1.本发明涉及一种用于提升运输集装箱(container,容器)的吊具(spreader),涉及包括这种吊具的集装箱装卸装备,并且涉及一种使用吊具提升运输集装箱的方法。
背景技术:
2.联运集装箱是一种标准化的船运集装箱,该船运集装箱能够在不同运输模式(诸如铁路、卡车和船舶)之间使用和转移,而无需卸载和重新装载集装箱内部的货物。不同标准尺寸的集装箱和其他类型的的刚性负载托架通常借助于集装箱吊具或轭架(yoke)装卸,该集装箱吊具或轭架可以典型地由卡车或起重机承载。吊具在提升铸件(lifting casting)处附接到集装箱,该提升铸件经常被称为拐角铸件,因为它们典型地布置在标准20或40英尺集装箱的所有拐角中。为了这个目的,吊具设置有本领域已知的多个扭锁或其他集装箱连接器装置。经常,吊具是能伸缩的以便允许改变沿着集装箱的纵向轴线的集装箱连接器装置之间的距离,以便适应不同标准长度的集装箱。联运集装箱的标准由国际标准化组织iso,例如标准iso 668:2013和iso 1496-1:2013指定。
3.wo2017135851a1公开了一种用于装卸联运集装箱的顶部提升吊具。
4.经常,运输集装箱起重机的操作者或正面吊运机的驾驶员远离吊具定位,并且集装箱和其他物体可能削弱能见度。联运集装箱是重的,并且这种集装箱的粗心搬运可能是危险的。此外,吊具受到磨损并且需要定期维护。
技术实现要素:
5.本发明的目的是解决或至少减轻以上提到问题的部分或全部。为此,提供了一种用于提升运输集装箱的吊具,该吊具包括主框架,该主框架具有第一端和第二端,并且沿着纵向轴线在第一端与第二端之间延伸,第一端承载第一集装箱连接器装置并且第二端承载第二集装箱连接器装置,第一和第二集装箱连接器装置中的每个配置成与运输集装箱接合;以及主框架悬挂装置,其中,主框架能平移地悬挂在主框架悬挂装置中以使得能够沿着纵向轴线平移,其中,主框架配置成由主框架悬挂装置沿着在主框架悬挂装置的第一支撑端与第二支撑端之间延伸的支撑线竖直地支撑,主框架悬挂装置承载悬挂装置负载的重量,该负载包括主框架、集装箱连接器装置以及任何附接到集装箱连接器装置的集装箱,该吊具还包括检测器装置,该检测器装置配置成检测悬挂装置负载的质心是否定位在沿着支撑线超出限制位置的纵向位置处。因此,可以相应地识别和处理具有纵向偏心负载的集装箱,即具有不在沿着纵向轴线的集装箱几何中心处的纵向位置处的重心的集装箱,这降低了事故的风险和集装箱吊具的过度磨损。例如,偏心负载集装箱可以从进一步的装卸中被分拣出来,或者以更平衡的方式被重新装载。
6.此外,检测包括由主框架悬挂装置承载的所有部分的整个悬挂装置负载的偏心率使得能够以准确的方式补偿在主框架与主框架悬挂装置之间的接口处的偏心率。吊具可以是顶部提升吊具,该顶部提升吊具配置成从上方连接到待提升集装箱的以矩形图案布置的
四个提升铸件。可替代地,吊具可以是侧向提升吊具,该侧向提升吊具配置成仅附接到集装箱的一个单个竖直侧面的提升铸件。根据实施方式,运输集装箱可以是在拐角处设置有提升铸件的联运集装箱,诸如符合标准iso 668:2013和iso 1496-1:2013中任一项的运输集装箱。集装箱连接器装置中的每个可以包括配置成与联运集装箱的提升铸件接合的至少一个相应提升铸件连接器。可替代地或另外地,集装箱连接器装置可以包括用于抓取集装箱底面的抓取臂;在这种实施方式中,集装箱不需要任何在拐角处的提升铸件。
7.根据实施方式,限制位置距主框架的纵向中心一定距离。例如,限制位置可以在例如距主框架的纵向中心大于200mm的距离处,或者例如距主框架的纵向中心大于400mm的距离处。
8.根据实施方式,支撑端可以是限制位置。因此,可以降低极度偏心的负载的意外平移的风险,而不过度限制吊具的一组允许动作。这以有效的方式减小了主框架和主框架悬挂装置的任何部分的磨损,这些部分没有被设计和适于,例如通过不设置有减摩装置(诸如滚轮或滑动垫)参与彼此的任何接合。
9.根据实施方式,检测器装置可以配置成检测质心是否定位在超出支撑端中的任一个的纵向位置处。这种装置甚至进一步降低了极度偏心的负载的意外平移的风险。
10.根据实施方式,检测器装置可以配置成确定质心是否定位超出第一支撑端或超出第二支撑端。这种信息可以是有用的,例如用于向操作者或控制系统反馈,用于在尝试新的提升之前沿着主框架悬挂装置重新定位主框架。
