1.本发明涉及转向装置的端部位置的检测装置、检测方法以及程序。
背景技术:
2.以往,在电动动力转向装置中,使用转向角信息来实现高级驾驶辅助系统(adas:advanced driver-assistance systems)的功能。此时,使用以直行状态下的转向角为基准点(中点)的转向角信息。如果从齿条的中心位置到基准点的偏移量已知,则能够通过确定齿条的中心位置来求出基准点。齿条的中心位置能够根据齿条的左右的端部位置计算出,但在该情况下,齿条的端部位置的检测精度对基准点的计算精度有很大影响。
3.例如,在专利文献1中,基于转向角的相对转向角的最大值和最小值,求出从一个齿条端部到另一个齿条端部的全转向角范围。
4.现有技术文献
5.专利文献
6.专利文献1:日本专利第5401875号公报
技术实现要素:
7.发明欲解决的技术问题
8.在专利文献1所示的方法中,由于机构部的扭转、松动,检测结果可能产生误差。另外,在专利文献1所示的方法中,在所搭载的齿条为非标准件的情况下,无法适当地检测齿条的状态。
9.鉴于上述课题,本发明的目的在于提供一种以更高的精度检测转向装置中的左右的端部位置的方法。
10.用于解决问题的技术手段
11.为了解决上述问题本发明具有以下结构。即,一种检测装置,
12.是对转向装置所具备的机构部的左右的转向方向各自的端部位置进行检测的检测装置,并且具有:
13.转向角检测单元,所述转向角检测单元检测所述机构部中的转向角;
14.致动器,所述致动器驱动所述机构部;
15.转矩检测单元,所述转矩检测单元检测对所述机构部的转向转矩;以及
16.极限位置检测单元,所述极限位置检测单元检测所述机构部中的左右的转向方向各自的极限位置,
17.所述极限位置检测单元
18.当通过由所述致动器产生的驱动力以及由所述转矩检测单元检测出的转向转矩中的至少一者而负载的所述机构部的转矩值超过第一阈值时,开始检测所述转矩值的方向上的转向角的极限位置,
19.在所述机构部的转矩值处于所述第一阈值与比所述第一阈值大的第二阈值之间
的期间,将由所述转向角检测单元检测出的转向角的峰值作为极限位置进行存储,从而继续检测所述极限位置,
20.在所述机构部的转矩值超过所述第二阈值时,将所存储的极限位置作为所述转矩值所表示的转向方向上的端部位置,结束所述极限位置的检测。
21.另外,本发明的另一方式具有以下的结构。即一种检测装置,是对转向装置所具备的机构部的左右的转向方向各自的端部位置进行检测的检测装置,并且具有:
22.转向角检测单元,所述转向角检测单元检测所述机构部中的转向角;
23.致动器,所述致动器驱动所述机构部;
24.转矩检测单元,所述转矩检测单元检测对所述机构部的转向转矩;以及
25.极限位置检测单元,所述极限位置检测单元检测所述机构部中的左右的转向方向各自的极限位置,
26.所述极限位置检测单元
27.当通过由所述致动器产生的驱动力以及由所述转矩检测单元检测出的转向转矩中的至少一者而负载的所述机构部的转矩值超过第一阈值时,开始检测所述转矩值的方向上的转向角的极限位置,
28.在所述机构部的转矩值处于所述第一阈值与比所述第一阈值小的第二阈值之间的期间,将由所述转向角检测单元检测出的转向角作为极限位置进行存储,从而继续检测进行所述极限位置,
29.在所述机构部的转矩值小于所述第二阈值时,将所存储的极限位置作为所述转矩值所表示的转向方向上的端部位置,结束检测所述极限位置。
30.另外,本发明的另一方式具有以下的结构。即一种检测方法,是对转向装置所具备的机构部的左右的转向方向各自的端部位置进行检测的检测方法,并且
31.在通过由驱动所述机构部的致动器产生的驱动力以及对所述机构部的转向转矩中的至少一者而负载的所述机构部的转矩值超过第一阈值时,开始检测所述转矩值的方向上的转向角的极限位置,
32.在所述机构部的转矩值处于所述第一阈值与比所述第一阈值大的第二阈值之间的期间,通过将所述机构部中的转向角的峰值作为极限位置进行存储,从而继续检测所述极限位置,
33.在所述机构部的转矩值超过所述第二阈值时,将所存储的极限位置作为所述转矩值所表示的转向方向上的端部位置,结束检测所述极限位置。
34.另外,本发明的另一方式具有以下的结构。即一种程序,是用于使计算机执行对转向装置所具备的机构部的左右的转向方向各自的端部位置进行检测的检测方法的程序,
35.所述检测方法
36.在通过由驱动所述机构部的致动器产生的驱动力以及对所述机构部的转向转矩中的至少一者而负载的所述机构部的转矩值超过第一阈值时,开始检测所述转矩值的方向上的转向角的极限位置,
37.在所述机构部的转矩值处于所述第一阈值与比所述第一阈值大的第二阈值之间的期间,通过将所述机构部中的转向角的峰值作为极限位置进行存储,从而继续检测所述极限位置,
38.在所述机构部的转矩值超过所述第二阈值时,将所存储的极限位置作为所述转矩值所表示的转向方向上的端部位置,结束检测所述极限位置。
39.发明效果
40.根据本发明,能够以更高的精度检测转向装置中的左右的端部位置。
附图说明
41.图1是表示本发明的一实施方式所涉及的电动动力转向装置的概要结构的例子的结构图。
42.图2是表示本发明的一个实施方式所涉及的功能结构的例子的图。
43.图3是用于说明确定本发明的一个实施方式所涉及的齿条端部位置时使用的阈值的图。
44.图4是本发明的一个实施方式所涉及的整个处理的流程图。
