1.本实用新型属于医学教学领域的技术领域,具体涉及一种手术器械模拟器。
背景技术:
2.传统虚拟现实技术通过双目视差来产生人类的深度感知,可以用于模拟人体在日常环境中的立体视觉,在各行各业中以得到了广泛应用。随着vr技术的不断推广和发展,仅有视觉模拟的虚拟现实技术已日渐无法满足许多专业应用邻域的需求。例如在医学临床手术操作教学系统中,医学生不仅需要学习关于手术操作的知识点,同时还需要能对手术过程进行实际操作,对切割、缝合、穿刺、注射等各类临床手术操作的力度、精度、手法进行切身体验。为了满足这一需求,当今vr技术界正在向视觉与力触觉向结合的多模态虚拟现实领域发展。
3.在vr系统中,力触觉的传递需要依靠实体机械进行驱动,所以通常使用使用随动型机械臂来作为力触觉模拟设备。
4.但在现有技术中,由于手术器械种类的多样型,单一的随动型机械臂无法模拟多种手术器械,导致在使用包含力触觉模拟的vr系统时,针对手术器械种类的不同,需要更换不同的机械臂,这使得操作起来十分繁琐。
技术实现要素:
5.基于此,本实用新型的目的是提供一种手术器械模拟器,设置持握部与连接组件用于模拟现实手术器械,通过连接组件将持握部连接在随动机械臂上,用于解决现有技术中单一的随动型机械臂无法模拟多种手术器械,导致在使用包含力触觉模拟的vr系统时,针对手术器械种类的不同,需要更换不同的机械臂,这使得操作起来十分繁琐的技术问题。
6.本实用新型提出的手术器械模拟器,应用于随动机械臂上,包括持握部、以及将所述持握部设于所述随动机械臂上的连接组件;
7.所述连接组件包括外壳、设于所述外壳内部的反馈电路板、以及设于所述外壳一端的连接器,所述外壳的另一端与所述持握部连接,使得所述持握部与所述连接组件形成一体结构;
8.所述连接器包括电气触点,通过所述电气触点插接在所述随动机械臂上,以使得所述持握部可驱动所述随动机械臂。
9.进一步的,所述连接器还包括磁铁,所述电气触点设于所述磁铁远离所述持握部一端。
10.进一步的,所述磁铁是圆环磁铁,且为径向充磁。
11.进一步的,所述连接组件还包括反馈电板路,所述反馈电板路设于所述外壳内部且位于所述持握部与所述连接器之间,所述反馈电路的内部通讯指令中包含器具类型数据。
12.进一步的,所述反馈电路板通过所述连接器与所述随动机械臂电性连接。
13.进一步的,所述手术器械模拟器为手术刀模拟器,包括手术刀刀柄和手术刀刀身,所述持握部为手术刀刀柄,所述外壳为手术刀刀身。
14.进一步的,所述手术器械模拟器为喉镜模拟器,包括握把和镜片,所述持握部为握把,所述外壳为镜片。
15.进一步的,所述手术器械模拟器为穿刺针模拟器,包括针柄和针头,所述持握部为针柄,所述外壳为针头。
16.上述手术器械模拟装置,通过连接组件将持握部连接在随动机械臂上,替换了传统方案中针对模拟不同手术器械时,需直接更换不同的随动型机械臂的技术方案。具体的,包括持握部、以及将持握部设于随动机械臂上的连接组件,连接组件包括外壳、设于外壳内部的反馈电路板、以及设于外壳一端的连接器,外壳的另一端与持握部连接,使得持握部与连接组件形成一体结构,连接器包括电气触点,通过电气触点插接在随动机械臂上,以使得持握部可驱动随动机械臂。解决现有技术中由于单一的随动型机械臂无法模拟多种手术器械,导致在使用包含力触觉模拟的vr系统时,针对手术器械种类的不同,需要更换不同的机械臂,这使得操作起来十分繁琐的技术问题。