11.根据实施方式,检测器装置可以配置成检测在主框架与主框架悬挂装置之间形成的角度的变化。
12.根据实施方式,检测器装置可以配置成基于主框架的至少一部分相对于主框架悬挂装置的位移来检测负载的质心是否定位在沿着支撑线超出限制位置的纵向位置处。该位移可以是竖直位移。
13.根据实施方式,检测器装置可以配置成基于在第一支撑端处主框架相对于主框架悬挂装置的竖直位移来检测质心超出第二支撑端。可以沿着支撑线检测竖直位移,例如,在第二支撑端的位置处或与第二支撑端邻近的位置,或者在沿着吊具的长度的任何其他适当位置处。竖直位移可以由存在传感器(例如电感式传感器)检测,该存在传感器附接到主框架和主框架悬挂装置中的一个,并且配置成检测主框架和主框架悬挂装置中的另一个的存在。
14.根据实施方式,检测器装置可以包括与第一支撑端邻近的第一传感器,该第一传感器配置成在第一支撑端处检测主框架相对于主框架悬挂装置的竖直位移。这种检测装置是廉价并且可靠的。第一传感器可以是附接到主框架和主框架悬挂装置中的一个,并且配置成检测主框架和主框架悬挂装置中的另一个的存在的存在传感器。根据一个实例,第一传感器可以是感应式传感器。
15.根据实施方式,检测器装置可以配置成基于在第二支撑端处主框架相对于主框架悬挂装置的竖直位移来检测质心超出第一支撑端。
16.根据实施方式,检测器装置可以包括与第二支撑端邻近的第二传感器,该第二传感器配置成在第二支撑端处检测主框架相对于主框架悬挂装置的竖直位移。第二传感器可以是附接到主框架和主框架悬挂装置中的一个,并且配置成检测主框架和主框架悬挂装置
中的另一个的存在的存在传感器。根据一个实例,第二传感器可以是感应式传感器。
17.根据实施方式,检测器装置可以配置成至少在两个纵向分开的位置处检测主框架相对于主框架悬挂装置的竖直位移。这种检测器装置允许检测主框架是否相对于主框架悬挂装置以及枢转方向枢转。此外,它允许检测整个主框架是否相对于主框架悬挂装置向上移动。如果降低吊具直到主框架搁置在集装箱上时,则这可能发生。当检测到这种情况时,检测装置可以向操作者或控制系统生成信号以停止降低吊具,或者限制降低速度。检测器装置可以包括如上文限定的第一传感器和第二传感器。
18.根据实施方式,主框架悬挂装置可以配置成允许主框架在第一支撑端和第二支撑端处的竖直游隙(vertical play)小于300mm。典型地,大于2mm的竖直游隙可以是优选的以减轻制造公差。根据另一实施方式,竖直游隙可以在10mm与120mm之间。
19.根据实施方式,主框架的面向下的表面可以能滑动地搁置在主框架悬挂装置的面向上的表面上,以使得能够在主框架与主框架悬挂装置之间纵向平移。主框架的面向下的表面和主框架悬挂装置的面向上的表面可以是水平表面。作为一个替代配置的实例,吊具可以配置成龙门悬挂吊具,其中,主框架将经由多个竖直连杆从主框架悬挂装置悬挂,该竖直连杆枢转地连接到主框架以及主框架悬挂装置。竖直连杆可以配置成悬挂杆,该悬挂杆可以以任何其他适当方式侧移。悬挂杆可以任选地配置成液压缸,从而还使得能够调节集装箱的倾斜。
20.根据实施方式,主框架可以包括一对相对的外侧壁面,每个外侧壁面设置有从外侧壁面突出并且沿着纵向轴线延伸的相应侧移轨道,每个侧移轨道搁置在主框架悬挂装置的相应竖直支撑件上,以便允许主框架沿着纵向轴线在竖直支撑件上移动。这种装置简单并且可靠。任选地,可以通过面向相应外侧壁面的一对侧支撑件沿着所述纵向轴线引导主框架。
21.根据实施方式,支撑线可以是由包括至少一个滑动垫的滑动垫装置限定的。
22.根据实施方式,第一集装箱连接器装置可以包括第一行进梁,并且第二集装箱连接器装置可以包括第二行进梁,其中,第一行进梁的近端在主框架中被引导以在沿着纵向轴线的第一方向上从主框架能伸缩地延伸,并且第一行进梁的远端配置成与运输集装箱的第一端接合,并且其中,第二行进梁的近端在主框架中被引导以在沿着纵向轴线的第二方向上从主框架能伸缩地延伸,并且第二行进梁的远端配置成与运输集装箱的第二端接合。因此,可以改变第一和第二集装箱连接器装置的远端之间的纵向距离,以适应不同长度的运输集装箱。例如,集装箱经常具有20英尺或40英尺的标准长度,并且第一集装箱连接器装置和第二集装箱连接器装置可以是能伸缩地延伸以允许连接到那些长度中的任一个。任选地,主框架可以包括沿着纵向轴线引导第一行进梁的第一行进梁引导件,和与第一行进梁引导件邻近的沿着纵向轴线引导第二行进梁的第二行进梁引导件。可替代地,行进梁可以一个被引导在另一个内部。