45.图5是本发明的一实施方式所涉及的齿条端部位置学习处理的流程图。
46.图6是本发明的第一实施方式所涉及的极限值学习处理的流程图。
47.图7是本发明的第二实施方式所涉及的极限值学习处理的流程图。
48.符号说明
49.1 方向盘
50.2 转向轴
51.3 减速齿轮
52.4a、4b 万向接头
53.5 小齿轮齿条机构
54.6a、6b 拉杆
55.7a、7b 轮毂单元
56.8l、8r 转向车轮
57.9 扭杆
58.10 转矩传感器
59.11 点火(ign)钥匙
60.12 车速传感器
61.13 电池
62.14 转向角传感器
63.20 转向辅助马达
64.30 eps(electric power steering)-ecu(electronic control unit)
65.201 齿条端部位置学习部
66.202 中点计算部
67.203 齿条行程计算部
68.204 阈值保存部
69.205 规格偏离判定部
具体实施方式
70.以下,参照附图等,对用于实施本发明的方式进行说明。此外,以下说明的实施方式是用于说明本发明的一个实施方式,并不意图限定解释本发明,另外,各实施方式中说明的全部结构不一定是为了解决本发明的课题而必须的结构。另外,在各附图中,对于相同的构成要素,通过标注相同的附图标记来表示对应关系。
71.《第一实施方式》
72.以下,对本发明的第一实施方式进行说明。此外,以下所示的电动动力转向装置的结构是一个例子,本发明能够应用于包括转向装置在内的转向系统全体。
73.[结构概要]
[0074]
在图1中示出本实施方式所涉及的电动动力转向装置的结构例。方向盘1是用于供驾驶员进行转向操作的转向轮。方向盘1的转向轴2经由构成减速机构的减速齿轮(蜗轮)3、万向接头4a、4b、小齿轮齿条机构5、拉杆6a、6b,进而经由轮毂单元7a、7b与转向车轮8l、8r连结。
[0075]
转向轴2被构成为经由扭杆9将方向盘1侧的输入轴与小齿轮齿条机构5侧的输出轴连结。小齿轮齿条机构5具有:小齿轮5a,其与从万向接头4b传递转向力的小齿轮轴(未图示)连结;齿条5b,其与小齿轮5a啮合。传递到小齿轮5a的旋转运动被齿条5b转换为车宽方向的直行运动。在以下的说明中,将与齿条5b的左右端部对应的转向极限称为齿条端部,将其位置作为齿条端部位置进行说明。
[0076]
在转向轴2设置有转矩传感器10,该转矩传感器10检测对扭杆9施加的转向转矩t
dct
。另外,在转向轴2设置有转向角传感器14,该转向角传感器14对表示转向轴2的方向盘1侧(输入轴侧)的绕轴的旋转角的转向角θh进行检测。另外,在转向轴2设置有输出轴角传感器15,该输出轴角传感器15检测表示转向轴2的小齿轮齿条机构5侧(输出轴侧)的绕轴的旋转角的输出轴角θc。即,转向角传感器14检测输入轴侧的相对于扭杆9的旋转角作为转向角θh,输出轴角传感器15检测输出轴侧的相对于扭杆9的旋转角作为输出轴角θc。转矩传感器10基于因转向角θh与输出轴角θc之差而产生的扭杆9的扭转,来检测转向转矩t
dct
。进而,经由转矩传感器10或者从转向角传感器14、输出轴角传感器15直接对eps-ecu30通知转向角θh、输出轴角θc的信息。
[0077]
另外,转向角传感器14和输出轴角传感器15也可以是一体构成的传感器。另外,在图1中,为了容易说明,分开示出转向轴2和转矩传感器10,但也可以是转向轴2和转矩传感器10成为一体的结构。转矩传感器10的结构没有特别限定,例如,可以使用根据扭杆9的扭转来检测转矩的套筒类型、环形类型等。另外,在上述的结构中,基于因转向角θh与输出轴角θc之差而产生的扭杆9的扭转而检测转向转矩t
dct
,但并不限定于此。例如,也可以使用扭杆9的方向盘1侧的角度信号与小齿轮齿条机构5侧的角度信号之差,检测转向转矩t
dct
。在以下的说明中,也将转向轴2的方向盘1侧称为上游侧,将小齿轮齿条机构5侧称为下游侧。
[0078]
在由转矩传感器10检测出的转向转矩t
dct
中,除了基于驾驶员对方向盘1的操作而产生的驾驶员转矩之外,还包括由于来自下游侧的输入(干扰等)而产生的转矩。对基于转向转矩t
dct
的辅助指令值进行校正,以抑制由于下游侧的输入而产生振动。在此的抑制方法没有特别限定,可以使用任意的方法。
[0079]
辅助对方向盘1的转向力的转向辅助马达20经由减速齿轮3而与转向轴2连结。从
蓄电池13向作为控制电动动力转向(eps:electric power steering)装置的控制器的eps-ecu(electronic control unit:电子控制单元)30供给电力,并且经由点火(ign)钥匙11输入点火钥匙信号。另外,对转向轴2施加转向辅助力的机构不限于马达,也可以利用各种种类的致动器。
[0080]
eps-ecu30基于由转矩传感器10检测出的转向转矩t
dct
、以及由车速传感器12检测出的车速vh进行作为辅助指令值的电流指令值的运算。而且,eps-ecu30通过与基于转向转矩t
dct
的电流指令值和基于驾驶辅助功能的电流指令值对应的输出电压v
ref
来控制向转向辅助马达20供给的电力。转向辅助马达20基于来自eps-ecu30的输出电压v
ref
使减速齿轮3动作,进行对方向盘1的辅助控制。另外,根据输出电压v
ref
