1.本发明涉及天文导航定位技术领域,尤其是涉及一种通过观测卫星在天球上投影点的赤经赤纬值来解算观测者位置的方法。
背景技术:
2.天文导航是一种传统的定位方式,其以已知准确空间位置的自然天体为基准,通过相关仪器测量天体位置,经解算确定测量点所在载体的位置信息。天文导航不需要其他地面设备的支持,所以具有自主导航特性,也不受人工或自然形成的电磁场的干扰,不向外辐射电磁波,隐蔽性好,定位、定向的精度比较高,定位误差不随时间积累。因此在卫星导航得到普遍应用的今天,天文导航技术受到世界各国尤其是各主要军事强国的重视,并在天基、空基、海基等各类载体上进行装备。
3.现有的天文自动导航装备虽不尽相同,但都是以天体高度或天体方位作为观测量,其高度和方位观测均需依托惯性平台提供水平和方向基准。目前国外惯性平台水平精度一般为20~40角秒,其精度的进一步提高极其困难,由此带来的天文自动导航系统的定位理论误差在1000米左右,这与现代作战对高精度导航不相适应。受限于水平基准误差已经成为天文导航向高精度方向发展的瓶颈。因此,摆脱水平基准的制约,突破以高度差原理为核心内容的传统理论制约,发展新的天文导航理论体系是实现高精度天文导航的现实需求。
4.自1954年人类发射了第一颗人造卫星以来,世界各国相继向太空中发射了数以千计的卫星,且随着马斯克星链计划的逐步实施,预计未来几年人造卫星尤其是近地轨道卫星的数量会激增至数万颗。这些人造天体为天文导航提供了新的可观测的天体,海军大连舰艇学院的王安国及华中光电技术研究所宣扬等人也先后提出使用射电对卫星进行探测的方案,这对天文导航的发展提供了新的思路,但目前依然延续了传统的天文定位理论。
5.在天文导航发展的最初阶段,科学家们认为利用月亮对恒星的角距来测定位置是最优的解决方案。这种思路是若天体距离地球较近,测者所观测到的天体在天球上投影点的位置与测者位置相关,即当测者在地球表面位置发生变化时,这个天体在天球上的投影会随之发生变化,若掌握了这个天体准确的运动信息即可解算出测者位置。在所有自然天体中距离地球最近的是月球,因此在初期发展阶段,各国科学家都在探索如何测定月球与其他恒星之间的角距,格林尼治天文台的建立和六分仪的发明都直接或间接与这个方案有关,为了同样目的俄国科学院欧拉院士创立了月球运动理论,格林尼治天文台也于1763年编制出版了为利用月球与恒星角距测定经度的历书。但在该理论随后的发展过程中发现,月球与地球的距离相对于地球半径过于遥远,所观测到的月球在天球上的投影点位置变化不大,因此这个方案被舍弃掉。
6.目前通过光学、射电等技术手段可以对卫星进行精确探测,抛弃传统测量方位高度的思路,沿用数百年前对月球与恒星的角距的思路同样可以实现定位,且由于卫星与地
球距离相对较近,因此可以取得更加精确的定位效果。
技术实现要素:
7.本发明针对现有导航手段的不足,提供一种不依赖水平基准和卫星信号的天文卫星组合导航定位系统及方法。
8.本发明技术方案的基本原理如下:
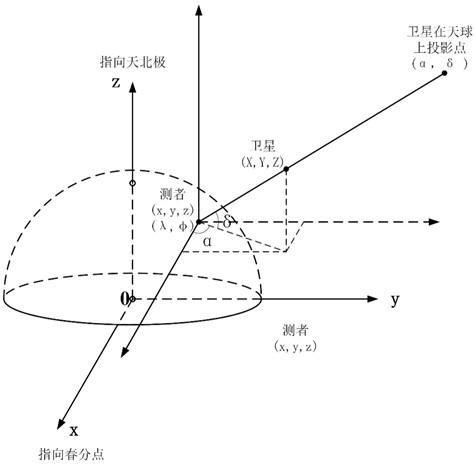
9.如图1所示,在地心惯性坐标系中,地心为坐标原点,x轴指向春分点,z轴指向天北极,y轴通过右手准侧确定。该坐标系为惯性坐标系,各轴指向相对于恒星固定。卫星位置一般使用该坐标系,坐标值为三维直角坐标。地理位置一般采用地理坐标系,坐标值为经纬度表示方式。但在卫星导航、卫星测控等领域,经常需要将地理坐标换算成地心惯性坐标进行解算。
