1.本发明涉及取药设备技术领域,尤其涉及一种针剂药瓶的取药机构及设备。
背景技术:
2.医院住院部门的药房中,医护人员需要时常对住院的患者进行输液,输液准确工作中,需要对输入的溶液进行药物的配比,配比的药物都是存放于针剂瓶中,包括液体状药瓶以及粉状物药瓶,通常都存放于药盒内,使用时均需打开药盒并单个取出,随后对液体状药瓶需要敲落瓶口部,对粉状物药瓶需要去除盖片并注入溶解液溶解混合后才能使用,但是对于住院部药房存在需求迫切以及患者众多的问题,有时需要使用到多支药剂,导致医护人员劳动强度大,处理不及时,容易出现工作失误的问题,进而有可能导致输液不及时或错误的问题。
技术实现要素:
3.本发明的主要目的在于提供一种针剂药瓶的取药机构及设备,旨在解决现有的无法自动于药盒内取出针剂瓶的技术问题。
4.为实现上述目的,本发明提供了一种针剂药瓶的取药机构,涉及液体状药瓶以及粉状物药瓶,包括,
5.支撑座;
6.夹爪与旋转夹紧气缸,设于支撑座上,所述旋转夹紧气缸驱使夹爪开合夹取药瓶;
7.u型架,所述u型架与支撑座横向滑动配合;
8.矩形框,所述u型架与矩形框竖向滑动配合,所述u型架于矩形框上移动驱使夹爪于竖直方向上移动将药瓶于药盒内取出;
9.滚轮,设于支撑座两侧;
10.导轨,设于滚轮正上方,所述滚轮于导轨上滚动驱使夹爪由竖直状态摆动至水平状态将药瓶转移至开口向上方向;
11.视觉识别单元,用于识别药瓶;
12.驱动单元,用于提供动力输出。
13.进一步地,还包括导向板,设于u型架前侧,所述u型架前端与导向板滑动配合;
14.其中,所述导向板呈l型且与矩形框等高度设置,且导向板通过连接板与矩形框固定连接。
15.进一步地,所述驱动单元包括用于驱使夹爪竖向移动的第一气缸以及驱使夹爪由竖直状态摆动至水平状态的第二气缸。
16.进一步地,还包括第一开口单元,用于对液体状药瓶进行开口,所述第一开口单元包括,
17.环型导台;
18.活动座与侧滚轮,所述活动座与环型导台滑动配合,所述侧滚轮与环型导台外环
面贴合;
19.砂轮片与第一动力单元,设于活动座上,活动座沿着环型导台移动驱使砂轮片对液体状药瓶割口。
20.进一步地,所述第一开口单元还包括设于砂轮片上方的推块与第二动力单元,用于辅助被割口的液体状药瓶上部脱落。
21.进一步地,还包括第二开口单元,用于对粉状物药瓶进行开口,所述第二开口单元包括,
22.钩板与第三动力单元,所述钩板端部呈钩起状;
23.l型托板,其上具有供钩板竖向移动的开口;
24.第一伸缩单元,与l型托板连接,通过所述钩板竖向移动将粉状物药瓶的瓶口处盖片去除。
25.进一步地,所述第二开口单元还包括注液单元,用于向粉状物药瓶内注入溶解液,所述注液单元包括,
26.托环,其上具有凸出部;
27.第二伸缩单元,设于托环的凸出部上;
28.支架,与第二伸缩单元连接;
29.针管结构与输液管,所述针管结构设于支架上,通过所述输液管向针管结构中输入溶解液将粉状物药瓶内的粉状药物溶解。
30.进一步地,还包括收集单元,用于收集脱落的药瓶脱离物,所述收集单元包括,
31.收集篓,用于收纳脱落的药瓶脱离物;
32.转杆与驱动结构,所述收集篓与转杆连接,通过所述转杆带动收集篓转动至药瓶开口位置的正下方。
33.一种针剂药瓶的取药设备,涉及液体状药瓶、粉状物药瓶以及药盒,所述药盒具有盒体和盒盖,包括,
34.壳体,内部设有阶梯形台,且上表面开设有进物口;
35.传送单元,设于阶梯形台的低位置台面上,用于对药盒进行传送,包括传送带以及四根限位杆,单根所述限位杆穿过进物口一处转角处竖直插设;
36.如上述的取药机构,用于将药瓶从药盒内取出;
37.输出单元,设于阶梯形台的高位置台面上,用于将药瓶向外输出,包括直线电机与承载盒,所述承载盒上具有放置药瓶的瓶腔,所述承载盒通过直线电机向外移动输出。
38.进一步地,所述传送单元还包括开盒单元,设于传送带末端,用于将药盒的盒盖打开,所述开盒单元包括,
39.夹板与夹紧气缸,所述夹板从两侧将药盒夹持;
40.插片与第四动力单元,通过所述插片的水平移动插入盒体与盒盖的缝隙中;
41.转臂,与所述插片连接,用于带动插片转动翻开盒盖。
42.本发明的有益效果体现在:
43.本发明中,通过将放置于药盒内的针剂瓶取出,并将其由水平状态摆动至竖直状态,兼容后续的开口作业,实现自动化取药开口的工作,能够及时对所需配比的药液进行处理,能够应对住院药房的高强度输液需求,降低了医护人员的操作误差,也降低了医护人员
的劳动强度。
附图说明
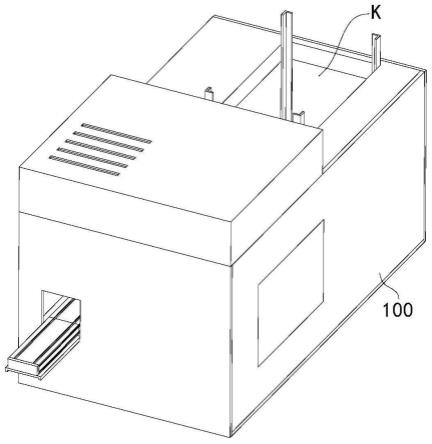
44.图1为本发明取药设备结构整体示意图;
45.图2为本发明取药设备内部结构示意图;
46.图3为本发明传送单元、取药机构、输出单元位置分布示意图;
47.图4为本发明取药机构结构示意图;
48.图5为本发明图4结构侧向剖面示意图;
49.图6为本发明第一、二开口单元结构整体示意图;
50.图7为本发明图6局部结构示意图;
51.图8为本发明传送单元结构示意图;
52.图9为本发明工作状态示意图。
53.附图标记说明:
54.100、壳体;101、阶梯形台;k、进物口;
55.200、传送单元;201、传送带;202、限位杆;203、夹紧气缸;204、夹板;205、插片;206、转臂;
56.300、夹爪;301、旋转夹紧气缸;302、支撑座;303、滚轮;304、u型架;305、矩形框;306、第二气缸;307、第一气缸;308、导轨;309、导向板;310、视觉识别单元;311、连接板;
57.400、环型导台;401、活动座;402、侧滚轮;403、砂轮片;404、推块;405、第一伸缩单元;406、钩板;407、l型托板;
58.408、托环;409、第二伸缩单元;410、支架;411、针管结构;412、输液管;
59.413、驱动结构;414、转杆;415、收集篓;
60.500、输出单元;501、直线电机;502、承载盒。
具体实施方式
61.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
62.需要说明,若本发明实施例中有涉及方向性指示(诸如上、下、左、右、前、后
……
),则该方向性指示仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
63.另外,若本发明实施例中有涉及“第一”、“第二”等的描述,则该“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。
64.请参阅图4和5,本发明一种针剂药瓶的取药机构,涉及液体状药瓶以及粉状物药瓶,包括,支撑座302;
65.夹爪300与旋转夹紧气缸301,设于支撑座302上,旋转夹紧气缸301驱使夹爪300开合夹取药瓶;
66.u型架304,u型架304与支撑座302横向滑动配合;
67.矩形框305,u型架304与矩形框305竖向滑动配合,u型架304于矩形框305上移动驱使夹爪300于竖直方向上移动将药瓶于药盒内取出;
68.滚轮303,设于支撑座302两侧;
69.导轨308,设于滚轮303正上方,滚轮303与导轨308间歇配合,配合时能够驱使夹爪300进行姿态的转换,导轨308被固定于横板上,滚轮303于导轨308上滚动驱使夹爪300由竖直状态摆动至水平状态将药瓶转移至开口向上方向;
70.视觉识别单元310,用于识别药瓶;为夹爪300夹取针剂瓶提供位置信息,采用现有技术,于多个公开专利中均以公开,例如专利号:cn210847257u的实用新型专利,本领域技术人员可直接进行使用;
71.驱动单元,用于提供动力输出,包括提供竖直方向以及水平方向的动力输出。
72.夹爪300初始状态处于竖直向下方向,此时滚轮303位于导轨308远离驱动单元的一端,驱动单元驱使u型架304沿着矩形框305向下移动,使得夹爪300靠近药盒内的针剂瓶,此时药盒处于打开状态,夹取后夹爪300向上复位,直至滚轮303与导轨308抵接,驱动单元再驱使支撑座302沿着u型架304做水平方向的移动,滚轮303于导轨308上向驱动单元方向滚动,带动支撑座302向上旋转摆动,进而使得被夹取的针剂瓶由水平状态摆动至竖直状态(请参阅图9),完成取药作业。
73.通过将放置于药盒内的针剂瓶取出,并将其由水平状态摆动至竖直状态,兼容后续的开口作业,实现自动化取药开口的工作,能够及时对所需配比的药液进行处理,能够应对住院药房的高强度输液需求,降低了医护人员的操作误差,也降低了医护人员的劳动强度。