23.根据实施方式,第一集装箱连接器装置和第二集装箱连接器装置中的每个可以包括在横向于纵向轴线的方向上延伸的相应横向梁,该横向方向可以基本上垂直于纵向轴线,横向梁中的每个设置有沿着横向方向分开的两个相应提升铸件连接器,以用于连接到运输集装箱的两个提升铸件。典型地,横向梁的两个提升铸件连接器连接到集装箱的两个相应短侧提升铸件,使得两个集装箱连接器装置连接到运输集装箱的矩形面的所有四个拐
角的提升铸件。
24.根据实施方式,检测器装置可以配置成基于检测向吊具的控制系统或操作者生成电子指示信号。如果检测到偏心负载,则电子指示信号可以例如点亮警告灯,和/或指示操作者或控制系统在继续提升之前吊具应当侧移的方向,和/或向控制系统施加关于吊具或任何可操作地连接到吊具的装备允许何种操纵的控制约束。这种控制约束可以例如是最大提升力的限制,以防止提升集装箱和/或防止侧移,即主框架相对于主框架悬挂装置沿着纵向轴线的平移。信号还可以用于将集装箱分拣出来用于重新装载,和/或将集装箱物流数据库内的集装箱标记为不符合负载偏心率要求。控制系统可以布置在吊具中,布置在承载吊具的任何集装箱装卸装备中,或两者中。控制系统可以包括专门设计用于操作集装箱装卸装备和/或吊具的模拟和/或数字电子装置,诸如专用集成电路,和/或设置有配置成操作相应的集装箱装卸装备和/或吊具的计算机程序指示的通用目的处理电路。
25.根据实施方式,检测器装置可以包括用于动力桩斜坡(powered pile slope)的至少一个致动器,其中,检测是基于在至少一个致动器上检测到的负载。术语“桩斜坡”是指改变集装箱的侧向倾斜,即纵倾。任选地,至少一个致动器包括两个或多个纵向分开的致动器,其中,检测是基于在两个或多个致动器上检测到的负载。致动器可以是液压缸;因此,可以通过检测相应液压缸中的液压压力来检测负载。致动器上的负载可以与集装箱的确定重量和确定侧移位置组合,以用于独立地确定集装箱的质心的位置。
26.吊具还可以包括包括起重机支架的起重机连接接口,该起重机连接接口使得吊具能够刚性地连接到例如车辆的起重机臂或吊杆。起重机连接接口还可以包括一个或多个致动器,诸如一个或多个液压缸,使得起重机臂与吊具之间的刚性连接限定刚性可控接头。
27.根据第二方面,通过包括如上文限定的吊具的集装箱装卸装备来解决或至少减轻以上提到问题的部分或全部,集装箱装卸装备包括控制系统,该控制系统配置成基于检测施加限制集装箱装卸装备的一组允许操作的控制约束。控制系统可以是这种吊具,和/或例如承载吊具的卡车的控制系统;控制约束可以例如是以上限定的任何约束。根据实施方式,包括控制系统的吊具本身可以构成如以上限定的集装箱装卸装备。
28.根据实施方式,吊具可以包括配置成使主框架围绕垂直于纵向轴线的基本上竖直的旋转轴线旋转的旋转器,其中,控制系统配置成基于质心的检测到的位置来制动或阻挡主框架经由旋转器的旋转,和/或施加限制使旋转器围绕平行于纵向轴线的轴线倾斜的可能性的控制约束。如果负载是偏心的,则旋转轴线的倾斜可以导致负载在旋转器中不可控地旋转。这可以通过阻挡旋转器或防止旋转器的倾斜来避免。倾斜可以通过例如对倾斜接头的致动施加控制约束,和/或通过约束允许主框架在倾斜方向上移动的任何动力阻尼装置来限制。
29.根据第三方面,通过一种使用吊具提升运输集装箱的方法来解决或至少减轻以上提到问题的部分或全部,该方法包括:将主框架定位在沿着主框架悬挂装置的纵向位置处;将吊具的集装箱连接器装置附接在集装箱的两个纵向端处;通过提升吊具启动集装箱的提升;以及检测由主框架悬挂装置承载的负载的质心的纵向位置是否超出限制位置。该方法可以使用如以上限定的吊具或集装箱装卸装备来执行。
30.根据第四方面,通过一种使用吊具提升运输集装箱的方法来解决或至少减轻以上提到问题的部分或全部,吊具包括由主框架悬挂装置承载的主框架,该方法包括:将由主框
架承载的集装箱连接器装置附接在集装箱的两个纵向端处;通过提升吊具启动集装箱的提升;检测集装箱的质心的纵向偏心率;以及基于检测到的偏心率,通过侧向移动主框架,朝向主框架悬挂装置的纵向中心,侧向移动集装箱的质心。该方法可以使用如以上限定的吊具或集装箱装卸装备来执行。可替代地或另外地,集装箱负载偏心率可以通过测量连接到集装箱的相应纵向端的集装箱连接器装置的竖直负载来检测。