10.设测者位于地球表面某处,地理坐标值为(λ,ф),某卫星位于测者真地平面上且可观测,地心惯性坐标系坐标值为(x,y,z)。测者观测卫星时,观测到的是卫星在天球上的投影点,此时卫星投影点坐标可以使用第二赤道坐标系坐标值表示,即赤经值和赤纬值。通过光学、射电等观测设备可对卫星投影点和恒星之间的角距进行测量,利用天文三角形基本原理即可解算出卫星投影点的赤经赤纬值。
11.在地心惯性坐标系中,如不考虑大气折射、光行差等误差,测者、卫星和卫星在天球上投影点三者处于一条直线。这条直线卫星位置和卫星投影点坐标是已知条件,卫星坐标可以通过轨道方程解算,卫星投影点坐标可进行观测解算,这条空间直线与地球表面的交点即为测者位置。
12.设测者位于海面上,在地心惯性坐标系中的坐标为(x,y,z),则该坐标满足地球椭球体方程,测者、卫星和卫星投影点确定的空间矢量与x轴的夹角为α,与z轴夹角为δ,同样可以建立两个方程,组成三元方程组,解算该方程组即可解算出测者在地心惯性坐标系中的坐标,从而确定测者的位置。
13.现有的天文自动导航理论都是需要在测者地平坐标系中对天体进行度量,由于地平和方向基准存在无法消除的误差,导致现有的天文自动导航装备定位误差较大。本发明采用的是卫星相对于其他天体的角距作为观测量,该观测量不需要以测者真地平面为基准,不包含水平基准和方位误差,另外对卫星的观测可采用光学、红外、射电等多种手段,卫星投影点和参考恒星之间的角距测量亦可获得角秒级的测量精度,因此相对于现有的天文自动导航方法,本发明可以获得较高的测量精度,具有极高的推广应用价值。
14.一种不依赖水平基准和卫星信号的天文卫星组合导航定位系统,其特殊之处在于,包括观测系统、观测控制系统及数据处理系统;
15.所述观测系统用于对自然天体和卫星的观测,其包括搭载于舰艇上的地平空间稳定观测平台,以及固定于地平空间稳定观测平台上的恒星观测设备和卫星观测设备;
16.所述观测控制系统用于控制观测系统和天体识别解算,包括观测控制模块、恒星识别解算模块和卫星识别解算模块;
17.所述数据处理系统主要用于测者位置的解算,包括误差修正模块、投影点解算模块和位置解算模块。
18.在本发明的一个实施例中,所述地平空间稳定观测平台通过地平伺服系统固定于
舰船平台上,地平伺服系统通过观测控制系统发送的舰艇航向姿态信息控制地平空间稳定观测平台到达水平稳定状态;
19.在本发明的一个实施例中,所述恒星观测设备通过恒星观测伺服系统固定于地平空间稳定观测平台,根据观测控制系统所发送的方位角和高度角将恒星观测设备指向预定空间角度,对预定恒星进行搜索识别;
20.在本发明的一个实施例中,所述卫星观测设备通过卫星观测伺服系统固定于地平空间稳定观测平台,根据观测控制系统发送的方位角和高度角将卫星观测设备指向预定空间角度,对预定卫星进行搜索识别;
21.在本发明的一个实施例中,所述恒星观测设备和卫星观测设备可以是光学设备,也可以是红外或者射电探测设备,可设置一组或者多组。
22.在本发明的一个实施例中,所述观测控制模块包括控制数据计算模块和拍摄控制模块。所述控制数据计算模块主要用于计算选用恒星和卫星的方位和高度,并连同舰船航向姿态信息一起发送给观测系统,用于稳定地平空间稳定观测平台和为观测设备提供观测引导数据。拍摄控制模块用于向观测系统发送拍摄触发时刻、触发脉冲间隔和触发脉冲个数,观测系统根据指令完成星图拍摄,并根据时统信息锁存拍摄时刻。