74.在一实施例中,请参阅图4和图5,还包括导向板309,设于u型架304前侧,u型架304前端与导向板309滑动配合;用于提高u型架304在移动过程中的稳定性,具体的,导向板309上开设有滑槽,u型架304前端设有与导向板309配合的突出部,导向板309与滚轮303错位安装,且导向板309上端与矩形框305上端间隔设置。
75.其中,导向板309呈l型且与矩形框305等高度设置,具体的,导向板309由第一板(较长边)和第二板(较短边)组成,第二板滑动设于第一板上,且二者之间通过弹簧连接,为了避免在取药时,u型架304带动支撑座302以及夹爪300下移时,支撑座302受到导向板309阻挡的问题;且导向板309通过连接板311与矩形框305固定连接。
76.在一实施例中,请参阅图4,驱动单元包括用于驱使夹爪300竖向移动的第一气缸307以及驱使夹爪300由竖直状态摆动至水平状态的第二气缸306;第一气缸307和第二气缸306独立且依次工作,用于自动驱使夹爪300做竖向以及横向的移动,提高取药的效率。
77.在一实施例中,请参阅图6和图7,还包括第一开口单元,用于对液体状药瓶进行开口,第一开口单元包括,环型导台400;环型导台400上开设有环形槽,且环型导台400通过电滑轨滑块进行竖向移动;
78.活动座401与侧滚轮402,侧滚轮402通过电机驱动,活动座401与环型导台400滑动配合,侧滚轮402与环型导台400外环面贴合;
79.砂轮片403与第一动力单元,第一动力单元可采用气缸,设于活动座401上,活动座401沿着环型导台400移动驱使砂轮片403对液体状药瓶割口。
80.待夹爪300将液体状药瓶摆动至竖直状态后,环型导台400下移将液体状药瓶包围,第一动力单元驱使砂轮片403向液体状药瓶水平移动靠近并直至使其抵接,随后侧滚轮402于环型导台400外环面滚动,进而使得活动座401带动砂轮片403沿着液体状药瓶表面滚动,滚动的角度大于150
°
即可,砂轮片403移动过程中,第一动力单元始终对砂轮片403施加足够的压力,而不是只是保持砂轮片403与液体状药瓶表面贴合,进而完成对液体状药瓶的割口作业;
81.进一步的优选方案,为了提高割口质量,还可对砂轮片403添加驱动机构,使其在绕液体状药瓶公转的同时进行自转。
82.在一实施例中,请参阅图7,第一开口单元还包括设于砂轮片403上方的推块404与第二动力单元,第二动力单元可采用气缸,用于辅助被割口的液体状药瓶上部脱落,待液体状药瓶完成割口作业后,通过第二动力单元驱使推块404向液体状药瓶水平移动,对液体状药瓶割口处上部表面推动,辅助液体状药瓶上部脱落,避免因为割口作业后液体状药瓶上部未脱落导致开口未完全的问题。
83.在一实施例中,请参阅图7,还包括第二开口单元,用于对粉状物药瓶进行开口,第二开口单元包括,
84.钩板406与第三动力单元,第三动力单元可采用气缸,其中,上述的第一动力单元、第二动力单元和第三动力单元于同一竖直方向上安装,第一动力单元和第二动力单元之间通过支架连接,第三动力单元与第二动力单元之间通过下述的第一伸缩单元405连接;钩板406端部呈钩起状;
85.l型托板407,其上具有供钩板406竖向移动的开口;
86.第一伸缩单元405,第一伸缩单元405可采用电动伸缩杆,与l型托板407连接,通过钩板406竖向移动将粉状物药瓶的瓶口处盖片去除。
87.若夹取的是粉状物药瓶,待其摆动至竖直状态后,环型导台400下移至粉状物药瓶周围,第三动力单元驱使钩板406向粉状物药瓶水平靠近并与其上盖片的下沿抵接,随后通过第一伸缩单元405将钩板向上推动,钩板406前端将盖片向上掀掉,使得粉状物药瓶裸露出瓶口处的橡胶塞,为后续的注液工作做准备。
88.在一实施例中,请参阅图6,第二开口单元还包括注液单元,用于向粉状物药瓶内注入溶解液,注液单元包括,托环408,其上具有凸出部;
89.第二伸缩单元409,第二伸缩单元409可采用电动伸缩杆,设于托环408的凸出部上;
90.支架410,与第二伸缩单元409连接;
91.针管结构411与输液管412,输液管412与输液容器连接,输液容器内装有生理盐水,且通过泵送的方式向针管结构411输送;针管结构411设于支架410上,通过输液管412向针管结构411中输入溶解液将粉状物药瓶内的粉状药物溶解。