31.根据第五方面,通过一种用于提升运输集装箱的吊具来解决或至少减轻以上提到问题的部分或全部,该吊具包括主框架,该主框架具有第一端和第二端,并且在第一端与第二端之间沿着纵向轴线延伸,第一端设置有第一集装箱连接器装置并且第二端设置有第二集装箱连接器装置,第一和第二集装箱连接器装置中的每个包括配置成与运输集装箱的提升铸件接合的至少一个相应提升铸件连接器;以及主框架悬挂装置,其中,主框架能平移地悬挂在主框架悬挂装置中以使得能够沿着纵向轴线平移,其中,主框架配置成由主框架悬挂装置沿着在第一支撑端与第二支撑端之间延伸的支撑线竖直地支撑,使得主框架承悬挂装置负载的重量,该负载包括主框架,集装箱连接器装置,以及任何附接到集装箱连接器装置的集装箱,该吊具还包括检测器装置,该检测器装置配置成至少在两个纵向分开的位置处检测主框架相对于主框架悬挂装置的竖直位移。这种检测器装置允许检测吊具何时已经着陆在集装箱上。来自检测器装置的输出信号可以用于在可操作地连接到吊具的控制系统中施加限制,以限制吊具的继续下降。可以根据以上实施方式中的任一个来配置吊具。
32.根据第六方面,通过一种使用吊具提升运输集装箱的方法来解决或至少减轻以上提到问题的部分或全部,该吊具包括沿着纵向轴线延伸的主框架,该主框架悬挂在主框架悬挂装置中,该方法包括:将吊具降低到集装箱上;以及在至少两个纵向分开的位置处检测主框架相对于主框架悬挂装置的竖直位移。这种检测可以向操作者或控制系统提供关于吊具何时就位到集装箱上和就位到何种程度的有价值的引导。该方法可以使用如以上限定的吊具来执行。
33.注意,本发明的实施方式可以通过权利要求中叙述或以上限定的特征的所有可能组合来体现。此外,应当理解,第一方面、第二方面和第五方面的吊具和集装箱装卸装备描述的各种实施方式均可与根据本发明的第三方面、第四方面和第六方面限定的方法组合,反之亦然。
附图说明
34.参考附图,通过以下本发明的优选实施方式的说明性并且非限制性的详细描述,将更好地理解本发明的以上以及附加目的、特征和优点,附图中相同的参考标号将用于类似的元件,在附图中:
35.图1是联运集装箱的透视图;
36.图2是图1的联运集装箱的顶部提升铸件的透视图;
37.图3是根据第一实施方式的吊具的正投影;
38.图4a是从下方看到的图3的吊具处于纵向缩回位置时的示意图;
39.图4b是从下方看到的图3的吊具处于纵向延伸位置时的示意图;
40.图5是承载图3的吊具的正面吊运机的侧视图;
41.图6示出了图3的吊具的主框架和主框架悬挂装置的截面,该截面是沿着图3的平
面vi-vi截取的;
42.图7a示出了涉及根据第一实施方式的检测器装置的图3的吊具的主框架悬挂装置和主框架的侧移轨道的截面,该截面是沿着图6的平面vii-vii截取的,其中,主框架和主框架悬挂装置处于第一相互关系;
43.图7b对应于图7a的视图,其中,主框架和主框架悬挂装置处于第二相互关系;
44.图7c对应于图7a的视图,其中,主框架和主框架悬挂装置处于第三相互关系;
45.图7d对应于图7a的视图,其中,主框架和主框架悬挂装置处于第四相互关系;
46.图8示出了涉及根据第二实施方式的检测器装置的图3的吊具的主框架悬挂装置和主框架的侧移轨道的截面,该截面对应于沿着图6的平面vii-vii截取的截面加以必要的修改,其中,主框架和主框架悬挂装置处于对应于图7a的第一相互关系的相互关系;
47.图9是从下方倾斜地看到的图3的吊具的提升铸件连接件的透视图;
48.图10是从上方倾斜地看到的图9的提升铸件连接器的凸形锁定插入件的透视图;
49.图11a是示出了在连接之前的图3的吊具和图1的集装箱的侧视图;
50.图11b对应于图11a的视图,示出了在连接之后的吊具和集装箱,其中,吊具的主框架和主框架悬挂装置处于第一相互关系;
51.图11c对应于图11b的视图,其中,吊具的主框架和主框架悬挂装置处于第二相互关系;
52.图12是示出了连接到图1的集装箱上的吊具的另一实施方式的侧视图;
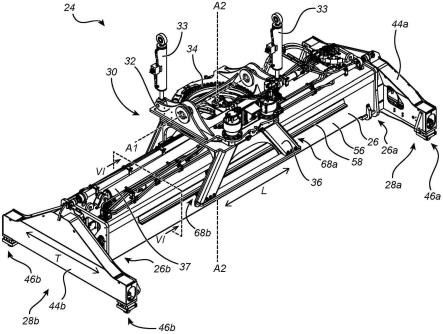
53.图13是示出了根据第一实施方式的提升集装箱的方法的流程图;
54.图14是示出了根据第二实施方式的提升集装箱的方法的流程图;以及
55.图15是示出了根据第三实施方式的提升集装箱的方法的流程图;
56.所有附图是示意性的,不一定按比例,并且通常仅示出了为了说明实施方式而必要的部分,其中,可以省略其他部分。
具体实施方式