23.在本发明的一个实施例中,所述恒星识别模块包括星表数据库和星图匹配模块。星表数据库主要用于存储自然天体的位置、运动、星等等数据。星图匹配模块主要用于利用星图匹配算法对星敏感器或其他观测设备拍摄的星图进行匹配识别,筛选出角距测量参考星。
24.在本发明的一个实施例中,所述卫星识别模块包括卫星数据库和卫星识别模块。卫星数据库模块用于存储所有在轨卫星的相关数据,并可通过通信系统对卫星数据进行更新。卫星识别模块首先计算卫星星等、角速度等信息,连同星图匹配模块共同用于卫星识别。
25.在本发明的一个实施例中,所述误差修正模块用于对探测数据进行误差修正,包括传感器内部误差修正和外部误差修正。内部误差主要是由于各项参数偏离标称值造成的,并且与传感器的具体结构有关,一般有特定的校正方法。外部误差通常指传感器处于正常工作状态时,除传感器自身以外其他因素产生的误差。内部误差主要包括相机装配误差、热变形误差、像元分辨率等。而外部误差主要包括大气折射和光行差等。
26.在本发明的一个实施例中,所述投影点解算模块包括伪方位高度解算模块、天体角距解算模块和赤经赤纬解算模块。伪方位高度解算模块用于对参考星和卫星在观测平台坐标系的方位和高度进行解算。观测数据虽然经过误差修正,但依然包含观测平台的方位和水平基准误差,因此在观测平台坐标系中测量的方位和高度信息我们称之为伪方位和伪高度。天体角距模块根据参考星和卫星的伪方位和伪高度数据,解算出卫星和参考星的角距,由于同一时刻观测伪方位和伪高度数据包含相同的基准误差,因此求解的天体角距值可以将平台基准误差消除。赤经赤纬解算模块根据卫星和参考星的角距进一步解算出卫星在第二赤道坐标系中的赤经和赤纬。
27.在本发明的一个实施例中,所述位置解算模块用于对测者经纬度信息进行求解,包括实时位置解算模块和平滑滤波模块。实时位置解算模块根据卫星赤经赤纬和卫星实时位置建立视线方程,同地球椭球体方程共同组成方程组,求解该方程组即可求解出测者地
心惯性坐标系中的三维坐标,并可转换成经纬度坐标。平滑滤波模块针对实时更新的测者位置坐标,结合实时推算舰位进行平滑滤波,获得更加精确地测者经纬度信息。
28.基于上述系统,本发明还提出一种不依赖水平基准和卫星信号的天文卫星组合导航定位方法,其特殊之处在于,包括:
29.系统基于获取的舰艇航向及姿态信息,将地平空间稳定观测平台稳定至水平状态;
30.系统基于获取的卫星轨道数据,对卫星识别模块的卫星数据库作实时数据更新;
31.系统获取舰艇推算位置数据和时统信息,并结合星表数据和卫星数据,筛选出参考星和卫星并确定所述参考星和卫星的所在方位及高度数据;
32.恒星观测设备和卫星观测设备分别指向参考星和卫星所在方位,恒星观测设备捕捉星图并通过星图匹配完成参考星的识别跟踪;卫星观测设备对卫星进行识别跟踪;
33.系统获取拍摄触发时刻、触发脉冲间隔和触发脉冲个数,并根据指令完成星图拍摄,根据时统信息锁存拍摄时刻,将观测数据和拍摄时间数据进行误差修正;
34.对修正后的观测数据进行解算,得到各时刻参考星和卫星之间的角距信息,并进一步利用参考星和卫星之间的角距信息解算出卫星相对于测者各时刻在第二赤道坐标系中的赤经值和赤纬值;
35.基于卫星赤经赤纬值连同地球椭球体方程建立方程组,解算出各时刻测者地心惯性坐标系坐标值。
36.在本发明的一个实施例中,还包括:
37.对最终解算得到的测者地心惯性坐标系坐标值进行平滑滤波,以获得更加准确的测者位置信息。
