1.本发明涉及机械臂技术领域,具体为一种双关节机械臂的预定时间控制器的设计方法。
背景技术:
2.机械臂是制造业的重要组成部分,在汽车,军事、医疗等领域起着至关重要的作用。现在的对于机械臂的研究方法中,提出了许多控制方法。
3.在解决机械臂位置快速跟踪问题上,先后提出了有限时间控制和固定时间控制。虽然有限时间控制方法可以使得系统的收敛时间有界,但是其收敛时间与系统的初值有关,保证不了收敛时间对于状态的一致性;固定时间控制方法虽然可以保证收敛时间与状态的一致性,但是其难以保证收敛时间对于参数的一致性。
技术实现要素:
4.本发明目的在于提供一种双关节机械臂的预定时间控制器的设计方法,现解决现有技术中存在以下问题,有限时间控制方法可以使得系统的收敛时间有界,但是其收敛时间与系统的初值有关,保证不了收敛时间对于状态的一致性;固定时间控制方法虽然可以保证收敛时间与状态的一致性,但是其难以保证收敛时间对于参数的一致性,本发明克服了上述问题,本发明不仅可以保证系统的收敛时间的状态一致性和参数一致性;同时在所提出的预定时间控制器中,系统的收敛时间是控制器中的一个参数,因此可以直接通过该参数设定并调节系统的收敛时间。
5.为实现上述目的,本发明提供如下技术方案:
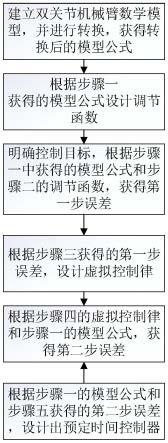
6.一种双关节机械臂的预定时间控制器的设计方法,包括以下步骤:
7.s1:建立双关节机械臂数学模型,并进行转换,获得转换后的模型公式;
8.s2:根据s1获得的模型公式,设计调节函数;
9.s3:明确控制目标,根据s1中获得的模型公式和s2的调节函数,获得第一步误差;
10.s4:根据s3获得的第一步误差,设计虚拟控制律;
11.s5:根据s4的虚拟控制律和s1的模型公式,获得第二步误差;
12.s6:根据s1的模型公式和s5获得的第二步误差,设计出预定时间控制器。
13.s1中建立的双关节机械臂数学模型为:
[0014][0015]
其中,q为机械臂的实际角位置;为机械臂的角速度;为机械臂的角加速度,m(q)为机械臂的转动惯矩阵量;为机械臂的离心力和哥氏力的矩阵;g(q)代表机械臂的重力项;u代表将要设计的预定时间控制器,d(t)为随时间变化的机械臂的不确定干扰。
[0016]
s1中转化后的模型公式为:
[0017]
[0018][0019]
其中q1=q,q2为机械臂的角速度,为机械臂的角加速度,c为转化后机械臂的离心力和哥氏力的矩阵,g为机械臂的重力项,d为机械臂的不确定干扰。
[0020]
s2中调节函数设计公式为:
[0021][0022]
其中μ
i t,t为调解函数,m0和m1初始常向量,角标i表示向量的第i个分量,t为机械臂运转时间,t为收敛时间的设定值。
[0023]
第一步误差的获取基于反步控制原理。
[0024]
s3中第一步误差为:
[0025]
z1=q
1-q
d-μ(t,t)
[0026]
其中,z1为第一步误差,q1为机械臂的实际角位置,qd为目标跟踪轨迹,t为收敛时间的设定值,μ(t,t)为时变调节函数向量。
[0027]
s4虚拟控制律的设置方法为:
[0028][0029]
其中,α为虚拟控制律,c1为控制参数,z1为第一步误差,为目标跟踪轨迹的一阶导,为时变调节函数向量的一阶导。
[0030]
s5中第二步误差为:
[0031]
z2=q
2-α
[0032]
其中,α为虚拟控制律,z2为第二步误差,q2为机械臂角速度。
[0033]
s6中预定时间控制器的设计方法为:
[0034][0035]
其中,u为预定时间控制器,c2为控制参数,z2为第二步误差,c为机械臂的离心力和哥氏力的矩阵,q2为机械臂的角速度,g为机械臂的重力项,d为已知常数,tanh(
·
)为双曲正切函数,κ=0.2785,κ1为常数,ε为最终收敛误差的上界控制参数,z1为第一步误差,m为机械臂的转动惯矩阵量,为虚拟控制律的一阶导。
[0036]
所述s4和s6结束后均采用李雅普诺夫函数进行稳定性分析。
[0037]
与现有技术相比,本发明具有以下有益效果:本发明提供了一种双关节机械臂的预定时间控制器的设计方法,基于双关节机械臂数学模型,并基于转换后的模型公式设计调节函数,获取第一步误差,设计虚拟控制律,最后获取第二步误差,设计出预定时间控制