而对转向辅助马达20施加的马达电流im由马达电流检测部(未图示)检测,并通知给eps-ecu30。另外,转向辅助马达20的马达角θm利用由编码器、旋转变压器等构成的马达角传感器(未图示)检测,并通知给eps-ecu30。
[0081]
本实施方式所涉及的电动动力转向装置例如能够搭载于能够通过自动驾驶(ad:autonomous driving)、adas进行行驶控制的车辆(未图示)。作为驾驶辅助功能,可列举出基于adas功能的车道维持功能、车道变更功能等,但其种类并无特别限定。也可以根据电动动力转向装置所具备的方向盘1的保持状态,来切换由驾驶辅助功能提供的内容。eps-ecu30也进行与由车辆提供的驾驶辅助功能对应的电流指令值的运算。
[0082]
eps-ecu30例如可以具备计算机,该计算机包括处理器和存储装置等周边部件。处理器例如可以是cpu(central processing unit:中央处理单元)或mpu(micro-processing unit:微处理单元)。存储装置可以具备半导体存储装置、磁存储装置以及光学存储装置中的任一个。存储装置可以包括寄存器、高速缓冲存储器、用作主存储装置的rom(read only memory:只读存储器)以及ram(random access memory:随机存取存储器)等存储器。以下说明的eps-ecu30的功能例如通过eps-ecu30的处理器执行存储于存储装置中的计算机程序来实现。
[0083]
需要说明的是,eps-ecu30也可以由用于执行以下说明的各信息处理的专用的硬件来形成。例如,eps-ecu30也可以具备在通用的半导体集成电路中设定的功能性的逻辑电路。例如,eps-ecu30也可以具有现场可编程门阵列(fpga:field-programmable gate array)等可编程逻辑器件(pld:programmable logic device)等。
[0084]
在本实施方式中,将方向盘1、转向轴2、减速齿轮3、万向接头4a、4b、小齿轮齿条机构5以及扭杆9统称为机构部进行说明,但也可以将其他部位包含于机构部来进行处理。
[0085]
[功能结构]
[0086]
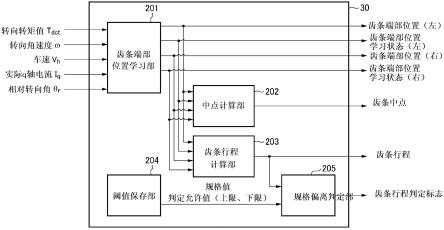
图2是表示作为本实施方式所涉及的齿条端部位置的检测装置发挥功能的eps-ecu30中的功能结构的例子的框图。在图2中,箭头表示数据的流向的例子,但并不限定于这里所示的流向,在部位之间协作的情况下,也可以进一步进行其他数据的发送接收。另外,在图2中,仅表示本实施方式所涉及的功能,但eps-ecu30也可以还具备用于实现其他功能的结构。例如,还可以具备用于计算辅助指令值的部位、用于adas功能等驾驶辅助功能的部位。
[0087]
eps-ecu30构成为包括齿条端部位置学习部201、中点计算部202、齿条行程计算部203、阈值保存部204以及规格偏离判定部205。齿条端部位置学习部201获取用于确定齿条
端部位置的各种信息,进行学习左右的齿条端部位置的处理。向齿条端部位置学习部201输入由转矩传感器10检测出的转向转矩t
dct
、转向角速度ω、由车速传感器12检测出的车速vh、实际q轴电流iq、相对转向角θr。转向角速度ω基于由转向角传感器14检测出的转向角θh通过转向角速度计算部(未图示)算出。实际q轴电流iq通过由马达电流检测部(未图示)检测出的马达电流im而导出,在此,相当于转矩轴电流(d-q轴坐标系中的q轴)。另外,在由转向辅助马达20规定的d-q轴坐标系中,d轴表示转向辅助马达20所具备的转子(未图示)的磁通的方向。另外,q轴表示与d轴正交的方向。根据转向辅助马达20的结构,实际q轴电流iq的导出方法可以不同。基于由马达角传感器(未图示)检测出的马达角θm,相对转向角θr通过相对转向角导出部(未图示)将锯齿波状变化的马达角θm变换为连续且线性地变化的信号并导出。并且,齿条端部位置学习部201输出通过学习而得到的左右的齿条端部位置以及与齿条端部位置的学习状态相关的信息。作为此处的与学习状态相关的信息,例如设定已学习、学习中、未学习等的值,详细情况与流程图一起在后面叙述。
[0088]
中点计算部202使用由齿条端部位置学习部201得到的各信息,计算齿条5b的中点。齿条行程计算部203使用由齿条端部位置学习部201得到的各信息,计算齿条5b的行程(齿条行程)。阈值保存部204保存在规格偏离判定部205中使用的各种阈值,并根据请求提供阈值的信息。具体而言,阈值包括齿条行程的标准值、判定允许值(上限、下限)。各种阈值根据电动助力转向装置的结构而被预先规定。
[0089]
规格偏离判定部205使用由阈值保存部204保存的各种阈值,判定由齿条行程计算部203计算出的齿条行程是否处于规格的范围。规格偏离判定部205输出表示判定结果的值。
[0090]
[学习处理中的阈值]
[0091]
图3是用于说明在本实施方式所涉及的学习处理中使用的阈值的图。在此,使用作为使方向盘1转向的结果而检测出的转矩与转向角的值的关系进行说明。在图3中,横轴表示转向角[deg],纵轴表示转矩[nm]。另外,图3的实线模拟地表示转向角与转矩的关系的例子,并不意图限定于该实线所示的对应关系。在本实施方式中,转向角对应于转向角θh,转矩对应于转向转矩t
dct
