1.本发明属工程机械技术范围,具体地说是一种工程施工中对坚硬物体进行锯切的绳锯车设备。
背景技术:
2.绳锯切割作为一种施工工艺,被广泛的应用在建筑破拆、石材切割等工程领域。现有的绳锯机都是采用铺设轨道的方式进行工作。有一部分具有行走功能,但是其前部导向轮并不能完成任意方向切割面的切割工作。施工的时候还是需要根据实际情况搭设导向轮架。为了避免复杂的人工操作,提高切割效率,有必要提出一种带自动导向臂和更多传感器的智能绳锯车。使得工程施工中的绳锯切割实现机械化、智能化,减少人工并且更加安全高效的完成现代锯切施工的工作。
技术实现要素:
3.本发明是为解决上述问题而提出的,其目的在于提高绳锯切割作业的自动化和智能化。为了实现上述目的,本发明是由以下部分组成:主机架、行走支撑模块、绳锯机系统、液压模块、蓄电池、互联网系统、卫星定位系统、传感器系统、人机交互系统、控制系统。所述主机架为框架结构,上面设置主机箱、防护罩。所述行走支撑模块与控制系统连接,包括:行走机构、支撑机构。所述行走机构安装在主机架上,包括:车轮、车轮驱动马达、转向系统。所述车轮与车轮驱动马达和转向系统连接。所述车轮驱动马达包括液压马达和电动机。所述行走机构包括并不限于轮式、履带式、腿式、轮腿式。所述支撑机构分布在主机架的周围,包括并不限于螺旋结构和液压结构。所述支撑机构与主机架的连接为活动连接。所述活动连接上设置弹簧。所述支撑机构可以在活动连接处收回到主机架内。
4.所述绳锯机系统包括主驱动马达、主驱动轮、锯绳张紧感测机构、储绳系统、自动导向臂机构。所述绳锯机系统与控制系统连接。所述主驱动马达设置在主机箱内,所述主驱动马达的动力机构包括一切机械动力源。所述主驱动轮与主驱动马达连接,所述主驱动轮上设置绳槽。所述主驱动轮上的绳槽有两种情况:
①
有一个绳槽;
②
有一个以上非一致绳槽。所述锯绳张紧感测机构包括:导向轮活动支架、两个导向轮、弹簧、电位计。所述储绳系统包括:两个锯绳缠绕轮组、小车。所述每一个锯绳缠绕轮组上设置n个(其中n≥1)导向轮。所述锯绳缠绕轮组的设置有两种情况:
①
其中一个锯绳缠绕轮组设置在主机架的一端,另外一个锯绳缠绕轮组设置在小车上;
②
两个锯绳缠绕轮组分别设置在两个小车上。所述小车上设置小车行走机构,所述小车行走机构包括:行走轨道、小车驱动机构、小车驱动马达、减速机。所述行走轨道包括并不限于轮式、滑轨式、轮式 滑轨式。所述小车驱动机构的驱动形式包括并不限于齿轮齿条驱动、丝杠驱动、液压油缸驱动、链条链轮驱动。所述小车驱动马达包括并不限于液压马达、电动机。所述自动导向臂机构包括:摆臂驱动箱、进绳导向臂、出绳导向臂。所述摆臂驱动箱设置在主机架的一端。所述摆臂驱动箱内设置有驱动马达、减速机构、传动机构。所述摆臂驱动箱内的驱动马达包括液压马达、电动机。所述摆臂驱动箱