器,本发明不仅可以保证系统的收敛时间的状态一致性和参数一致性;同时在所提出的预定时间控制器中,系统的收敛时间是控制器中的一个参数,因此可以直接通过该参数设定并调节系统的收敛时间。
附图说明
[0038]
图1是本发明一种双关节机械臂的预定时间控制器的设计方法设计流程图;
[0039]
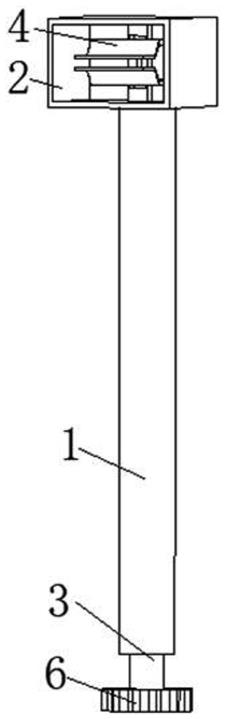
图2是本发明为双关节机械臂结构图;
[0040]
图3是本发明设计的预定时间控制器结构图;
[0041]
图4是本发明双关节机械臂角度跟踪图;
[0042]
图5是本发明双关节机械臂角度跟踪误差图;
[0043]
图6是本发明双关节机械臂角速度图;
[0044]
图7是本发明双关节机械臂控制力矩输入图。
具体实施方式
[0045]
下面结合具体的实施例对本发明做进一步的详细说明,所述是对本发明的解释而不是限定。
[0046]
如图1-7所示,本发明提供了一种双关节机械臂的预定时间控制器的设计方法,
[0047]
为方便描述问题,标记代表实数集合,代表正实数集合,代表非负实数集合;代表n维列向量,代表m行n列的矩阵;λ
min
(a)和λ
max
(a)分别代表有界正定矩阵a的最小特征值和最大特征值;对于矢量||x||1=[|x1|,|x2|,
…
,|xn|]
t
代表向量的1-范数,代表的向量的欧几里得范数,||a||代表矩阵的欧几里得范数。
[0048]
全局预定时间有界定义:
[0049]
对于非线性系统
[0050][0051]
式中为系统状态,td为已知的系统参数,为非线性函数,其关于t分段连续,关于x局部李普希兹连续。上述系统的解的轨迹可表示为x(t,x0,td),x0=x(0,x0,td)表示系统初值。
[0052]
则全局预定时间有界定义可以给出为:
[0053]
对于系统(1),若存在任意一个常数使得系统由任意初值出发的轨迹x(t,x0,td)在td时刻之后始终满足||x(t,x0,td)||≤δ,那么称系统(1)的解是预定时间全局有界。
[0054]
系统(1)可以等价为控制系统:
[0055][0056]
苴中u=u(x,t,td)为控制向量,且将u(x,t,td)带入(2)中,可以得到f(x,t,td)=g(x,u(x,t,td))。
[0057]
不失一般性,双关节机械臂的模型可以描述为:
[0058][0059]
式中为机械臂的实际角位置,q=[q1,q2]
t
;为机械臂的角速度;为机械臂的角加速度。为机械臂的转动惯量矩阵;为机械臂的离心力和哥氏力的矩阵;代表机械臂的重力项;代表机械臂的关节控制力矩,为机械臂的不确定干扰。
[0060]
性质1:惯性矩阵m(q)是正定矩阵,对称且有界,即
[0061]
0<λ
min
(m)≤||m(q)||≤λ
max
(m)
ꢀꢀ
(4)
[0062]
性质2:哥氏力和离心力的矩阵满足如下关系:
[0063][0064][0065]
其中c
min
和c
max
为未知的正常数。
[0066]
性质3:为反对称矩阵,即
[0067][0068]
引理1:对于下列不等式恒成立
[0069][0070]
式中κ=0.2785。
[0071]
假设1:机械臂的不确定干扰d(t)是有界的。即存在已知的常数d1,有||d(t)||≤d1恒成立。
[0072]
假设2:系统的目标跟踪轨迹qd(t)连续且二阶可导,并且qd(t)及其导数均为已知函数。
[0073]
令q1=q,系统(3)可转换为严反馈形式
[0074][0075]
误差定义:
[0076][0077]
其中:为虚拟控制律,随后给出;t∈[0, ∞)为系统的参数,代表系统的收敛时间的设定值;为时变调节函数向量,满足以下三个条件:
[0078]
条件一:μ(t,t)关于时间t二阶连续可导。
[0079]
条件二:μ(t,t)=0在t∈[t, ∞]时恒成立。
[0080]
条件三:μ(0,t)和满足
[0081][0082]
式中和为两个常向量,他们与系统的初始值有关。
[0083]