57.图1示意性地示出了根据以上提到的iso标准的联运集装箱10。集装箱10,为了清楚起见被示出是透明的,具有顶面10a、第一纵向侧10b、以及第一短侧或山形侧(gable side,三角形侧部)10c。集装箱还具有底面10d、第二纵向侧和第二山形侧10e,它们分别与顶面10a、第一纵向侧10b和第一山形侧10c平行并且相对。集装箱10的每个拐角设置有相应的提升铸件,以用于附接相应的提升铸件连接器,用于便于装卸集装箱10的目的,以及用于将集装箱10锁定到其他集装箱或货运船的甲板上。因此,限定顶面10a的拐角的集装箱顶部拐角在集装箱10的第一纵向端14a处设置有两个提升铸件12a,并且在集装箱10的第二纵向端14b处设置有两个提升铸件12b。类似地,集装箱底部拐角在底面的四个拐角处设置有四个底部提升铸件15a、15b。
58.图1还示出了布置在笛卡尔坐标系中的集装箱10,其中,集装箱10的底面10d在x-y平面中,集装箱10的纵向侧10b沿着x-z平面布置,并且集装箱10的山形侧10c、10e沿着y-z平面布置。集装箱10的旋转方向典型地是通过参考装置在货船上的集装箱的旋转方向给出的。布置在货船上的集装箱10沿着货船的长度与具有纵向侧10b的货船对齐。集装箱的旋转运动因此可以通过参考货船的运动来限定,即倾斜、纵倾和偏斜。倾斜是围绕x轴的旋转,并
且有时也被称为倾斜。纵倾是围绕y轴的旋转;在本文中,纵倾还可以被称为集装箱10的侧向倾斜。偏斜是围绕z轴的旋转。
59.图2以与图1的透视图相同的透视图更详细地示出了顶部提升铸件12b中的一个。它设置有顶面锁定开口18、纵向侧锁定开口20以及山形锁定开口(gable lock opening)22,它们中的每个配置成接收提升铸件连接器的凸形插入件(诸如提升钩或扭锁)并且与之接合。应当理解,所有顶部提升铸件12a、12b可以是相同的,尽管呈镜面构型。
60.图3示出了用于装卸根据以上提到的iso标准的联运集装箱的顶部提升吊具24。吊具24包括沿着在第一端26a与第二端26b之间的纵向轴线l延伸的主框架26。第一端26a承载配置成连接到集装箱的第一端14a的第一集装箱连接器装置28a(图1),并且第二端26b承载配置成连接到集装箱的第二端14b的第二集装箱连接器装置28b(图1)。
61.吊具24还包括主框架托架30,主框架托架包括起重机支架32,该起重机支架配置成连接到起重机(未示出),诸如伸缩式吊杆起重机或钢丝起重机。起重机支架32可连接到起重机以使得能够围绕沿着纵向轴线l延伸的水平枢转轴线a1倾斜集装箱,以用于改变集装箱10的倾斜(图1)。为了这个目的,一对液压倾斜缸33同样可连接到起重机。主框架托架30还包括旋转器34,该旋转器使得主框架26和由吊具24保持的任何集装箱10能够相对于起重机支架32围绕基本上竖直的旋转轴线a2转动,以用于改变集装箱的偏斜。主框架托架30还包括主框架悬挂装置36,该主框架悬挂装置使得主框架26能够相对于主框架悬挂装置36沿着纵向轴线l平移。主框架悬挂装置36因此承载悬挂装置负载的重量,该负载包括主框架26、集装箱连接器装置28a、28b,以及任何附接到集装箱连接器装置28a、28b的集装箱10。配置成沿着主框架26延伸的液压缸的侧移机构37连接到主框架26以及主框架悬挂装置36。侧移机构37使得主框架26能够相对于主框架悬挂装置36沿着纵向轴线l移动。侧移机构37还包括侧移传感器(未示出),该侧移传感器使得能够确定主框架悬挂装置36与主框架26之间的相互位置关系。侧移传感器可以这种布置在液压缸内,或者设置为单独的传感器。
62.图4a和图4b以高度示意性的方式示出了吊具24,并且如从下方看到的。第一集装箱连接器装置28a包括在第一行进梁引导件中被引导的第一行进梁38a,第一行进梁引导件配置成主框架26内的套管27a。类似地,第二集装箱连接器装置28b包括在第二行进梁引导件中被引导的第二行进梁38b,第二行进梁引导件配置成主框架26内的套管27b。行进梁38a,38b在用于将吊具24连接到20英尺集装箱的缩回位置(图4a)与用于将吊具24连接到40英尺集装箱的伸展位置(图4b)之间能伸缩地延伸。第一行进梁38a的近端40a在主框架26中被引导以沿着纵向轴线l在第一延伸方向e1上从主框架26能伸缩地延伸,第一行进梁38a的远端42a设置有在基本上垂直于纵向轴线l的横向方向t上延伸的相应第一横向梁44a。第一集装箱连接器装置28a还包括配置成布置在第一横向梁44a的相对端处的扭锁46a的第一对提升铸件连接器,该第一对扭锁46a可连接到集装箱10第一纵向端14a的顶部提升铸件12a的顶面锁定开口18(图2)。