内的传动机构分别连接进绳导向臂和出绳导向臂,并且分别控制进绳导向臂和出绳导向臂做360
°
摆臂运动。所述进绳导向臂设置在摆臂驱动箱上,包括:三个导向轮、导向轮支架、导向轮支架转向机构、导向轮支架伸缩机构、驱动马达及减速机。所述三个导向轮设置在导向轮支架的节点处。所述导向轮支架的节点处设置导向轮支架转向机构。所述导向轮支架上的连接杆上设置导向轮支架伸缩机构和导向轮支架转向机构。所述出绳导向臂设置在摆臂驱动箱上,包括:二个导向轮、一个动力输出轮、导向轮支架、导向轮支架转向机构、导向轮支架伸缩机构、驱动马达及减速机。所述两个导向轮设置在导向轮支架的节点处 。所述动力输出轮设置在导向轮支架的末端。所述导向轮支架上的节点处设置导向轮支架转向机构。所述导向轮支架上的连接杆上设置导向轮支架伸缩机构和导向轮支架转向机构。所述动力输出轮包括轮架、轮架转向装置、轮体、压轮、弹簧、驱动马达。所述动力输出轮内设置棘轮装置。所述自动导向臂机构上的驱动马达包括并不限于液压马达、电动机。
5.所述液压模块为完整的液压系统,与控制系统连接。所述液压模块设置在主机架内,为其它系统提供动力支持。所述蓄电池设置在主机架内,为本发明提供备用电力支持。所述互联网系统为控制系统与工业互联网的连接装置,包括无线连接和有线连接。所述互联网系统设置在主机箱内。所述卫星定位系统为控制系统与全球卫星定位系统的连接,设置在主机箱内。所述传感器系统与控制系统连接。所述传感器系统包括:摄像装置、语音识别装置、照明装置、测距雷达、压力传感器、激光水平仪。所述测距雷达为分布式安装,包括并不限于电磁波、超声波。所述人机交互系统为独立的控制面板,与控制系统连接。所述独立的控制面板包括:旋钮、按钮、摇杆、触摸屏、声控系统、扬声器、遥控装置。所述控制系统设置在主机箱内,包括:plc、plc与各个系统的连接线路、遥控装置、各个系统配置的电气设备。
6.本发明是对硬物进行绳锯切割的设备。其优点是通过本发明的自动导向臂机构,可以方便的调整导向轮的方向,适应各种不同锯切状态。最大限度的简化操作流程,减少人力付出。本发明锯切过程中把不断增长的锯绳储存在储绳系统中,避免了不断剪绳接绳的工序。本发明在锯切过程中与被切割物体始终保持短距状态,使锯切更稳定,同时也更安全高效。本发明通过互联网系统和传感器系统,实现了远程通讯,更加自动化、智能化。
附图说明
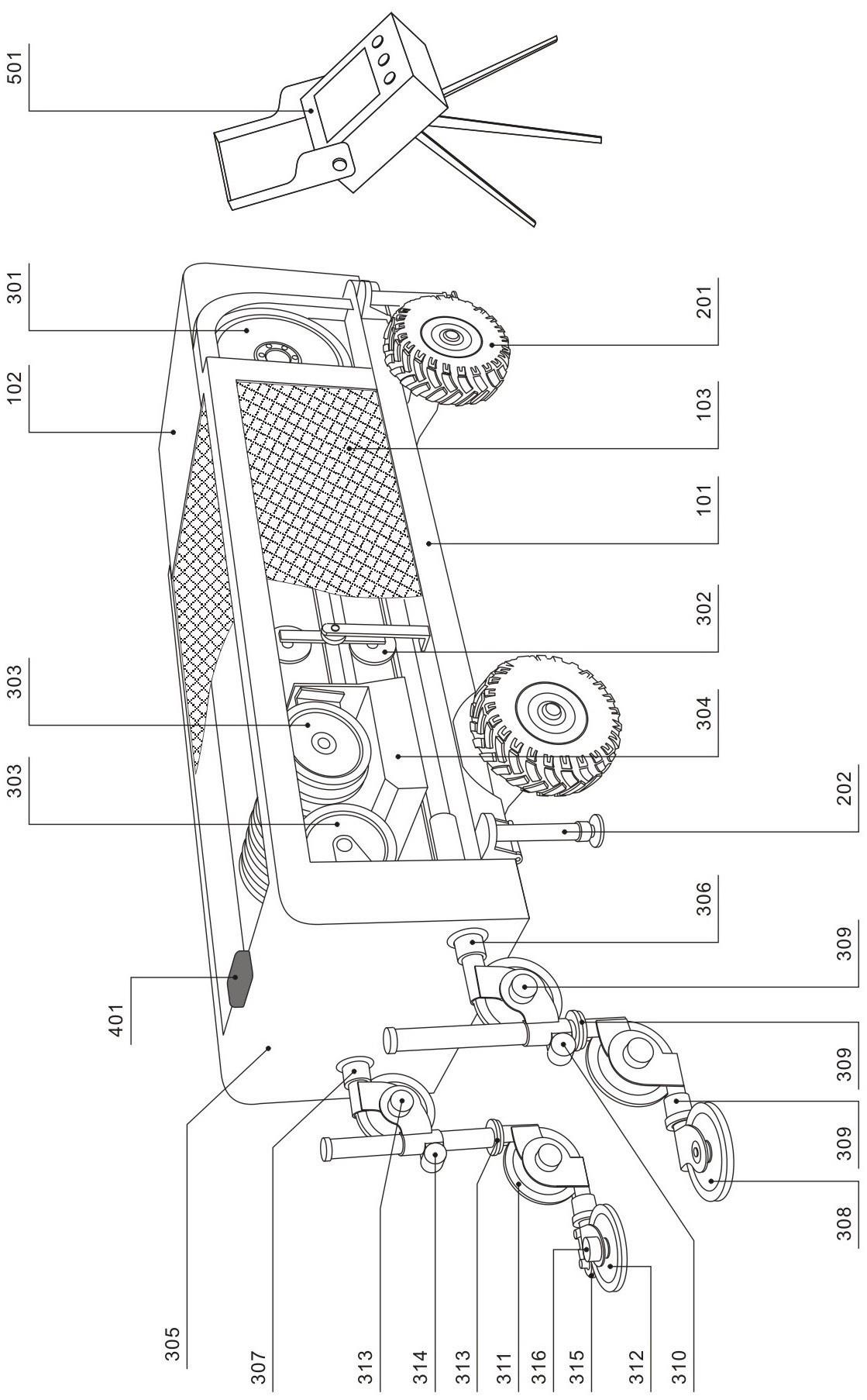
7.图1是本发明的立体示意图。
8.图2是本发明的侧视图。
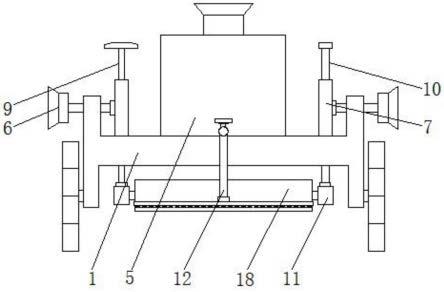
9.图3是本发明的前视图。