。在表示转向角的横轴中,以0为基准,右方向对应于方向盘1的顺时针的旋转,左方向对应于方向盘1的逆时针的旋转。另外,在表示转矩的纵轴上,以0为基准,上方向表示方向盘1的顺时针方向的转矩值,下方向表示方向盘1的逆时针方向的转矩值。对方向盘1的各旋转方向设定上限阈值和下限阈值。具体而言,设定右方向的上限的阈值th
ur
、右方向的下限的阈值th
lr
、左方向的上限的阈值th
ul
、左方向的下限的阈值th
ll
。
[0092]
在本实施方式中,施加于电动动力转向装置的驱动部的绕轴的转矩是致动器(在本例中,为转向辅助马达20)的驱动力和驾驶员对方向盘1的转向转矩的总和。图3的纵轴可以是由致动器产生的驱动力或由致动器产生的驱动力和转向转矩的总和。
[0093]
在本实施方式中,在转矩值超过下限阈值th
ll
、th
lr
时,开始与该方向对应的学习。在学习过程中,适时地存储相对于此时的转向角的峰值。通过导出与作为峰值而得到的转向角对应的齿条端部位置,从而能够确定齿条5b的结构(齿条的中点、齿条行程等)。
[0094]
在本实施方式中,在转矩的值超过左右各自的上限的阈值th
ul
、th
ur
的情况下,与其相应地进行检测值的校正。即,在负载了规定值以上的转矩的情况下,会在与齿条5b的齿条端部抵接的状态下进一步施加力,会在电动动力转向装置的轴产生变形(例如扭曲、扭
转)。通过进行该变形量的校正,从而进行精度更高的齿条端部位置的检测。图3的虚线301表示右方向的转矩达到阈值th
ur
的位置,当检测到比该位置高的转矩时,进行与变形相应的校正。校正了变形的位置在图3中成为作为齿条端部位置(在此为右侧)而表示的虚线。
[0095]
[处理流程]
[0096]
图4是本实施方式的eps-ecu30的整个处理的流程图。如上所述,本处理流程例如通过由eps-ecu30所具备的cpu(未图示)读取存储于存储装置(未图示)的程序并执行,从而被实现为图2所示的各部位的功能。
[0097]
在s401中,eps-ecu30进行齿条端部位置学习处理。关于本工序的详细情况,使用图5、图6在后面叙述。
[0098]
在s402中,eps-ecu30根据在s401的齿条端部位置学习处理中计算出的左右的齿条端部位置,计算齿条5b的中点。在此,计算左右的齿条端部位置的中央的值作为临时中点。
[0099]
在s403中,eps-ecu30根据在s401的齿条端部位置学习处理中计算出的左右的齿条端部位置,计算齿条5b的齿条行程。
[0100]
在s404中,eps-ecu30判定在s403中计算出的齿条行程的值是否处于规定的规格的范围内。具体而言,首先,eps-ecu30计算在s403中计算出的齿条行程与阈值保存部204所保存的标准值之间的差值。然后,eps-ecu30根据该差值是否包含在阈值保存部204所保存的判定允许值(上限、下限)所示的范围内来判定齿条行程的妥当性。在判定为妥当的情况下,eps-ecu30将齿条行程判定标志设定为“妥当”的值。另一方面,在不妥当、即计算出的齿条行程未处于规定的规格的情况下,eps-ecu30将齿条行程判定标志设定为“不妥当”的值。
[0101]
在s405中,eps-ecu30基于s404的判定处理的结果,判定在s403中计算出的齿条行程是否妥当。在此,可以参照上述的齿条行程判定标志的值来判定。在判定为妥当的情况下(s405:是),eps-ecu30的处理进入s410。另一方面,在判定为不妥当的情况下(s405:否),eps-ecu30的处理进入s406。
[0102]
在s406中,eps-ecu30判定异常判定计数器的值是否为阈值以上。这里的阈值被预先规定并保存在存储部等中。阈值例如可以设定为“2”。异常判定计数器示出判定为基于检测出的齿条端部而计算出的齿条行程的值不妥当的次数。在规定次数以上判定为齿条行程的值不妥当的情况下,有可能齿条5b其本身产生异常,或装配有不适合的齿条5b。此外,有时在构成机构部的其他部位产生某些异常。在异常判定计数器的值为阈值以上的情况下(s406:“是”),eps-ecu30的处理进入s409。另一方面,在异常判定计数器的值小于阈值的情况下(s406:“否”),eps-ecu30的处理进入s407。
[0103]
在s407中,eps-ecu30废弃当前学习到的齿条端部位置的极限值。然后,eps-ecu30的处理进入s408。
[0104]
在s408中,eps-ecu30使异常判定计数器的值递增1。然后,eps-ecu30的处理返回s401,再次执行齿条端部位置学习处理。
[0105]
在s409中,eps-ecu30进行表示齿条脱离了标准的异常通知。这里的通知方法没有特别限定,例如,既可以在画面(未图示)上视觉地通知,也可以通过声音等以听觉方式通知。或者,也可以是对eps-ecu30进行协作的各种部位进行信号通知的结构。然后,结束本处理流程。
[0106]
在s410中,eps-ecu30基于在s402中计算出的临时中点来计算转向角基准点。具体而言,eps-ecu30基于在s402中算出的临时中点与直行状态下的齿条5b的位置的差异,确定正确的中点。直行状态下的齿条5b的位置可以预先规定。或者,也可以在使用图6而后述的极限值学习处理中,在车辆直行时确定齿条5b的位置,并使用该值。然后,以该正确的中点为基准,设定齿条5b的绝对位置(绝对转向角)。然后,结束本处理流程。
[0107]
(齿条端部学习处理)