附图说明
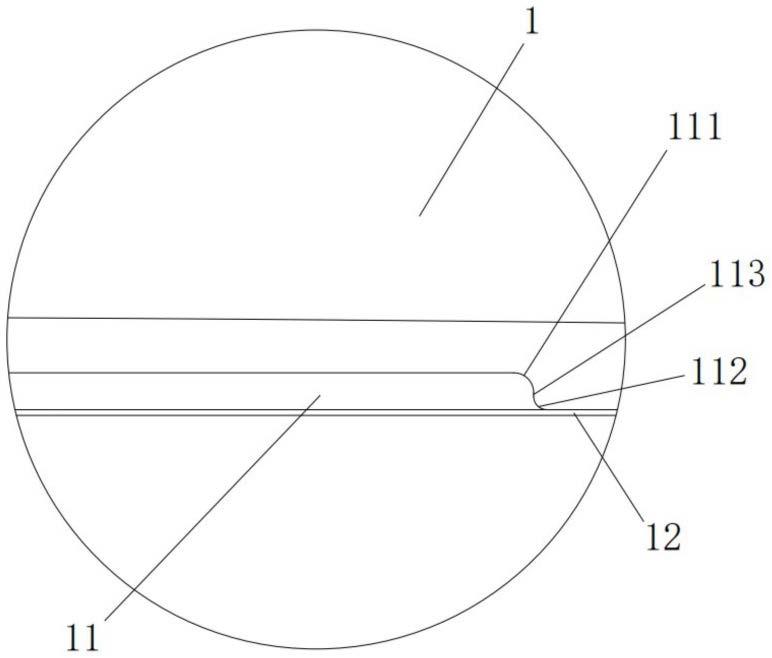
17.图1为本实用新型的结构示意图;
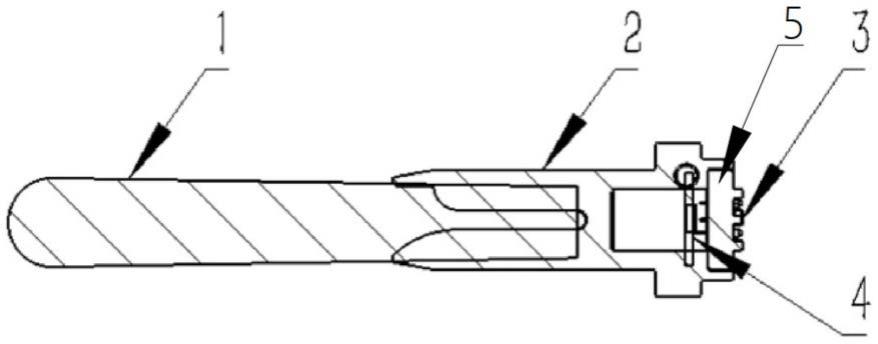
18.图2为本实用新型实施例一与现实中手术刀的结构对比图;
19.图3为本实用新型实施例二与现实中喉镜的结构对比图;
20.图4为本实用新型实施例三与现实中穿刺针的结构对比图。
21.主要元件符号说明:
22.持握部1外壳2电气触点3反馈电路板4磁铁5
ꢀꢀ
23.以下具体实施方式将结合上述附图进一步说明本实用新型。
具体实施方式
24.为了便于理解本实用新型,下面将参照相关附图对本实用新型进行更全面的描述。附图中给出了本实用新型的若干实施例。但是,本实用新型可以以许多不同的形式来实现,并不限于本文所描述的实施例。相反地,提供这些实施例的目的是使对本实用新型的公开内容更加透彻全面。
25.需要说明的是,当元件被称为“固设于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
26.除非另有定义,本文所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常理解的含义相同。本文中在本实用新型的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本实用新型。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
27.请参阅图1,所示为本实用新型的手术器械模拟器的基本结构示意图,包括持握部1、以及与持握部1相连的连接组件。
28.连接组件包括外壳2、设于外壳2内部的反馈电路板4、以及设于外壳2一端的连接器,外壳2的另一端与持握部1连接,使得持握部1与连接组件形成一体结构。
29.反馈电板路4设于持握部1与连接器之间,反馈电路板4的内部通讯指令中包含器具类型数据,当连接器插接在随动机械臂(图未示)上时,上位系统通过读取反馈电板路4内的器具类型数据以便于辨别模拟器类型。
30.连接器包括磁铁5、以及设于磁铁5远离持握部1一端的电气触点3,磁铁5为圆环磁铁,且为径向充磁,在将电气触点3插接在随动机械臂上时,在径向磁场的作用下,手术器械模拟器可以与随动机械臂自动转正吸合,保证连接器内的电气触点3与随动机械臂内部电路准确连接,使得上位系统能顺利读取反馈电板路4内的器具类型数据以便于辨别模拟器类型。
