1.本发明属于航空航天领域,特别是涉及一种可实现二维二次展开零重力吊挂装置。
背景技术:
2.目前航天领域可展开机构多为一维展开方式,如传统平台的刚性太阳帆板、天线等。传统的零重力吊挂系统或零重力气浮系统难以满足产品的二维展开方式,给地面模拟零重力展开环境带来一定的困难和复杂性。
技术实现要素:
3.有鉴于此,本发明旨在提出一种可实现二维二次展开零重力吊挂装置,以解决现有零重力吊挂系统或零重力气浮系统难以满足产品的二维展开方式,给地面模拟零重力展开环境带来一定的困难和复杂性的问题。
4.为实现上述目的,本发明采用以下技术方案:一种可实现二维二次展开零重力吊挂装置,它包括桁架、两个长导轨、吊挂组件、摇臂架组件、外板以及内板,所述两个长导轨设置在桁架下方两侧,所述摇臂架组件沿竖直方向转动设置在桁架底部,所述吊挂组件设置在两个长导轨底部并与两个长导轨滑动连接,所述外板沿水平方向转动设置在吊挂组件底部,所述内板与摇臂架组件底部相连,所述摇臂架组件带动内板沿竖直方向转动。
5.更进一步的,所述桁架与长导轨之间通过多个调节连接件连接,所述多个调节连接件沿桁架长度方向均匀设置在桁架底部。
6.更进一步的,所述调节连接件包括转接方管和调节组合件,所述转接方管固接在桁架底部,所述长导轨与转接方管之间通过调节组合件连接。
7.更进一步的,所述调节组合件包括左旋螺杆、螺杆和调节体,所述左旋螺杆与转接方管通过左旋螺母连接,所述螺杆与长导轨通过螺母连接,所述左旋螺杆与螺杆之间通过调节体相连,所述左旋螺杆与螺杆均与调节体滑动配合。
8.更进一步的,所述摇臂架组件包括转接框架、轴承座、旋转轴、连接杆、导轨、第一滑轮组件、双眼调节器、测力计和第一吊杆,所述转接框架设置在桁架底部并与转接方管连接,所述轴承座与转接框架通过固定螺杆连接,所述旋转轴与轴承座转动配合,所述导轨一端与旋转轴底部一侧转动连接,所述另一端通过连接杆与旋转轴顶部一侧连接,所述第一滑轮组件滑动设置在导轨上,所述双眼调节器顶端与第一滑轮组件相连,底端通过弹簧扣与测力计相连,所述第一吊杆设置在测力计下方,所述第一吊杆与测力计之间通过钢丝绳连接。
9.更进一步的,所述吊挂组件为配重吊挂组件,所述配重吊挂组件包括两个短导轨、配重横梁、第二吊杆和配重块,所述短导轨的两端分别与两个长导轨滑动连接,所述配重横梁两端分别与两个短导轨滑动连接,所述配重横梁两端底部均设有滑轮,所述第二吊杆与配重块之间通过钢丝绳与两个滑轮配合连接,所述外板转动设置在第二吊杆下方。
10.更进一步的,所述吊挂组件为恒力弹簧吊挂组件,所述恒力弹簧吊挂组件包括短导轨、双环调节器、恒力弹簧和第二吊杆,所述短导轨的两端分别与两个长导轨滑动连接,所述短导轨上滑动连接有第二滑轮组件,所述双环调节器顶端与第二滑轮组件相连,底端通过弹簧扣与恒力弹簧相连,所述第二吊杆设置在恒力弹簧下方,所述第二吊杆与恒力弹簧之间通过钢丝绳连接,所述外板转动设置在第二吊杆下方。
11.更进一步的,所述短导轨的两端均设置有第二滑轮组件,所述第二滑轮组件与长导轨滑动连接。
12.更进一步的,所述钢丝绳的一端与第二吊杆的中间位置连接。
13.更进一步的,所述第二吊杆两端的下方分别转动设置有左连接件和右连接件,所述外板的两端分别与左连接件和右连接件连接。
14.与现有技术相比,本发明的有益效果是:
15.1、本发明中应用了吊挂组件以及摇臂架组件实现了配重和吊挂的两种抵消重量的方式组合实现产品的二维展开方式;
16.2、本发明装置操作简单可靠,有效的实现了产品的二维展开方式。
附图说明
17.构成本发明的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
18.图1为本发明所述的一种可实现二维二次展开零重力吊挂装置的整体结构示意图;
19.图2为本发明所述的一种可实现二维二次展开零重力吊挂装置的调节组合件的结构示意图;
20.图3为本发明所述的一种可实现二维二次展开零重力吊挂装置摇臂架组件的结构示意图;
21.图4为本发明所述的一种可实现二维二次展开零重力吊挂装置的配重吊挂组的结构示意图;