63.类似地,第二行进梁38b的近端40b在主框架26中被引导以沿着纵向轴线l在与第一延伸方向相反的第二延伸方向e2上从主框架26能伸缩地延伸,并且第二行进梁38b的远端42b设置有沿着横向方向t延伸的相应第二横向梁44b。第二集装箱连接器装置28b包括配置成布置在第二横向梁44b的相对端处的扭锁46b的第二对提升铸件连接器,该第二对扭锁46b可连接到集装箱10第二纵向端14b的顶部提升铸件12b的顶面锁定开口18(图2)。为了清
楚起见,应当指出,图3示出了吊具24,其中,行进梁38a、38b处于缩回位置中,使得它们隐藏在主框架26内。
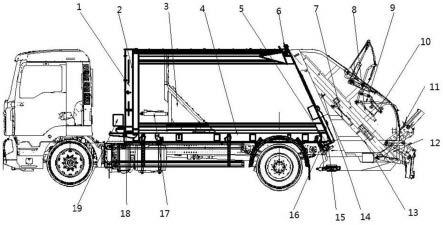
64.图5示出了附接到卡车50的伸缩式吊杆起重机48以形成正面吊运机52的吊具24。图5示出了具有附接到吊具24的集装箱10的正面吊运机52。卡车50还设置有控制系统54,该控制系统包括用于控制卡车50以及起重机48和吊具24的电子和/或计算机程序指示。
65.图6高度示意性地示出了在沿着垂直于纵向轴线l的截面平面vi-vi(图3)的区段中的主框架26和主框架悬挂装置36。主框架包括一对相对的外侧壁面56。相应侧移轨道58焊接到每个侧壁56的外面,侧移轨道58从侧壁56突出并且沿着纵向轴线l延伸(图3)。每个侧移轨道58由主框架悬挂装置36的相应的竖直支撑件60竖直地支撑并且滑动地搁置在竖直支撑件上,以允许主框架沿着纵向轴线l在竖直支撑件60上滑动。竖直支撑件60设置有可以由诸如聚氨酯的塑料材料制成的滑动垫64,以用于减小用于沿着主框架悬挂装置36滑动主框架26的摩擦。滑动垫64还限定面向相应外侧壁面56的一对相对的侧支撑件62,以用于沿着纵向轴线l引导主框架26。图6还示出了在其相应行进梁引导件27a、27b内的行进梁38a、38b。减摩滑动垫66围绕行进梁38a,38b的周边布置。
66.图7a示出了如在图6的截面vii-vii中看到的侧移轨道58和主框架悬挂装置36。侧移轨道58的面向下的表面沿着在第一支撑端68a与第二支撑端68b之间延伸的支撑线s可移动地搁置在滑动垫64的面向上的表面上。主框架悬挂装置36还包括位于侧移轨道58上方距离d1处的第一上限止动件70a和第二上限止动件70b,在侧移轨道58不与滑动垫64接触的情况下为侧移轨58提供上限。这可以在以下将阐明的情况下发生。上限止动件70a、70b中的每个还设置有配置成检测侧移轨道58的存在并且将相应的传感器信号传送到控制系统54(图5)的相应的侧移轨道检测器72a、72b。类似的上限止动件72b’和侧移轨道检测器70b’可以任选地设置在主框架26的相对侧。侧移轨道检测器72a、72b形成简单的检测器装置72,其能够检测负载的质心是否定位超出支撑端68a、68b中的任一个。
67.图7b示出了负载的质心定位超出第一支撑端68a的情况。在这种情况下,第一支撑端68a限定支点,悬挂装置围绕支点装载,即主框架26(图3)连同由其承载的任何附加负载一起枢转。当侧移轨道58到达第二上限止动件70b时,通过第二侧移轨道检测器72b检测侧移轨道58的存在。在第二上限止动件70b处存在侧移轨道58与在第一上限止动件70a处不存在侧移轨道58组合指示悬挂配置负载的质心的位置不在第一支撑端68a与第二支撑端68b之间,而是超出第一支撑端68a,如从支撑端68a、68b之间的位置看到的。
68.响应于图7b已经检测到的偏心负载情况,控制系统54(图5)可以施加防止例如侧移主框架26(图3)的控制约束,从而防止第二限制止动器70b与侧移轨道58的上表面之间的摩擦磨损,和/或防止集装箱10的进一步提升(图5)。控制系统54还可以配置成操作侧移致动器以相对于主框架悬挂装置36沿着纵向轴线l的方向向右平移主框架26,如图7b的视图看到的,从而将悬挂装置负载的重心的纵向位置移动到支撑端68a、68b之间的位置。此外,控制系统54可以配置成制动或阻挡主框架26经由旋转器34的旋转(图3),和/或施加限制使旋转器34围绕平行于纵向轴线l的轴线倾斜的可能性的控制约束。