[0108]
图5是本实施方式所涉及的齿条端部学习处理的流程图。本处理流程与图4的s401的工序对应。
[0109]
在s501中,eps-ecu30进行初始化处理。在此的初始化处理中,例如,可以是学习左右的齿条端部位置时使用的存储区域、齿条行程判定标志的初始化。另外,也可以将表示齿条端部位置的学习状态的信息初始化为表示未学习。另外,也可以是对保存计算出的齿条中点、齿条行程的存储区域进行初始化的处理。另外,在初次执行齿条端部位置学习处理的情况下,也可以包括对异常判定计数器的值进行初始化的处理。
[0110]
在s502中,eps-ecu30判定齿条5b的左右的齿条端部位置的学习是否结束。在左右的齿条端部位置的学习结束的情况下(s502:“是”),结束本处理流程,eps-ecu30进入图4的s402的处理。另一方面,在左右的至少一个齿条端部位置的学习未结束的情况下(s502:“否”),eps-ecu30进入s503。
[0111]
在s503中,eps-ecu30从各种检测部、计算部获取用于学习如图2所示的齿条端部位置的各种信号。
[0112]
在s504中,eps-ecu30判定在s503中获取的信号是否为正常值。对于这里的判定,例如可以预先对各种信号设定判定为正常值的范围,并通过与该范围的比较来进行。另外,在各种信号中的任一个信号无法获取的情况下,也可以判定为不是正常值。在判定为是正常值的情况下(s504:“是”),eps-ecu30的处理进入s505。另一方面,在判定为不是正常值的情况下(s504:“否”),eps-ecu30的处理进入s509。
[0113]
在s505中,eps-ecu30判定对方向盘1进行的转向方向是否为右。在转向方向为右的情况下(s505:“是”),eps-ecu30的处理进入s506。另一方面,在转向方向不为右(即,转向方向为左)的情况下(s505:“否”),eps-ecu30的处理进入s507。
[0114]
在s506中,eps-ecu30将学习方向设定为右。例如,将表示齿条端部位置的学习状态(右)的信息设定为“学习中”。然后,eps-ecu30的处理进入s508。
[0115]
在s507中,eps-ecu30将学习方向设定为左。例如,将表示齿条端部位置的学习状态(左)的信息设定为“学习中”。然后,eps-ecu30的处理进入s508。
[0116]
在s508中,eps-ecu30与所设定的学习方向对应地进行极限值学习处理。本工序的详细内容使用图6在后面叙述。在本处理结束后,eps-ecu30的处理返回s502,反复进行处理。
[0117]
在s509中,eps-ecu30将齿条行程设定为未确定状态。在处于未确定状态的情况下,例如也可以是限制针对转向的一部分功能的结构。然后,eps-ecu30的处理返回s502,反复进行处理。在此,也可以是在规定期间待机的基础上返回s502的结构。即,可以待机直至成为能够获取正常的信号的状态。另外,也可以通过与图4的s409同样的方法通知所获取到的信号不是正常值。
ecu30的处理进入s609。另一方面,在转向转矩的绝对值小于阈值th
l
的情况下(s608:“否”),本处理流程结束,eps-ecu30的处理进入图5的s502。
[0132]
在s609中,eps-ecu30基于所获取的转向角(相对转向角),将齿条端部位置的峰值更新为极限位置。另外,也可以保存峰值被更新的时刻的各种信号(信息)。另外,也可以保存施加于机构部的转向力的最大值。
[0133]
在s610中,eps-ecu30判定转向转矩的绝对值是否为阈值thu以上。在学习方向为右的情况下,设定与图3所示的阈值th
ur
对应的值,在学习方向为左的情况下,设定与图3所示的阈值th
ul
对应的值。在转向转矩的绝对值为阈值thu以上的情况下(s610:“是”),eps-ecu30的处理进入s611。另一方面,在转向转矩的绝对值小于阈值thu的情况下(s610:“否”),本处理流程结束,eps-ecu30的处理进入图5的s502。在该情况下,继续进行设定方向的学习处理。
[0134]
在s611中,eps-ecu30基于所获取的转向力执行所获取的转向角的校正处理。这里的校正处理是用于校正因过度的转矩而产生的机构部的变形量的处理。例如,可以使用由机构部的绕轴的刚性和转向力的值定义的校正量的表格来进行校正。或者,也可以使用预先规定的计算进行校正。作为进行校正时的计算式,例如也可以使用以下的式。
[0135]
(校正式)
[0136]
校正后的极限位置=极限位置-变形量
[0137]
变形量=(实际q轴电流
×
转矩常数
×
减速比 转向转矩)/机构部的刚性值
[0138]
在上述的式中,示出了使用实际q轴电流iq的例子,但也可以代替此而使用转矩轴电流指令值。另外,也可以使用省略了这些部分的项的式子。另外,也可以考虑与角速度对应的粘性力、与角加速度对应的惯性力。在校正处理之后,eps-ecu30的处理进入s612。
[0139]
在步骤s612中,eps-ecu30将基于所获取的转向角更新的峰值存储为学习方向的极限值。该极限值对应于学习方向的齿条端部位置。然后,eps-ecu30将表示齿条端部位置的学习状态的信息设定为“已学习”,结束本处理流程。之后,eps-ecu30的处理进入图5的s502。
[0140]