注1,满足条件一至条件三的备选函数有多种,本发明中将采用一个四次多项式作为示例。根据条件一-三,选择的调节函数μi(t,t)(i=1,2)需满足:
[0084]
初值条件:μi(0,t)=m
0i
,
[0085]
终值条件:μi(t,t)=0,
[0086]
通过以上5个等式,可以得到如下的唯一的四次多项式:
[0087][0088]
第一步:
[0089]
考虑误差定义(10),对第一步误差z1进行求导得
[0090][0091]
虚拟控制律设计:
[0092][0093]
式中常数为控制参数。
[0094]
第一步稳定性分析:
[0095]
选择李雅普诺夫函数:
[0096][0097]
对李雅普诺夫函数(14)求导,并带入虚拟控制律(13)可以得到
[0098][0099]
第二步:
[0100]
对第二步误差进行求导,并带入(8)有
[0101][0102]
设计控制率:
[0103][0104]
式中常数为控制参数,常数为控制参数代表最终收敛误差的上界,常数κ1=min{2c1,2c2}。
[0105]
第二步稳定性分析:
[0106]
给出李雅普诺夫函数:
[0107][0108]
对李雅普诺夫函数(18)求导,并带入(15),(16)和(17)可以得到
[0109][0110]
式中tanh(κdz2/κ1ε2)=[tanh(κdz
21
/κ1ε2),tanh(κdz
22
/κ1ε2)]
t
,tanh(
·
)为双曲正切函数。
[0111]
根据引理1可以得到
[0112][0113]
由假设1和(21)可知
[0114][0115]
根据性质3可知
[0116][0117]
因此,将(22)和(23)带入(19)有
[0118][0119]
对微分方程(24)求解可得
[0120][0121]
将条件三中的(10)以及虚拟控制律(13)带入到误差定义(9)中可以得到
[0122][0123]
结合李雅普诺夫函数(18)有v(0)=0,因此由(25)可以进一步得到当t∈[0, ∞)有v(t)≤ε2/2。然后根据条件2:μ(t,t)=0在t∈[t, ∞]恒成立,我们最终可以得到机械臂的跟踪误擦在预定的时间内小于预先设定设定误差界,即
[0124][0125]
为了验证提出方法的有效性,设置仿真如下:
[0126]
系统参数:l1=1m,l2=0.85m,m1=2.04kg,m2=1kg,g=9.8m/s2;
[0127]
p1=(m1 m2)l
12
,p2=m2l
22
,p3=m2l1l2,p4=(m1 m2)l1,p5=m2l2,
[0128][0129][0130][0131][0132]
给定参考信号:qd=[0.5sin(t),0.5sin(t)]
t
。
[0133]
系统初值:q=[0.6,-0.4]
t
,
[0134]
仿真参数:t=10s,c1=20,c2=30,ε=0.001。
[0135]
仿真结果如图3-6所示。图3是系统跟踪曲线,可以看出本发明设计的控制器具有良好的跟踪性能。图4是跟踪误差曲线,此处跟踪误差且e=q-qd,从图中可以看出,设定的时间t=10s的时刻,误差收敛到零附近。图5是系统角加速度曲线,可以看出角加速度收敛性质良好。图6是控制器输入曲线。从图3-6可以看出本发明设计的控制器能
否保证系统在给定的时间内收敛。
[0136]
相较于现有技术,本专利具有如下技术效果:
[0137]
不仅可以保证系统的收敛时间的状态一致性和参数一致性;同时在所提出的预定时间控制器中,系统的收敛时间是控制器中的一个参数,因此可以直接通过该参数设定并调节系统的收敛时间。具体的比较如下表所示:
[0138]
表1预定时间控制器与现有的有限时间控制器和固定时间控制器的优势比较
[0139][0140]
尽管以上结合附图对本发明的实施方案进行了描述,但是本发明并不局限于上述的具体实施方案和应用领域,上述的具体实施方案仅仅是示意性的、指导性的,而不是限制性的。本领域的普通技术人员在说明书的启示下,在不脱离本发明权利要求所保护的范围的情况下,还可以做出很多种的形式,这些均属于本发明保护之列。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。