具体实施方式
10.以下将结合说明书附图对本发明做进一步详细说明。根据图1、图2、图3所示,本发明由以下部分组成:主机架101、行走支撑模块、绳锯机系统、液压模块、蓄电池、互联网系统、卫星定位系统、传感器系统401、人机交互系统、控制系统。所述主机架101为框架结构,上面设置主机箱102、防护罩103。所述行走支撑模块与控制系统连接,包括:行走机构201、支撑机构202。所述行走机构201安装在主机架101上,包括:车轮、车轮驱动马达、转向系统。所述车轮与车轮驱动马达和转向系统连接。所述车轮驱动马达包括液压马达和电动机。所
述行走机构201包括并不限于轮式、履带式、腿式、轮腿式。所述支撑机构202分布在主机架的周围,包括并不限于螺旋结构和液压结构。所述支撑机构202与主机架101的连接为活动连接。所述活动连接上设置弹簧。所述支撑机构202可以在活动连接处收回到主机架101内。
11.所述绳锯机系统包括主驱动马达、主驱动轮301、锯绳张紧感测机构302、储绳系统、自动导向臂机构。所述绳锯机系统与控制系统连接。所述主驱动马达设置在主机箱102内,所述主驱动马达的动力机构包括一切机械动力源。所述主驱动轮301与主驱动马达连接,所述主驱动轮301上设置绳槽。所述主驱动轮301上的绳槽有两种情况:
①
有一个绳槽;
②
有一个以上非一致绳槽。所述锯绳张紧感测机构302包括:导向轮活动支架、两个导向轮、弹簧、电位计。所述储绳系统包括:两个锯绳缠绕轮组303、小车304。所述每一个锯绳缠绕轮组303上设置n个(其中n≥1)导向轮。所述锯绳缠绕轮组303的设置有两种情况:
①
其中一个锯绳缠绕轮组303设置在主机架的一端,另外一个锯绳缠绕轮组303设置在小车上;
②
两个锯绳缠绕轮组303分别设置在两个小车304上。所述小车304上设置小车行走机构,所述小车行走机构包括:行走轨道、小车驱动机构、小车驱动马达、减速机。所述行走轨道包括并不限于轮式、滑轨式、轮式 滑轨式。所述小车驱动机构的驱动形式包括并不限于齿轮齿条驱动、丝杠驱动、液压油缸驱动、链条链轮驱动。所述小车驱动马达包括并不限于液压马达、电动机。所述自动导向臂机构包括:摆臂驱动箱305、进绳导向臂306、出绳导向臂307。所述摆臂驱动箱305设置在主机架的一端。所述摆臂驱动箱305内设置有驱动马达、减速机构、传动机构。所述摆臂驱动箱305内的驱动马达包括液压马达、电动机。所述摆臂驱动箱305内的传动机构分别连接进绳导向臂306和出绳导向臂307,并且分别控制进绳导向臂和出绳导向臂做360
°