以上,根据本实施方式,能够以更高的精度检测转向装置中的左右的齿条端部位置。
[0141]
《第二实施方式》
[0142]
以下,对本发明的第二实施方式进行说明。另外,对于与第一实施方式重复的部位省略说明,在此着眼于差异进行说明。与第一实施方式的差异是使用图6所述的极限值学习处理的内容不同。
[0143]
(极限值学习处理)
[0144]
图7是第二实施方式所涉及的极限值学习处理的流程图。本处理流程与图5的s508的工序对应。这里的处理根据在图5的处理流程中设定的学习方向而左右调换,但基本的处理的流程相同。
[0145]
图7中的s701~s707的工序与第一实施方式中所述的图6的s601~s607的工序相同,因此在此省略s701~s707的处理的内容的说明。在s703的处理中判定为没有脱离条件的情况下(s703:“否”),或者在s707的处理之后,eps-ecu30的处理进入s708。
[0146]
在s708中,eps-ecu30判定转向转矩的绝对值是否为阈值thu以上。在学习方向为
右的情况下,设定与图3所示的阈值th
ur
对应的值,在学习方向为左的情况下,设定与图3所示的阈值th
ul
对应的值。在转向转矩的绝对值为阈值thu以上的情况下(s708:“是”),eps-ecu30的处理进入s709。另一方面,在转向转矩的绝对值小于阈值thu的情况下(s708:“否”),eps-ecu30的处理进入s710。
[0147]
在s709中,eps-ecu30将表示转向转矩的绝对值成为阈值thu以上的标志设为on。阈值thu被设定为表示转向角到达齿条端部的值,通过将标志设为on来存储已到达齿条端部的内容。之后,eps-ecu30的处理进入s711。
[0148]
在s710中,eps-ecu30判定标志是否为on。在标志为on的情况下(s710:“是”),eps-ecu30的处理进入s711。另一方面,在标志不是on的情况下(s710:“否”),结束本处理流程,进入图5的s502。
[0149]
在s711中,eps-ecu30存储该时刻的转向角。然后,eps-ecu30的处理进入s712。
[0150]
在s712中,eps-ecu30判定转向转矩的绝对值是否小于阈值th
l
。在学习方向为右的情况下,设定与图3所示的阈值th
lr
对应的值,在学习方向为左的情况下,设定与图3所示的阈值th
ll
对应的值。阈值th
l
可以设定为转向转矩、由致动器产生的驱动力变小到使机构部的变形充分地被消除的程度的值。在转向转矩的绝对值小于阈值thl的情况下(s712:“是”),eps-ecu30的处理进入s713。另一方面,在转向转矩的绝对值为阈值th
l
以上的情况下(s712:“否”),本处理流程结束,eps-ecu30的处理进入图5的s502。在该情况下,继续进行设定方向的学习处理。
[0151]
在s713中,eps-ecu30将在s711中存储的转向角作为学习方向的极限值进行存储。该极限值对应于学习方向的齿条端部位置。然后,eps-ecu30将表示齿条端部位置的学习状态的信息设定为“已学习”,结束本处理流程。之后,eps-ecu30的处理进入图5的s502。
[0152]
如以上说明的那样,在本实施方式的极限值学习处理中,在s708中判定一次到达了齿条端部,在s712中判定机构部的变形被消除。由此,能够以更高的精度检测转向装置中的左右的齿条端部位置。
[0153]
《其他实施方式》
[0154]
另外,电动动力转向装置的结构并不限定于图1所示的结构。例如,电动动力转向装置也可以由方向盘1侧和小齿轮齿条机构5侧机械地分离的线控转向(sbw:steer-by-wire)机构构成。
[0155]
另外,电动动力转向装置的结构可以是柱轴辅助,也可以是齿条轴辅助,本发明所涉及的方法均能够应用。
[0156]
在上述的实施方式中,以驾驶员操作方向盘1为前提进行了说明。但是,并不限定于该结构,例如,作为驾驶辅助功能的一环,也可以在车辆侧进行转向角操作来检测齿条端部位置。在该情况下,无法利用驾驶员的转向转矩的信息,因此考虑使用控制偏差来代替该信息。控制偏差例如可以是目标角与实际转向角的差异。而且,控制偏差的大小超过第一规定值(对应于第一实施方式的阈值th
l
)的情况下开始学习,在达到第二规定值(对应于第一实施方式的阈值thu)的情况下结束学习。或者,也可以代替控制偏差而使用由致动器产生的驱动力。在这些情况下,在变形量的计算、电动动力转向装置的绕轴的转向力的计算中,仅考虑由致动器产生的驱动力即可。
[0157]
另外,在车辆侧进行转向角操作来检测齿条端部位置时,也可以进行对目标角施
加限制的控制,以避免控制偏差过度变大。同样地,为了防止向机构部的向齿条端部的按压(抵接)的过负荷,也可以是限制向致动器的指令电压的结构。
[0158]
另外,在第一实施方式中,示出了在极限值学习处理(图6)的流程中进行校正处理(图6的s611)的结构,但并不限定于此。例如,也可以是在左右的齿条端部位置的学习处理完成之后执行校正处理的结构(例如,图4的s401与s402之间)。在该情况下,在极限值学习处理中,可以将用于计算变形量的信息作为历史来保存,使用该信息进行校正处理。
[0159]
另外,在第二实施方式中,示出了在图7的处理流程中不进行第一实施方式所示的校正处理(图6的s611)的结构,但也可以是进一步进行该处理的结构。
[0160]