38.在本发明的一个实施例中,所述对修正后的观测数据进行解算,得到各时刻参考星和卫星之间的角距信息,具体解算过程如下:
39.(1)根据球面三角形公式,设参考星为两个自然天体a、b,则a、b两个自然天体的角距为:
[0040][0041]
其中h
′a、h
′b为a、b两个自然天体在观测平台地平坐标系中的伪高度角,a
′a、a
′b为a、b两个自然天体在观测平台地平坐标系中的伪方位角。另外a、b两个自然天体的角距也可通过航天天文历数据库中的赤经赤纬值进行解算:
[0042][0043]
其中,δa、δb为a、b两个自然天体的赤纬值,αa、αb为a、b两个自然天体的赤经值。
[0044]
(2)自然天体a的与卫星s的角距为:
[0045][0046]
其中h
′a、h
′s为自然天体a和卫星s在观测平台地平坐标系中的伪高度角,a
′a、a
′s为自然天体a和卫星s在观测平台地平坐标系中的伪方位角。由于观测平台包含方位和水平基准误差,将观测平台地平坐标系中的方位角和高度角称为伪方位角和伪高度角。
[0047]
(3)自然天体b的与卫星s的角距为:
[0048][0049]
其中h
′b、h
′s为自然天体b和卫星s在观测平台地平坐标系中的高度角,a
′b、a
′s为自然天体b和卫星s在观测平台地平坐标系中的方位角。
[0050]
在本发明的一个实施例中,所述利用参考星和卫星之间的角距信息解算出卫星相对于测者各时刻在第二赤道坐标系中的赤经值和赤纬值,具体解算过程包括:
[0051]
(1)球面角∠pab的求解(p为天北极)
[0052]
根据球面三角形公式
[0053][0054]
其中,
[0055][0056]
(2)球面角∠sab的求解
[0057][0058][0059]
(3)球面角∠pas的求解
[0060]
∠pas=∠pab-∠sab
[0061]
(4)∠aps的求解
[0062][0063][0064]
(5)卫星视赤经αs的求解
[0065]
αs=αa ∠aps
[0066]
(6)卫星视赤纬δs的求解
[0067][0068][0069][0070]
在本发明的一个实施例中,所述各时刻测者地心惯性坐标系坐标值的解算过程如下:
[0071]
(1)求解测者地心惯性坐标系坐标
[0072]
测者坐标满足下列方程组
[0073]
[0074]
其中,x、y、z为测者在地心惯性坐标系中的坐标,x、y、z为卫星在地心惯性坐标系中的坐标,αs、δs为卫星相对于测者的赤经和赤纬值,a为地球椭球体的长轴长度,b为地球椭球体的短轴长度。
[0075]
(2)求解测者经纬度
[0076]
将测者地心惯性坐标系坐标x、y、z,转换成经纬度坐标λ、ф。
[0077]
本发明的一种不依赖水平基准和卫星信号的天文卫星组合导航定位系统及方法,以已知准确空间位置和运动参数的卫星为信标,通过测量卫星在天球上投影点的观测赤经赤纬值来计算观测者位置,可克服传统天文定位观测时机有限、卫星导航易受干扰、惯性导航设备昂贵误差累积等缺点,为舰船提供一种新的抗干扰性强、定位准确、观测时机较多的导航系统,作为现有导航手段的有效补充。
附图说明
[0078]
图1为本发明所述一种不依赖水平基准和卫星信号的天文卫星组合导航定位系统原理示意图;
[0079]
图2为本发明所述一种不依赖水平基准和卫星信号的天文卫星组合导航定位系统原理框图;
[0080]
图3为本发明具体实施方式一的观测控制系统组成图;