69.图7c示出了类似于图7b的情况,尽管悬挂装置负载的质心改为定位超出第二支撑端68b。在这种情况下,第二支撑端68b限定悬挂装置负载围绕其枢转的支点。当侧移轨道58到达第一上限止动件70a时,将通过第一侧移轨道检测器72a检测侧移轨道58的存在。在第
一上限止动件70a存在侧移轨道58与在第二上限止动件70b处不存在侧移轨道58组合指示悬挂配置负载的质心的位置超出第二支撑端68b,如从支撑端68a、68b之间看到的。该情况可以通过控制系统以类似于参考图7b描述的方式加以必要的修改来处理。
70.如从图7a到图7c显而易见的,包括侧移轨道检测器72a、72b的检测器装置能够检测在图7中由侧移轨道58表示的主框架26与主框架悬挂装置36之间形成的角度β的变化。检测器装置还能够检测角度β的改变方向。侧移轨道检测器72a、72b还可以配置成确定从相应侧移轨道检测器72a、72b到侧移轨道58的最短距离,从而使得能够确定角度β的改变幅度。
71.图7d示出了侧移轨道58沿着其整个长度已经升高到支撑线s上方的情况,指示悬挂装置负载不再由主框架悬挂装置36承载。该情况可以通过向控制系统54(图5)指示侧移轨道58的存在的两个侧移轨道检测器72a、72b来检测。如果吊具下降直到主框架26搁置在集装箱10上时,并且此后主框架悬挂装置36甚至进一步下降,则可能发生这种情况。控制系统54可以通过例如向操作者或控制系统生成信号以停止降低吊具24或限制降低速度对示出的检测做出响应。
72.图8示出了根据第二实施方式的检测器装置172的示意图。类似于图7a到图7d的检测器装置72,图8的检测器装置172包括与支撑线s的相应支撑端68a、68b邻近布置并且配置成检测侧移轨道58的存在的两个侧移轨道检测器172a、172b。然而,图8的检测器装置172与图7a到图7d的检测器装置72的不同之处在于检测器172a、172b布置在侧移轨道58下方。因此,检测器装置172将不通过检测在第二侧移轨道检测器72b(图7b)处存在侧移轨道58,而是通过检测在第二侧移轨道检测器172b处不存在侧移轨道58来检测例如图7b所示的情况。
73.图9示意性地示出了包括凸形锁定插入件74的扭锁46b,该凸形锁定插入件配置成插入到相应集装箱提升铸件12b(图2)的顶部开口18(图2)中。一旦在提升铸件12b内部,凸形锁定插入件74的端部76配置成围绕竖直轴线r扭转90
°
到锁定位置,在该锁定位置中,该凸形锁定插入件与提升铸件12b接合。邻接面78(阴影线)位于凸形锁定插入件74的侧翼,对应于提升铸件12b的顶面19(图2)的尺寸和形状,并且配置成一旦吊具24(图3)已经降低到集装箱10上就搁置在其上。着陆指示器具有竖直可移动的指示器本体80,其一部分从邻接面78向下突出。着陆指示器配置成当提升铸件12b的上部表面19将指示器本体80竖直地按压到扭锁46b的邻接面78中时进行指示,并且将这种事件向控制系统54(图5)通知。
74.在扭锁46b上还设置有用于测量由扭锁46b承载的竖直负载的竖直负载传感器272b。图10示出了传感器272b的示例性实施方式,根据该示例性实施方式,竖直负载传感器272b(图9)配置成由凸形锁定插入件74承载的应变仪280。类似的竖直负载传感器设置在吊具24(图4a)的所有四个扭锁46a、46b上,使得可以确定每个相应转锁46a,46b上的竖直负载。连同由侧移机构37(图3)的侧移传感器确定的主框架26相对于主框架悬挂装置36的纵向位置,由竖直负载传感器272b确定的竖直负载能够确定悬挂装置负载的质心的位置。可以在吊具24的控制系统(图3)或任何操作吊具24的集装箱装卸装备(诸如控制系统54(图5))中进行这种确定。因此,参考图11a,侧移传感器、控制系统54和竖直负载传感器272b一起限定根据第三实施方式的配置成检测沿着支撑线s的负载的质心的位置的检测器装置272。具体地,检测器装置272能够确定质心是否沿着支撑线s超出限制位置。图11a到图11c示出根据第三实施方式的检测器装置272的操作。
75.从图11a的情况开始,将吊具24降低到集装箱10上用于经由集装箱连接器装置
28a-b连接到集装箱。