22.图5为本发明所述的一种可实现二维二次展开零重力吊挂装置的整体结构三维示意图;
23.图6为本发明所述的一种可实现二维二次展开零重力吊挂装置的内板外板工作到位的三维示意图;
24.图7为本发明所述的一种可实现二维二次展开零重力吊挂装置的第一滑轮组件和第二滑轮组件的结构示意图;
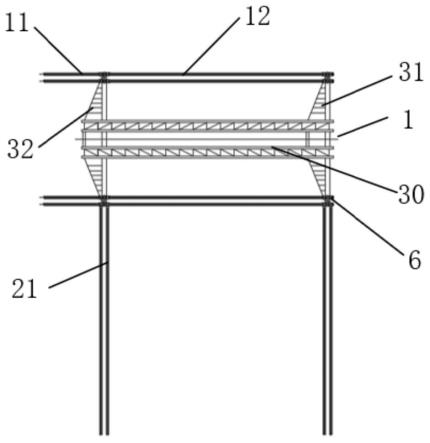
25.图8为本发明所述的一种可实现二维二次展开零重力吊挂装置的恒力弹簧吊挂组件的结构示意图;
26.1-桁架,2-转接方管,3-调节组合件,4-长导轨,5-配重吊挂组件,6-摇臂架组件,7-内板,8-外板,9-左旋螺母,10-左旋螺杆,11-调节体,12-螺母,13-螺杆,14-转接框架,15-固定螺杆,16-轴承座,17-旋转轴,18-连接杆,19-导轨,20-第一滑轮组件,21-双眼调节器,22-弹簧扣,23-测力计,24-第一吊杆,25-第二滑轮组件,26-短导轨,27-配重横梁,28-第二吊杆,29-左连接件,30-右连接件,31-配重块,32-双环调节器,33-恒力弹簧。
具体实施方式
27.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地阐述。需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
28.实施例一:
29.参见图1-7说明本实施例一,一种可实现二维二次展开零重力吊挂装置,它包括桁架1、两个长导轨4、吊挂组件、摇臂架组件6、外板8以及内板7,所述两个长导轨4设置在桁架1下方两侧,所述摇臂架组件6沿竖直方向转动设置在桁架1底部,所述吊挂组件设置在两个长导轨4底部并与两个长导轨4滑动连接,所述外板8沿水平方向转动设置在吊挂组件底部,所述内板7与摇臂架组件6底部相连,所述摇臂架组件6带动内板7沿竖直方向转动。
30.本实施例中桁架1用于为展开架的长导轨4、吊挂组件和摇臂架组件6提供刚性平台,使其自身达到力平衡和保持较好的刚性,吊挂组件实现了外板8沿水平方向转动90
°
的工作方式,摇臂架组件6实现了内板7沿竖直方向转动90
°
的工作方式,可实现模拟内板7和外板8零重力展开环境,即外板8沿水平方向转动90
°
到位后,进而在实现内板7沿竖直方向转动90
°
的展开方式,其中摇臂架组件6与吊挂组件分别能够抵消内板7与外板8的自身重量,实现模拟零重力环境,进而实现模拟内板7和外板8整个工作过程的零重力环境。
31.本实施例中所述桁架1与长导轨4之间设置有多个调节连接件,所述多个调节连接件沿桁架1长度方向均匀设置在桁架1底部,所述桁架1与长导轨4之间通过调节连接件连接,所述调节连接件包括转接方管2和调节组合件3,所述转接方管2固接在桁架1底部,所述长导轨4与转接方管2之间通过调节组合件3连接,所述调节组合件3包括左旋螺杆10、螺杆13和调节体11,所述左旋螺杆10与转接方管2通过左旋螺母9连接,所述螺杆13与长导轨4通过螺母12连接,所述左旋螺杆10与螺杆13之间通过调节体11相连,所述左旋螺杆10与螺杆13均与调节体11滑动配合,本实施例通过转接方管2和调节组合件3将长导轨4固定在桁架1上,并通过调节组合件3的调节作用调节两个长导轨4满足一定要求的直线度和水平度,通过调节体11上的左旋螺杆10和螺杆13,使得长导轨4满足一定要求的直线度和水平度,调节到位后,用左旋螺母9和螺母12进行拧紧固定,即长导轨的调节完成。
32.本实施例中所述摇臂架组件6包括转接框架14、轴承座16、旋转轴17、连接杆18、导轨19、第一滑轮组件20、双眼调节器21、测力计23和第一吊杆24,所述转接框架14设置在桁架1底部并与转接方管2连接,所述轴承座16与转接框架14通过固定螺杆15连接,所述旋转轴17与轴承座16转动配合,所述导轨19一端与旋转轴17底部一侧转动连接,所述另一端通过连接杆18与旋转轴17顶部一侧连接,所述第一滑轮组件20滑动设置在导轨19上,所述双眼调节器21顶端与第一滑轮组件20相连,底端通过弹簧扣22与测力计23相连,所述第一吊杆24设置在测力计23下方,所述第一吊杆24与测力计23之间通过钢丝绳连接,摇臂架组件6是满足内板7沿竖直方向转动90