31.上述手术器械模拟装置,通过连接组件将持握部连接在随动机械臂上,替换了传统方案中针对模拟不同手术器械时,需直接更换不同的随动型机械臂的技术方案。具体的,包括持握部、以及将持握部设于随动机械臂上的连接组件,连接组件包括外壳、设于外壳内部的反馈电路板、以及设于外壳一端的连接器,外壳的另一端与持握部连接,使得持握部与连接组件形成一体结构,连接器包括电气触点,通过电气触点插接在随动机械臂上,以使得持握部可驱动随动机械臂。解决现有技术中由于单一的随动型机械臂无法模拟多种手术器械,导致在使用包含力触觉模拟的vr系统时,针对手术器械种类的不同,需要更换不同的机械臂,这使得操作起来十分繁琐的技术问题。
32.实施例一
33.请参阅图2,所示为本实用新型的第一实施例中的手术器械模拟器:手术器械模拟器为手术刀模拟器,持握部1为手术刀刀柄,外壳为手术刀刀身,且手术刀刀身的长度相比于标准的手术刀刀身而言短10-30mm,由于上位系统计算力接触点的距离是在电气触点3的基础上再加10-30mm,使得手术刀模拟器的力作用长度恰好和真实手术刀长度相等,即手术刀模拟器在虚拟仿真环境中有着与真实手术刀一样触觉效果。
34.实施例二
35.请参阅图3,所示为本实用新型的第二实施例中的手术器械模拟器,本实施例与上述第一实施例的不同之处在于:手术器械模拟器为喉镜模拟器,包括握把和镜片,持握部1为握把,外壳为镜片,镜片的长度相比于标准的喉镜而言短10-30mm,由于上位系统计算力接触点的距离是在电气触点3的基础上再加10-30mm,使得喉镜模拟器的力作用长度恰好和真实喉镜长度相等,即喉镜模拟器在虚拟仿真环境中有着与真实喉镜一样触觉效果。
36.实施例三
37.请参阅图4,所示为本实用新型的第三实施例中的手术器械模拟器,本实施例与上述第一实施例的不同之处在于:手术器械模拟器为穿刺针模拟器,包括针柄和针头,持握部1为针柄,外壳为为针头,针头的长度相比于标准的穿刺针的针头而言短10-30mm,由于上位系统计算力接触点的距离是在电气触点3的基础上再加10-30mm,使得穿刺针模拟器的力作用长度恰好和真实穿刺针长度相等,即穿刺针模拟器在虚拟仿真环境中有着与真实喉镜一样触觉效果。
38.综上,当学习人员需要学习某种手术器械时,只需将该种手术器械模拟器插接在随动机械臂上,也就是通过电气触电3,使得反馈电板路4与随动机械臂内部电路电性连接,使得vr系统,也就是上位系统能顺利读取反馈电板路4内的器具类型数据以便于辨别模拟器类型,使得vr系统内部模拟出该种手术器械的具体形状,且该种手术器械模拟器中的持握部1与连接组件均是模拟现实的手术器械,从而学习人员通过操作持握部1来驱动随动机械臂进行工作,达到在vr系统模拟现实器械工作的效果。
39.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本实用新型的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
40.以上实施例仅表达了本实用新型的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。因此,本实用新型专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。