[0081]
图4为本发明具体实施方式一的观测系统组成图;
[0082]
图5为本发明具体实施方式一的数据处理系统组成图;
[0083]
图6为本发明具体实施方式一的系统工作流程图;
[0084]
图7为天球坐标及数据解算过程示意图。
实施例
[0085]
本实施例的一种不依赖水平基准和卫星信号的天文卫星组合导航定位系统,如图2至图6所示,所述系统主要包括观测系统、观测控制系统和数据处理系统;所述系统所接收的数据包括舰船航向姿态信息、舰船推算舰位、时统信息和卫星轨道数据;
[0086]
所述观测系统主要用于对自然天体和卫星的观测,包括搭载于舰艇上的地平空间稳定观测平台,以及固定于地平空间稳定观测平台上的恒星观测设备和卫星观测设备。
[0087]
所述地平空间稳定观测平台通过地平伺服系统固定于舰船平台上,地平伺服系统通过观测控制系统发送的舰艇航向姿态信息控制地平空间稳定观测平台到达水平稳定状态。
[0088]
所述恒星观测设备通过恒星观测伺服系统固定于地平空间稳定观测平台,根据观测控制系统所发送的方位角和高度角将恒星观测设备指向预定空间角度,对预定恒星进行搜索识别。
[0089]
所述卫星观测设备通过卫星观测伺服系统固定于地平空间稳定观测平台台,根据观测控制系统发送的方位角和高度角将卫星观测设备指向预定空间角度,对预定卫星进行搜索识别。
[0090]
所述恒星观测设备和卫星观测设备可以是光学设备,也可以是红外或者射电探测设备,可设置一组或者多组。为保证卫星观测能力,在使用光学手段时,应采用高倍率的天
文望远镜。
[0091]
所述观测控制系统主要用于控制观测系统和天体识别解算,包括观测控制模块、恒星识别解算模块和卫星识别解算模块。
[0092]
所述观测控制模块包括控制数据计算模块和拍摄控制模块。所述控制数据计算模块主要用于计算选用恒星和卫星的方位和高度,并连同舰船航向姿态信息一起发送给观测系统,用于稳定地平空间稳定观测平台和为观测设备提供观测引导数据。拍摄控制模块用于向观测系统发送拍摄触发时刻、触发脉冲间隔和触发脉冲个数,观测系统根据指令完成星图拍摄,并根据时统信息锁存拍摄时刻。
[0093]
所述恒星识别模块包括星表数据库和星图匹配模块。星表数据库主要用于存储自然天体的位置、运动、星等等数据。星图匹配模块主要用于利用星图匹配算法对星敏感器或其他观测设备拍摄的星图进行匹配识别,筛选出角距测量参考星。
[0094]
所述卫星识别模块包括卫星数据库和卫星识别模块。卫星数据库模块用于存储所有在轨卫星的相关数据,并可通过通信系统对卫星数据进行更新。卫星识别模块首先计算卫星星等、角速度等信息,连同星图匹配模块共同用于卫星识别。
[0095]
所述数据处理系统主要用于测者位置的解算,包括误差修正模块、投影点解算模块和位置解算模块。
[0096]
所述误差修正模块用于对探测数据进行误差修正,包括传感器内部误差修正和外部误差修正。内部误差主要是由于各项参数偏离标称值造成的,并且与传感器的具体结构有关,一般有特定的校正方法。外部误差通常指传感器处于正常工作状态时,除传感器自身以外其他因素产生的误差。内部误差主要包括相机装配误差、热变形误差、像元分辨率等。而外部误差主要包括大气折射和光行差等。
[0097]
