技术特征:
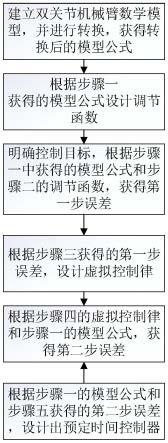
1.一种双关节机械臂的预定时间控制器的设计方法,其特征在于,包括以下步骤:s1:建立双关节机械臂数学模型,并进行转换,获得转换后的模型公式;s2:根据s1获得的模型公式,设计调节函数;s3:明确控制目标,根据s1中获得的模型公式和s2的调节函数,获得第一步误差;s4:根据s3获得的第一步误差,设计虚拟控制律;s5:根据s4的虚拟控制律和s1的模型公式,获得第二步误差;s6:根据s1的模型公式和s5获得的第二步误差,设计出预定时间控制器。2.根据权利要求1所述的一种双关节机械臂的预定时间控制器的设计方法,其特征在于,s1中建立的双关节机械臂数学模型为:其中,q为机械臂的实际角位置;为机械臂的角速度;为机械臂的角加速度,m(q)为机械臂的转动惯矩阵量;为机械臂的离心力和哥氏力的矩阵;g(q)代表机械臂的重力项;u代表将要设计的预定时间控制器,d(t)为随时间变化的机械臂的不确定干扰。3.根据权利要求2所述的一种双关节机械臂的预定时间控制器的设计方法,其特征在于,s1中转化后的模型公式为:于,s1中转化后的模型公式为:其中q1=q,q2为机械臂的角速度,为机械臂的角加速度,c为转化后机械臂的离心力和哥氏力的矩阵,g为机械臂的重力项,d为机械臂的不确定干扰。4.根据权利要求1所述的一种双关节机械臂的预定时间控制器的设计方法,其特征在于,s2中调节函数设计公式为:其中μ
i
t,t为调解函数,m0和m1初始常向量,角标i表示向量的第i个分量,t为机械臂运转时间,t为收敛时间的设定值。5.根据权利要求1所述的一种双关节机械臂的预定时间控制器的设计方法,其特征在于,第一步误差的获取基于反步控制原理。6.根据权利要求1所述的一种双关节机械臂的预定时间控制器的设计方法,其特征在于,s3中第一步误差为:z1=q
1-q
d-μ(t,t)其中,z1为第一步误差,q1为机械臂的实际角位置,q
d
为目标跟踪轨迹,t为收敛时间的设定值,μ(t,t)为时变调节函数向量。7.根据权利要求1所述的一种双关节机械臂的预定时间控制器的设计方法,其特征在
于,s4虚拟控制律的设置方法为:其中,α为虚拟控制律,c1为控制参数,z1为第一步误差,为目标跟踪轨迹的一阶导,为时变调节函数向量的一阶导。8.根据权利要求1所述的一种双关节机械臂的预定时间控制器的设计方法,其特征在于,s5中第二步误差为:z2=q
2-α其中,α为虚拟控制律,z2为第二步误差,q2为机械臂角速度。9.根据权利要求1所述的一种双关节机械臂的预定时间控制器的设计方法,其特征在于,s6中预定时间控制器的设计方法为:其中,u为预定时间控制器,c2为控制参数,z2为第二步误差,c为机械臂的离心力和哥氏力的矩阵,q2为机械臂的角速度,g为机械臂的重力项,d为已知常数,tanh(
·
)为双曲正切函数,κ=0.2785,κ1为常数,ε为最终收敛误差的上界控制参数,z1为第一步误差,m为机械臂的转动惯矩阵量,为虚拟控制律的一阶导。10.根据权利要求1所述的一种双关节机械臂的预定时间控制器的设计方法,其特征在于,所述s4和s6结束后均采用李雅普诺夫函数进行稳定性分析。
技术总结
本发明公开了一种双关节机械臂的预定时间控制器的设计方法,基于双关节机械臂数学模型,并基于转换后的模型公式设计调节函数,获取第一步误差,设计虚拟控制律,最后获取第二步误差,设计出预定时间控制器,本发明不仅可以保证系统的收敛时间的状态一致性和参数一致性;同时在所提出的预定时间控制器中,系统的收敛时间是控制器中的一个参数,因此可以直接通过该参数设定并调节系统的收敛时间。接通过该参数设定并调节系统的收敛时间。接通过该参数设定并调节系统的收敛时间。
技术研发人员:王文聪 侯明善 刘柏均 乔思雨 冯丹
受保护的技术使用者:西北工业大学
技术研发日:2022.09.14
技术公布日:2022/11/11
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。