°
方式设计而成,原理是调节摇臂架组件6通过内板7的质心抵消其内板7的本身重量,实现模拟零重力环境,转接框架14通过固定螺杆15与桁架1固定在一起,连接杆18可起到加强作用,同时也通过伸缩连接杆18调节导轨19的水平度,使导轨19满足使用要求,双眼调节器21调节第一吊杆24的竖直高度,第一滑轮组件20可使得第一吊杆24在6导轨上做直线运动,第一吊杆24与内板7之间通过螺栓进行连接,通过调节测力计23的示数与内板7的重量一致,使得内板7实现重力抵消,摇臂架组件6通过旋转轴17与轴
承座16实现导轨19在水平面内做水平圆周运动,从而实现内板7沿竖直方向上的转动,在导轨19上第一滑轮组件20也能实现内板7的直线运动。
33.本实施例中所述吊挂组件为配重吊挂组件5,所述配重吊挂组件5包括两个短导轨26、配重横梁27、第二吊杆28和配重块31,所述短导轨26的两端分别与两个长导轨4滑动连接,所述配重横梁27两端分别与两个短导轨26滑动连接,所述配重横梁27两端底部均设有滑轮,所述第二吊杆28与配重块31之间通过钢丝绳与两个滑轮配合连接,所述外板8转动设置在第二吊杆28下方,所述短导轨26的两端均设置有第二滑轮组件25,所述第二滑轮组件25与长导轨4滑动连接,所述钢丝绳的一端与第二吊杆28的中间位置连接,所述第二吊杆28两端的下方分别转动设置有左连接件29和右连接件30,所述外板8的两端分别与左连接件29和右连接件30连接,第二滑轮组件25通过两个短导轨26带动配重吊挂组件5在长导轨4上滑动,配重吊挂组件是为满足外板8沿水平方向转动90
°
工作方式设计而成,原理是通过配重块31配重方式抵消外板8的本身重量,实现模拟零重力环境,通过左连接件29和右连接件30将外板8与第二吊杆28连接在一起,左连接件29和右连接件30带动外板8沿水平方向转动,外板8转动的同时带着钢丝绳和配重块31通过配重横梁27两端的滑轮一起向上运动,完成零重力模拟工作。
34.本实施例中第一滑轮组件20与第二滑轮组件25均主要由滑轮座本体和滚动轴承组成。
35.实施例二:
36.参见图8说明本实施例二,本实施例中所述吊挂组件为恒力弹簧吊挂组件,其他结构与实施例一相同。
37.本实施例中所述恒力弹簧吊挂组件包括短导轨26、双环调节器32、恒力弹簧33和第二吊杆28,所述短导轨26的两端分别与两个长导轨4滑动连接,所述短导轨26上滑动连接有第二滑轮组件25,所述双环调节器32顶端与第二滑轮组件25相连,底端通过弹簧扣22与恒力弹簧33相连,所述第二吊杆28设置在恒力弹簧33下方,所述第二吊杆28与恒力弹簧33之间通过钢丝绳连接,所述外板8转动设置在第二吊杆28下方,所述短导轨26的两端均设置有第二滑轮组件25,所述第二滑轮组件25与长导轨4滑动连接,所述钢丝绳的一端与第二吊杆28的中间位置连接,所述第二吊杆28两端的下方分别转动设置有左连接件29和右连接件30,所述外板8的两端分别与左连接件29和右连接件30连接,本实施例中恒力弹簧吊挂组件与实施例一中的配重吊挂组件5原理相同,仅用恒力弹簧33代替了配重块31的抵消重力方式,双环调节器32用来调节第二吊杆28的竖直高度。
38.上述实施例一与实施例二应用了吊挂组件以及摇臂架组6件实现了配重和吊挂的两种抵消重量的方式组合实现产品的二维展开方式。
39.上述实施例一与实施例二装置操作简单可靠,有效的实现了产品的二维展开方式。
40.以上公开的本发明实施例只是用于帮助阐述本发明。实施例并没有详尽叙述所有的细节,也不限制该发明仅为所述的具体实施方式。根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本发明。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。