另外,在第一实施方式中,作为图6的s603的脱离条件,判定转向力的最大值与当前的转向力的大小之差是否超过规定的阈值,但并不限定于此。例如,可以根据基于转向力的变形量的最大值与当前的变形量的差是否超过规定的阈值来进行判定。或者,也可以根据转向转矩的最大值与当前的转向转矩之差是否超过规定的阈值来进行判定。这在第二实施方式的图7的s703中也是同样的。
[0161]
另外,也可以使用转向转矩来判定学习开始以及完成,但也可以使用与转向转矩等价的扭杆的上游侧角度与下游侧角度的差来判定学习开始以及完成。此时,可以对由致动器产生的驱动力以及由转矩检测单元检测出的转向转矩分别设定阈值,通过各自的比较结果的逻辑和来进行判定。另外,也可以使用由致动器产生的驱动力以及由所述转矩检测单元检测出的转向转矩的相加值或者由致动器产生的驱动力来判定学习开始以及完成。或者,也可以将这些对象组合来判定学习开始和结束。
[0162]
另外,在本发明中,也能够通过使用网络或者存储介质等将用于实现上述一个以上实施方式的功能的程序、应用提供给系统或者装置,该系统或者装置的计算机中的一个以上处理器读取并执行程序的处理来实现。
[0163]
这样,本发明并不限定于上述实施方式,将实施方式的各结构相互组合、基于说明书的记载、以及公知的技术,本领域技术人员进行变更、应用也是本发明的预定内容,包括在要求保护的范围内。
[0164]
如上所述,在本说明书中公开有如下的事项。
[0165]
(1)一种检测装置,其特征在于,
[0166]
是对转向装置所具备的机构部的左右的转向方向各自的端部位置进行检测的检测装置,并且具有:
[0167]
转向角检测单元,所述转向角检测单元检测所述机构部中的转向角;
[0168]
致动器,所述致动器驱动所述机构部;
[0169]
转矩检测单元,所述转矩检测单元检测对所述机构部的转向转矩;以及
[0170]
极限位置检测单元,所述极限位置检测单元检测所述机构部中的左右的转向方向各自的极限位置,
[0171]
所述极限位置检测单元
[0172]
当通过由所述致动器产生的驱动力以及由所述转矩检测单元检测出的转向转矩中的至少一者而被负载的所述机构部的转矩值超过第一阈值时,开始检测所述转矩值的方向上的转向角的极限位置,
[0173]
在所述机构部的转矩值处于所述第一阈值与比所述第一阈值大的第二阈值之间
的期间,通过将由所述转向角检测单元检测出的转向角的峰值作为极限位置进行存储,从而继续检测所述极限位置,
[0174]
在所述机构部的转矩值超过所述第二阈值时,将所存储的极限位置作为所述转矩值所表示的转向方向上的端部位置,结束所述极限位置的检测。
[0175]
根据该结构,能够以更高的精度检测转向装置中的左右的齿条端部位置。
[0176]
(2)根据(1)所述的检测装置,其特征在于,
[0177]
还具有第一计算单元,所述第一计算单元基于由所述极限位置检测单元检测出的左右的端部位置,计算所述机构部中的转向的行程。
[0178]
根据该结构,能够基于高精度地检测出的齿条端部位置来计算齿条行程。
[0179]
(3)根据(2)所述的检测装置,其特征在于,
[0180]
在所述第一计算单元计算出的行程不包括在规定的范围内的情况下,所述极限位置检测单元将检测出的端部位置废弃,再次进行所述极限位置的检测。
[0181]
根据该结构,在假设误检测了齿条行程的情况下,再次检测齿条端部位置,由此能够更高精度地检测齿条端部位置以及齿条行程。
[0182]
(4)根据(3)所述的检测装置,其特征在于,
[0183]
还具有判定单元,在作为由所述第一计算单元计算出的行程不包括在所述规定的范围内而进行所述极限位置的检测的次数超过了规定的次数的情况下,所述判定单元判定为设置有非标准的机构部。
[0184]
根据该结构,即使在设置了规格外的机构部的情况下,也能够检测出该情况。
[0185]
(5)根据(1)至(4)中任一项所述的检测装置,其特征在于,
[0186]
还具有第二计算单元,所述第二计算单元基于由所述极限位置检测单元检测出的左右的端部位置,计算成为所述机构部中的转向角的基准点的中点。
[0187]
根据该结构,能够基于高精度地检测出的齿条端部位置来计算齿条的中点。
[0188]
(6)根据(6)所述的检测装置,其特征在于,
[0189]
将由所述第二计算单元计算出的中点与搭载有所述转向装置的车辆处于直行状态时的所述机构部中的转向角的差异设为偏移量,
[0190]
以所述偏移量对所述中点的位置进行校正而得到的位置被用作所述机构部的绝对位置的基准。
[0191]
根据该结构,能够高精度地导出齿条的绝对位置。
[0192]
(7)根据(1)至(6)中任一项所述的检测装置,其特征在于,
[0193]
还具有校正单元,所述校正单元对由所述极限位置检测单元检测出的端部位置进行校正,
[0194]
所述校正单元基于在检测所述极限位置的期间的因对所述机构部的负载而产生的所述机构部的变形量,对所述端部位置进行校正。
[0195]
根据该结构,能够考虑因对机构部的过负载而产生的机构部的变形(例如扭转)来检测齿条端部位置。
[0196]
(8)根据(7)所述的检测装置,其特征在于,
[0197]
所述机构部的变形量基于所述机构部的转矩轴电流或转矩轴电流指令值、所述机构部的转矩常数、所述致动器的减速比以及所述机构部的刚性中的至少一者而导出。