76.在图11b的情况中,吊具24已经连接到集装箱10,并且在由箭头指示的方向上启动提升。由主框架悬挂装置36承载的总竖直悬挂装置负载是集装箱10、主框架26以及集装箱连接器装置28a-b的质量之和。在图11b的视图中,集装箱的质心由mc指示,并且集装箱10的重量,即集装箱10上的重力由箭头gc指示。类似地,主框架26和集装箱连接器装置28a-b的质心由mf指示,并且主框架26和集装箱连接器装置28a-b的重量由箭头gf指示。如从集装箱的质心mc的位置显而易见的,集装箱重量gc相对于集装箱10的几何中心沿着纵向轴线l是偏心的。由集装箱、主框架和集装箱连接器装置重量gc、gf的总和形成的主框架悬挂装置36上的总竖直负载gt也相对于主框架悬挂装置36沿着纵向轴线l是偏心的,并且将在主框架悬挂装置36上产生扭矩,该扭矩可能对搬运集装箱10具有负面影响。
77.基于由集装箱连接器装置28a-b的相应竖直负载传感器272b(图9)确定的竖直负载,结合由侧移机构37(图3)确定的侧移位置,以及主框架26和集装箱连接器装置28a-b的质心mf和重量gf的先验知识,可以例如在控制系统54(图5)中确定总悬挂装置负载的重量gt和质心mt相对于主框架悬挂装置36的纵向位置。控制系统54还可以确定质心mt超出限制位置p,并且响应于此,使主框架26侧移。限制位置p可以距主框架悬挂装置36的纵向中心c一定纵向距离,该纵向距离可以在控制系统54(图5)中设定。因此,参考图11a到图11c描述的实施方式与参考图7a到图7d描述的实施方式的不同之处在于限制位置p可以自由设置,并且不必要位于支撑端68a-b(图7a)。
78.在图11c的情况中,控制系统54基于在图11b的情况中确定的总悬挂装置负载gt的纵向位置来操作侧移机构37(图3),以沿着纵向轴线l在水平箭头的h方向上将主框架26移动到示出的位置,在该位置中,悬挂装置负载gt集中在主框架悬挂装置36下方。
79.图12示出了设置有动力桩斜坡致动器90的吊具24的实施方式,致动器90配置成液压缸。动力桩斜坡致动器90由控制系统54控制,并且使得集装箱10能够围绕枢轴92侧向倾斜。当集装箱被水平地保持时,动力桩斜坡致动器90之间的液压差指示偏心悬挂装置负载gt,该指示可以根据本文中的教导使用。因此,动力桩斜坡致动器90可以形成检测器装置372的一部分,该检测器装置配置成检测悬挂装置负载的质心mt是否定位在超出限制位置的纵向位置处。单个双作用液压缸使得能够具有与图12的两个致动器90相同的功能。
80.图13的流程图示出了使用上文描述的吊具24提升集装箱的方法,该方法使得能够检测由偏心负载造成的潜在危险情况。该方法包括步骤:
81.1301:将主框架26定位在沿着主框架悬挂装置36的纵向位置处;
82.1302:将吊具的集装箱连接器装置28a、28b附接在集装箱10的两个纵向端14a、14b处;
83.1303:通过提升吊具24启动集装箱10的提升;以及
84.1304:检测由主框架悬挂装置36承载的负载gt的质心的纵向位置是否超出限制位置。
85.图14的流程图示出了使用上文描述的吊具24提升集装箱的第二方法,该方法减轻偏心装载的运输集装箱的任何潜在危险后果。该方法包括步骤:
86.1401:将由主框架26承载的集装箱连接器装置28a、28b附接在集装箱10的两个纵向端14a、14b处;
87.1402:通过提升吊具24启动集装箱10的提升;
88.1403:检测集装箱10的质心mc的纵向偏心率;以及
89.1404:基于检测到的偏心率,通过侧向移动主框架26,朝向主框架悬挂装置36的纵向中心,侧向移动集装箱10的质心mc。
90.图15的流程图示出了使用上文描述的吊具24提升集装箱的第三方法,该方法使得能够检测吊具24何时已经着陆在集装箱10上。该方法包括步骤:
91.1501:将吊具降低到集装箱10上;以及
92.1502:至少在两个纵向分开的位置处检测主框架26相对于主框架悬挂装置36的竖直位移。
93.以上主要参考几个实施方式描述了本发明。然而,如本领域技术人员容易理解的,除了上文公开的实施方式之外的其他实施方式在由所附权利要求限定的本发明的范围内同样是可能的。例如,本发明可应用于配置成接合和提升除了标准化联运集装箱的其他集装箱的吊具。集装箱连接器装置可以是不同于扭锁的类型,诸如提升钩和抓取臂。尽管已经参考顶部提升吊具描述了本发明,但是本文的教导也可应用于配置成仅与运输集装箱的单个纵向侧接合的侧提升吊具。
94.在权利要求中,“包括”一词不排除其他元件或步骤,以及不定冠词“一”或“一个”不排除复数。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。