92.待粉状物药瓶上的盖片去除后,第二伸缩单元409带动针管结构411向粉状物药瓶移动并穿过橡胶塞伸入瓶内,随后通过输液管412注入适量的生理盐水,待针管结构411拔出后,通过旋转夹紧气缸301驱使夹爪300带动粉状物药瓶转动,使得粉状药物与生理盐水
充分融合,实现粉状药物的稀释溶解,降低医护人员的工作强度。
93.在一实施例中,请参阅图6,还包括收集单元,用于收集脱落的药瓶脱离物,收集单元包括,收集篓415,用于收纳脱落的药瓶脱离物;
94.转杆414与驱动结构413,驱动结构413可为电机,设于内置台(图中未标号)上,上述用于驱使环型导台400移动的电滑轨滑块也设于内置台上;收集篓415与转杆414连接,通过转杆414带动收集篓415转动至药瓶开口位置的正下方。
95.在对药瓶进行开口时,驱使转杆414带动收集篓415移动至夹爪下方,收集液体状药瓶上脱落的瓶口部以及粉状物药瓶上脱落的盖片,便于后续统一进行处理。
96.一种针剂药瓶的取药设备,请参阅图1、图2,和图3,涉及液体状药瓶、粉状物药瓶以及药盒,药盒具有盒体和盒盖,包括,
97.壳体100,内部设有阶梯形台101,且上表面开设有进物口k;壳体100侧面开设有供收集篓415转出的开口;壳体100表面开设有供处理后药瓶输出的输出口;
98.传送单元200,设于阶梯形台101的低位置台面上,用于对药盒进行传送,包括传送带201以及四根限位杆202,单根限位杆202穿过进物口k一处转角处竖直插设,且限位杆202与进物口k滑动连接,限位杆202底端与传送带201间隔设置;四根限位杆202用于对矩形药盒进行限位导向,使得药盒能够以统一的姿态落在传送带201上。
99.如上述的取药机构,用于将药瓶从药盒内取出;
100.输出单元500,设于阶梯形台101的高位置台面上,用于将药瓶向外输出,包括直线电机501与承载盒502,承载盒502上具有放置药瓶的瓶腔,承载盒502通过直线电机501向外移动输出。
101.医护人员将用于盛装待使用药瓶的药盒通过进物口k放入壳体100内,药盒在限位杆202的导向下以统一姿态落至传送带201,随后向前传送至取药工位,再通过取药机构将药瓶取出,取出进行开口处理后,将药瓶放置于输出单元500上向外输出;其中,若需取出多支药瓶时,可通过传送带201与取药机构的配合进行实现,即取药机构未安装于传送带201末端的上方,而是安装于传送带201的传送路径上方,使得药盒具有可再移动传送的可能性,进而使得取药机构能够将药盒内的多支药瓶依次取出。其中从药盒的进入、传送到位、取出药瓶、调节药瓶姿态、药瓶开口处理以及向外输出中每个动作的完成与否均通过传感器感知是否完成。
102.壳体100表面设有可打开的侧门,便于医护人员将药盒取出。
103.在一实施例中,请参阅图8,传送单元200还包括开盒单元,设于传送带201末端,用于将药盒的盒盖打开,传送带201末端还设有挡板;开盒单元包括,夹板204与夹紧气缸203,夹板204从两侧将药盒夹持;
104.插片205与第四动力单元,第四动力单元可采用气缸;通过插片205的水平移动插入盒体与盒盖的缝隙中;
105.转臂206,与插片205连接,转臂206通过电机驱动转动,转动的角度大于90
°
即可;用于带动插片205转动翻开盒盖。
106.当通过传送带201将药盒传送至指定位置,夹紧气缸203带动夹板204从两侧将药盒夹持,第四动力单元驱使插片205向药盒水平移动靠近,直至插片205插入盒体与盒盖的缝隙中,再通过转臂206带动插片转动,进而将盒盖打开,便于后续通过取药机构进行取药
瓶的动作。
107.进一步的优选技术方案,插片205两侧可设有气嘴,用于向盒体与盒盖的缝隙中吹送水平的高速气流,使得缝隙变大,进而便于插片205的无误差插入,提高开盖作业的准确性。
108.进一步的优选技术方案,为了适应不用尺寸药盒的开盖作业,插片205可设置成上下位置可调,具体可通过插片205、第四动力单元以及转臂206安装于可移动调节的基座上,基座可通过气缸控制调节移动。
109.以上仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。