所述投影点解算模块包括伪方位高度解算模块、天体角距解算模块和赤经赤纬解算模块。伪方位高度解算模块用于对参考星和卫星在观测平台坐标系的方位和高度进行解算。观测数据虽然经过误差修正,但依然包含观测平台的方位和水平基准误差,因此在观测平台坐标系中测量的方位和高度信息我们称之为伪方位和伪高度。天体角距模块根据参考星和卫星的伪方位和伪高度数据,解算出卫星和参考星的角距,由于同一时刻观测伪方位和伪高度数据包含相同的基准误差,因此求解的天体角距值可以将平台基准误差消除。赤经赤纬解算模块根据卫星和参考星的角距进一步解算出卫星在第二赤道坐标系中的赤经和赤纬。
[0098]
所述位置解算模块用于对测者经纬度信息进行求解,包括实时位置解算模块和平滑滤波模块。实时位置解算模块根据卫星赤经赤纬和卫星实时位置建立视线方程,同地球椭球体方程共同组成方程组,求解该方程组即可求解出测者地心惯性坐标系中的三维坐标,并可转换成经纬度坐标。平滑滤波模块针对实时更新的测者位置坐标,结合实时推算舰位进行平滑滤波,获得更加精确地测者经纬度信息。
[0099]
本实施例的导航定位系统,其工作流程也即定位方法参考图6所示,包括:
[0100]
1、观测控制系统获取舰艇航向及姿态信息,经观测控制模块计算出伺服数据后,发送给观测系统的观测平台模块,观测平台模块的观测平台伺服系统开始工作,控制地平空间稳定观测平台保持水平稳定的状态;
[0101]
2、观测控制系统获取卫星轨道数据,对卫星识别模块的卫星数据库作实时数据更
新;
[0102]
3、观测控制系统分别获取舰艇位置推算数据和时统信息,结合恒星识别模块下的星表数据库和卫星识别模块下的卫星数据库,筛选参考星和卫星,计算参考星和卫星的方位和高度数据,并将其发送至观测系统;
[0103]
4、观测系统接收参考星和卫星的方位和高度数据,恒星观测伺服系统和卫星观测伺服系统分别驱动恒星观测设备和卫星观测设备指向参考星和卫星所在的空间区域;
[0104]
5、恒星观测设备拍摄星图并进行星图匹配,完成参考星识别和跟踪;卫星观测设备对卫星进行搜索,完成卫星的识别和跟踪;
[0105]
6、恒星观测设备和卫星观测设备均完成参考星和卫星的识别和跟踪后,观测控制系统的拍摄控制模块向观测系统发送拍摄触发时刻、触发脉冲间隔和触发脉冲个数;
[0106]
7、观测系统根据指令完成星图拍摄,根据时统信息锁存拍摄时刻,并将观测数据和拍摄时间数据发送给数据处理系统;
[0107]
8、数据处理系统的误差修正模块分别针对观测数据的传感器内部误差和外部误差进行修正;
[0108]
9、伪方位高度解算模块对误差修正后的观测数据进行解算,根据伪地平坐标值解算得到各时刻参考星和卫星三者之间的角距信息;
[0109]
解算过程包括:
[0110]
(1)根据球面三角形公式,设参考星为两个自然天体a、b,则两个自然天体a、b之间的角距为:
[0111][0112]
其中h
′a、h
′b为a、b两个自然天体在观测平台地平坐标系中的伪高度角,a
′a、a
′b为a、b两个自然天体在观测平台地平坐标系中的伪方位角。另外a、b两个自然天体的角距也可通过航天天文历数据库中的赤经赤纬值进行解算:
[0113][0114]
其中,δa、δb为a、b两个自然天体的赤纬值,αa、αb为a、b两个自然天体的赤经值。
[0115]
(2)自然天体a与卫星s的角距为:
[0116][0117]
其中h
′a、h
′s为自然天体a和卫星s在观测平台地平坐标系中的伪高度角,a
′a、a
′s为自然天体a和卫星s在观测平台地平坐标系中的伪方位角。由于观测平台包含方位和水平基准误差,将观测平台地平坐标系中的方位角和高度角称为伪方位角和伪高度角。
