杆19的顶端连接有转动盘20,转动盘20能够旋转,转动盘20的上端设有放置槽4,放置槽4的一侧设有夹紧块22,夹紧块22滑动设置在放置槽的一侧,且夹紧块22的一端连接有驱动装置,驱动装置能够推动夹紧块22伸长或者收缩,从而使得放置槽4内的抬杆能够被夹紧;在本实施例中,所述驱动装置为第二电机21;此外,驱动装置也可以手动转动的转盘,通过手动转动的方式来调节夹紧块22的伸缩。
41.如图8、9所示,所述转动连接杆18和转动杆19之间设有弹簧23。
42.在使用过程中,当需要固定担架的抬杆时,先将抬杆放入到放置槽4内,然后启动第二电机21,第二电机21使得夹紧块22向着抬杆运动,从而使得抬杆被夹紧,为了保证夹紧的效果,夹紧块22的内壁可以是弧面结构,且弧面结构上还可以设置凸起保证摩擦;当启动第一电机7使得滑块6升高时,转动杆19会转动,从而自适应调节放置槽4的角度。
43.如图10所示,所述电动伸缩杆8的顶端通过连接件26与底部挡板5连接,当电动伸缩杆8伸长时带动底部挡板5竖起,当电动伸缩杆8收缩时,带动底部挡板5下降;所述底部挡板5的一侧转动安装在梯体1的轿厢底板上;电动伸缩杆8设置在固定架25上;固定架25固定在梯体1的底部。
44.如图13所示,所述按键控制模块2包括控制主板、刷卡装置和控制按键,所述控制主板可以是电梯用mcu主板,其通过rs232或rs485通讯接口与远程控制系统连接;所述控制主板还与刷卡装置连接,控制按键与控制主板电连接,其连接方式与电梯按键原理类似;控制按键能够控制第一电机7、第二电机21和电动伸缩杆8的运动;所述控制主板还连接有紧急按钮,紧急按钮可以在刷卡装置或者控制按键故障时直接按。
45.当使用时,医护人员可以通过前期统一配发的钥匙卡通过刷卡的方式将按键控制模块2解锁,然后按下控制按键上的相应按钮,先控制第一电机下降(为了防止锁紧机构磕碰儿童,锁紧机构的默认位置为角壁板9的顶端),然后将抬杆防止到锁紧机构上,第二电机启动使得锁紧机构将担架抬杆固定;然后再启动第一电机使得滑块上升,从而使得整个锁紧机构连带着担架一起上升;如图12所示,当担架进入到电梯内部时,启动电动伸缩杆,使得底部挡板升起并挡在担架的底部,能够防止在担架顶端滑脱时担架撞向电梯门;为了提高使用效率,可以将多个电机控制的时序进行编码程序化,使得在使用时,医护人员只需一键触碰,即可完成全部担架抬起或者下降的控制操作;
46.如图14所示,为了提高电机控制时序的精度与可靠性,所述控制主板还与数据处
理模块连接,数据处理模块设置了训练模型,数据处理模块与电梯内的监控摄像头连接,使得监控视频的数据能够直接传输到数据处理模块,数据处理模块还与后端的远程控制系统连接;从而使得本发明可以通过电梯内部的摄像头,进行实时视频内容识别,然后依据识别的内容自动控制升降机构和锁紧机构的开启或关闭,从而实现控制电梯。
47.作为本发明的另一个实施例
48.一种非医用电梯应急处理用担架自动升高控制系统,包括梯体1、按键控制模块2、升降机构、底部挡板5、夹紧机构、电动伸缩杆8和角壁板9,所述梯体1的轿厢底板上设有底部挡板5,底部挡板5的底部连接有电动伸缩杆8,电动伸缩杆8设置在梯体1的底部框架上;所述角壁板9安装在梯体1的拐角处,梯体1拐角相邻的两个角壁板9上均设有升降机构和夹紧机构;所述夹紧机构能够对担架的抬杆进行夹紧固定,夹紧机构安装在升降机构上;所述升降机构能够安装在角壁板9的背侧,能够对夹紧机构进行升降,所述升降机构的顶端连接有第一电机7。
49.如图11所示,两个所述的滑块6上端安装有滑轨24,滑轨24上安装有锁紧机构,从而使得两个锁紧机构之间的间距能够进行灵活调节;使其能够适应不同宽度的担架,尤其是应急担架。
50.上面对本专利的较佳实施方式作了详细说明,但是本专利并不限于上述实施方式,在本领域的普通技术人员所具备的知识范围内,还可以在不脱离本专利宗旨的前提下作出各种变化。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。