[0198]
根据该结构,能够基于机构部的转矩轴电流或转矩轴电流指令值、机构部的转矩常数、致动器的减速比以及机构部的刚性中的至少一者,计算出过负荷时的变形量。
[0199]
(9)根据(1)至(8)中任一项所述的检测装置,其特征在于,
[0200]
在基于由所述转向角检测单元检测出的转向角导出的角速度超过规定的阈值的情况下,所述极限位置检测单元暂时停止检测所述极限位置。
[0201]
根据该结构,通过在转向稳定的状态时进行齿条端部位置的检测,能够进行更高精度的检测。
[0202]
(10)根据(1)至(9)中任一项所述的检测装置,其特征在于,
[0203]
在搭载有所述转向装置的车辆的速度超过规定的阈值的情况下,所述极限位置检测单元暂时停止检测所述极限位置。
[0204]
根据该结构,通过在车辆的行驶稳定的状态时进行齿条端部位置的检测,能够进行更高精度的检测。
[0205]
(11)根据(1)至(10)中任一项所述的检测装置,其特征在于,
[0206]
在所述极限位置的检测中,在所述转矩值的最大值与当前时刻的所述转矩值的差异超过规定的阈值的情况下,所述极限位置检测单元暂时停止所述极限位置的检测。
[0207]
根据该结构,通过在转向转矩稳定的状态时进行齿条端部位置的检测,由此能够进行更高精度的检测。
[0208]
(12)根据(9)至(11)中任一项所述的检测装置,其特征在于,
[0209]
在暂时停止所述极限位置的检测时,在所述机构部中的转向方向为相反方向的情况下,或者在转矩值低于规定的阈值的情况下,所述极限位置检测单元解除暂时停止。
[0210]
根据该结构,在满足规定的条件的情况下,能够使极限位置的检测再次开始。
[0211]
(13)一种检测装置,其特征在于,
[0212]
是对转向装置所具备的机构部的左右的转向方向各自的端部位置进行检测的检测装置,并且具有:
[0213]
转向角检测单元,所述转向角检测单元检测所述机构部中的转向角;
[0214]
致动器,所述致动器驱动所述机构部;
[0215]
转矩检测单元,所述转矩检测单元检测对所述机构部的转向转矩;以及
[0216]
极限位置检测单元,所述极限位置检测单元检测所述机构部中的左右的转向方向各自的极限位置,
[0217]
所述极限位置检测单元
[0218]
当通过由所述致动器产生的驱动力以及由所述转矩检测单元检测出的转向转矩中的至少一者而负载的所述机构部的转矩值超过第一阈值时,开始检测所述转矩值的方向上的转向角的极限位置,
[0219]
在所述机构部的转矩值处于所述第一阈值与比所述第一阈值小的第二阈值之间的期间,通过将由所述转向角检测单元检测出的转向角作为极限位置进行存储,从而继续进行所述极限位置的检测,
[0220]
在所述机构部的转矩值小于所述第二阈值时,将所存储的极限位置作为所述转矩值所表示的转向方向上的端部位置,结束所述极限位置的检测。
[0221]
根据该结构,能够以更高的精度检测转向装置中的左右的齿条端部位置。
[0222]
(14)一种检测方法,其特征在于,
[0223]
是对转向装置所具备的机构部的左右的转向方向各自的端部位置进行检测的检测方法,并且
[0224]
在通过由驱动所述机构部的致动器产生的驱动力以及对所述机构部的转向转矩中的至少一者而负载的所述机构部的转矩值超过第一阈值时,开始检测所述转矩值的方向上的转向角的极限位置,
[0225]
在所述机构部的转矩值处于所述第一阈值与比所述第一阈值大的第二阈值之间的期间,通过将所述机构部中的转向角的峰值作为极限位置进行存储,从而继续进行所述极限位置的检测,
[0226]
在所述机构部的转矩值超过所述第二阈值时,将所存储的极限位置作为所述转矩值所表示的转向方向上的端部位置,结束所述极限位置的检测。
[0227]
根据该结构,能够以更高的精度检测转向装置中的左右的齿条端部位置。
[0228]
(15)一种程序,其特征在于,
[0229]
是用于使计算机执行对转向装置所具备的机构部的左右的转向方向各自的端部位置进行检测的检测方法的程序,
[0230]
所述检测方法
[0231]
在通过由驱动所述机构部的致动器产生的驱动力以及对所述机构部的转向转矩中的至少一者而负载的所述机构部的转矩值超过第一阈值时,开始检测所述转矩值的方向上的转向角的极限位置,
[0232]
在所述机构部的转矩值处于所述第一阈值与比所述第一阈值大的第二阈值之间的期间,通过将所述机构部中的转向角的峰值作为极限位置进行存储,从而继续进行所述极限位置的检测,
[0233]
在所述机构部的转矩值超过所述第二阈值时,将所存储的极限位置作为所述转矩值所表示的转向方向上的端部位置,结束所述极限位置的检测。
[0234]
根据该结构,能够以更高的精度检测转向装置中的左右的齿条端部位置。
[0235]
以上,参照附图对各种实施方式进行了说明,但本发明当然并不限定于该例子。只要是本领域技术人员,就能够在权利要求书所记载的范畴内想到各种变更例或校正例,这些当然也属于本发明的技术范围。另外,在不脱离发明的主旨的范围内,也可以任意地组合上述实施方式中的各构成要素。
[0236]
另外,本技术基于2021年3月12日申请的日本专利申请(日本特愿2021-040398),其内容作为参照引用于本技术中。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。