摆臂运动。所述进绳导向臂306设置在摆臂驱动箱305上,包括:三个导向轮308、导向轮支架、导向轮支架转向机构309、导向轮支架伸缩机构310、驱动马达及减速机。所述三个导向轮308设置在导向轮支架的节点处。所述导向轮支架的节点处设置导向轮支架转向机构309。所述导向轮支架上的连接杆上设置导向轮支架伸缩机构310和导向轮支架转向机构309。所述出绳导向臂307设置在摆臂驱动箱305上,包括:二个导向轮311、一个动力输出轮312、导向轮支架、导向轮支架转向机构313、导向轮支架伸缩机构314、驱动马达及减速机。所述两个导向轮311设置在导向轮支架的节点处 。所述动力输出轮312设置在导向轮支架的末端。所述导向轮支架上的节点处设置导向轮支架转向机构313。所述导向轮支架上的连接杆上设置导向轮支架伸缩机构314和导向轮支架转向机构313。所述动力输出轮312包括:轮架、轮架转向装置、轮体、压轮315、弹簧、驱动马达316。所述动力输出轮312内设置棘轮装置。所述自动导向臂机构上的驱动马达包括并不限于液压马达、电动机。
12.所述液压模块为完整的液压系统,与控制系统连接。所述液压模块设置在主机架101内,为其它系统提供动力支持。所述蓄电池设置在主机架101内,为本发明提供备用电力支持。所述互联网系统为控制系统与工业互联网的连接装置,包括无线连接和有线连接。所述互联网系统设置在主机箱102内。所述卫星定位系统为控制系统与全球卫星定位系统的连接,设置在主机箱102内。所述传感器系统401与控制系统连接。所述传感器系统401包括:摄像装置、语音识别装置、照明装置、测距雷达、压力传感器、激光水平仪。所述测距雷达为分布式安装,包括并不限于电磁波、超声波。所述人机交互系统为独立的控制面板501,与控制系统连接。所述独立的控制面板501包括:旋钮、按钮、摇杆、触摸屏、声控系统、
扬声器、遥控装置。所述控制系统设置在主机箱102内,包括:plc、plc与各个系统的连接线路、遥控装置、各个系统配置的电气设备。
13.在施工现场,启动本发明的控制系统,通过卫星定位系统和传感器系统401可以自行就位到需要的工作面。伸出支撑机构202,使主机架101达到平衡状态。通过控制面板501把锯绳自动导向臂机构调整到切割面的合适位置。把锯绳穿过进绳导向臂306,主驱动轮301,再经过锯绳张紧感测机构302后,交替绕过两个锯绳缠绕轮组303,最后经过出绳导向臂307,从动力输出轮312中导出,绕过切割目标,按正常程序连接锯绳即可开始切割作业。由于本发明是把锯切过程中逐渐拉长的锯绳储存在储绳系统中,所以省去了人工剪绳和接绳的工序。锯切过程中本发明和被切割物体的距离始终保持短距状态,防止绳子抖动,保证锯切过程的稳定一致。减少人工干预的同时提高了锯切的施工效率。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。