[0118]
(3)自然天体b与卫星s的角距为:
[0119][0120]
其中h
′b、h
′s为自然天体b和卫星s在观测平台地平坐标系中的高度角,a
′b、a
′s为自然天体b和卫星s在观测平台地平坐标系中的方位角。
[0121]
10、赤经赤纬模块利用参考星和卫星之间的角距信息解算卫星相对于测者各时刻在第二赤道坐标系中的赤经值和赤纬值;
[0122]
解算过程为:
[0123]
(1)球面角∠pab的求解(p为天北极)
[0124]
根据球面三角形公式
[0125][0126]
其中,
[0127][0128]
(2)球面角∠sab的求解
[0129][0130][0131]
(3)球面角∠pas的求解
[0132]
∠pas=∠pab-∠sab
[0133]
(4)∠aps的求解
[0134][0135][0136]
(5)卫星视赤经αs的求解
[0137]
αs=αa ∠aps
[0138]
(6)卫星视赤纬δs的求解
[0139][0140][0141][0142]
11、位置解算模块接收卫星赤经赤纬值,连同地球椭球体方程建立方程组,解算各时刻测者地心惯性坐标系坐标值;
[0143]
解算过程为:
[0144]
(1)求解测者地心惯性坐标系坐标
[0145]
测者坐标满足下列方程组
[0146][0147]
其中,x、y、z为测者在地心惯性坐标系中的坐标,x、y、z为卫星在地心惯性坐标系中的坐标,αs、δs为卫星相对于测者的赤经和赤纬值,a为地球椭球体的长轴长度,b为地球椭球体的短轴长度。
[0148]
(3)求解测者经纬度
[0149]
将测者地心惯性坐标系坐标x、y、z,转换成经纬度坐标λ、ф。
[0150]
12、平滑滤波模块对各时刻测者位置进行平滑滤波,获取更加准确的测者位置信息。
[0151]
本发明的有益效果:
[0152]
1.突破传统天文定位理论,消除方向和水平基准误差。传统天文定位理论需依赖方向或水平基准获取天体的方位和高度信息,其中的方向和水平基准误差无法消除,导致定位精度较差。本发明依据的观测量为卫星与其他天体的角距,不包含方向和水平基准误差,因此可大大提高定位精度。
[0153]
2.可发展不依赖水平基准平台的观测方法。本发明虽依然采用水平基准平台进行观测,但仅仅是为了完成对天体的搜索,对平台的误差要求大大降低。后续可发展无需稳定观测平台的星图匹配算法,不依赖方位和高度角信息完成星图匹配,直接测量卫星和参考星之间的角距,从而完成定位。现有的天文自动导航设备均需惯导提供稳定观测平台,而惯导设备价格高昂,如能脱离水平基准平台完成探测和定位,可大大降低系统成本。
[0154]
3.具有较强的抗干扰性。如卫星数据库中的卫星轨道数据比较准确,可完全不依赖外界信息自主的完成定位。如卫星数据不准确,则需要基地向舰船发送卫星轨道更新数据,而舰艇各种通信手段的综合抗干扰性要远远强于卫星导航。
[0155]
4.定位精度较高。本发明完全不受水平和方位基准误差的影响,且光学等探测手段测角精度较高,因此相对于现有的天文自动导航设备具有更高的定位精度。
[0156]
5.可实现全时段连续定位。由于可利用卫星数量较多,且综合使用光学、红外、射电等探测手段,在天气良好的情况下可以实现全时段连续定位。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。