1.本发明涉及定位领域,尤其涉及一种定位终端的保护水平修正方法、计算装置以及存储介质。
背景技术:
2.全球卫星导航系统(global navigation satellite system,gnss)可为全球用户提供全天候的实时定位、导航和授时服务,核心星座包括美国gps(global positioning system,gps)、中国北斗卫星导航系统(bds)、欧盟galileo(伽利略)、俄罗斯glonass(格洛纳斯)。在无增强信息辅助下,独立的单系统gnss伪距单点定位精度为5米左右。为满足测绘、自动驾驶、监测等领域对高精度定位的需求,需要对原始gnss测量误差进行改正,以实现厘米甚至毫米级的定位。当前,以自动驾驶为代表的高精定位用户普遍采用增强gnss与惯性导航和轮速计融合的方案。其中,高精度gnss的实现大多是基于rtk(real time kinematic,实时动态测量)或ppp-rtk(precise point positioning-rtk,精密单点定位ppp)技术,通过地面基准站生成gnss改正数据,根据用户实际需求提供高达厘米级的定位服务。
3.除精度外,完好性是另一大衡量导航性能的指标,它与可靠性和安全性关系最为密切。完好性的概念通常理解为:当导航系统不可用时及时向用户提供告警的能力,它反映的是对导航系统提供导航信息的正确性的信任程度。具体来讲,导航系统的异常通常是由于参与定位的测量或改正产品信息中出现故障造成的,这些故障会导致严重的定位偏差,威胁导航安全。广义上,gnss观测值或改正数据中出现超过正常幅值范畴的误差均应视为故障。按照gnss信号从产生到接收所处的不同阶段划分,导致测量故障产生的原因包括空间信号异常(如星历故障、星钟故障等)、大气活动异常(如电离层闪烁),以及定位终端所处的环境异常(如强多径、信号干扰、欺骗等)。而gnss改正数据产品的故障源更为复杂,包括站网接收机观测异常、通信链路异常、算法解算故障等等。从用户定位的角度看,由于所有可见卫星的观测值及其改正产品数据都参与定位解算,任何一颗卫星出现测量故障都可能对最终定位结果造成巨大影响。例如,2014年俄罗斯的glonass系统由于地球定向参数错误导致了长达14小时的星座故障,在此期间用户的定位结果比真实位置偏离数千公里。又比如,城市峡谷环境中部分卫星的观测值多径效应明显,可导致数十米的定位误差。因此,在实时定位服务中,及时检测并排除偶发的故障对于提高系统的服务质量、保障用户的导航安全具有重要意义。
4.在定位终端,完好性的实时监测结果通过输出告警状态以及计算保护水平(或完好性风险,protect level)进行量化。只有在无告警,且保护水平小于预设门限的情况下导航结果才置为可用。gnss完好性监测技术的发展主要受航空导航需求的驱使,旨在为飞机的自动驾驶系统提供安全可靠的导航解,并参与到飞机的控制回路中。近年来,以自动驾驶、自主载人飞行器为代表的各类自主无人系统吸引了学术界和工业界的高度兴趣,准确、可靠地确定自身位置和运动状态是实现无人系统轨迹跟踪、避碰等任务的基础能力之一。
由于自主系统的应用领域与生命安全高度相关,建立一套完善的gnss完好性监测体系是实现自主运行的前提。特别是对于现在广泛采用的基于增强gnss的高精度定位方案,自动驾驶用户将依靠其完好性输出进行路径规划和行为决策,这要求定位终端计算的保护水平必须十分准确、保守。
5.目前能够提供保护水平实时计算结果的量产定位终端主要应用在航空系统中。由于航空系统对导航精度的要求低,所以定位设备的完好性评估坚持“过保守,无风险”的原则,所计算的保护水平在数十米乃至上百米的量级。这虽然满足了航空安全标准,但由于所提供的安全区间范围过大,不适用于未来的自动驾驶应用。当前,面向自动驾驶的高精度定位终端的完好性监测普遍处于研发阶段,对于保护水平的求解主要采用两类方案。
6.第一类基于gnss算法内部的质量控制及检测信息,将协方差、周跳探测、raim(receiver autonomous integrity monitoring,即接收机自主完好性监控)检测等信息综合加权至保护水平计算中。这种方法虽然能一定程度上减少定位异常出现的次数,但是对强多径效应、接收机端的故障等变化敏感度低,容易导致保护水平结果失去保守性。此外,此类方案对于不同信息的权重设置是基于经验模型,无法精准的量化漏警、误警等事件,不能满足自动驾驶对于定位安全的苛刻要求。第二类求解保护水平的方案是通过设计新的检测算法来实现的,常见的检测算法包括多解分离检测,基于新息的检测,以及针对特定故障设计的专用检测器。这些检测器的检验统计量会计入保护水平的计算中,使得异常出现时能够通过放大保护水平保持定位解的安全性。然而,检测器的引入会大大增加算法复杂度,使得此类方案对算力的要求较高。以多解分离算法为例,它的实现要求同时运行数十个滤波器,也就是在算法部分需要消耗数十倍的算力,这对于计算资源本已十分紧张的嵌入式平台来说是灾难性的,无法实现实际的工程应用。
技术实现要素:
7.本发明的目的在于提供一种定位终端的保护水平修正方法、计算装置以及存储介质,其通过结合gnss定位终端的原始输出信息与定位算法,可以得到准确、保守、高效的修正保护水平。
8.为实现发明目的,根据本发明的一个方面,本发明提供一种定位终端的保护水平修正方法,其包括:基于gnss定位终端中的定位解状态、反映信号强度的载噪比、多径强度的n种组合分别创建对应的n个保护水平修正模型;计算得到原始保护水平;根据保护水平参考、所述原始保护水平、所述gnss定位终端中的伪距残差计算得到每个保护水平修正模型的修正参数,从而初始化所述n个保护水平修正模型;对初始化的n个保护水平修正模型进行验证和调整得到验证后的n个保护水平修正模型;和利用验证后的n个保护水平修正模型对所述原始保护水平进行修正得到修正保护水平,其中n大于等于4。
9.根据本发明的另一个方面,本发明提供一种计算装置,其包括处理器和存储器,所述存储器中存储有程序指令,该程序指令由处理器执行以实现上述保护水平修正方法。
10.根据本发明的再一个方面,本发明提供一种存储介质,其内存储有程序指令,该程序指令被执行以实现上述保护水平修正方法。
11.与现有技术相比,本发明利用gnss定位终端提供的信号层和接收机内部状态信息,对计算的保护水平进行实时修正,从而可以得到准确、保守、高效的修正保护水平。
附图说明
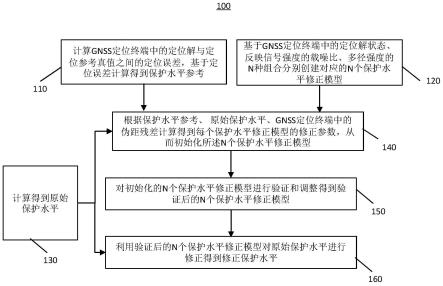
12.图1为本发明中的定位终端的保护水平修正方法在一个实施例中的流程示意图;
13.图2为本发明中的验证后的保护水平修正模型序列进行保护水平修正的示意图。
具体实施方式
14.为更进一步阐述本发明为达成预定发明目的所采取的技术手段及功效,以下结合附图及较佳实施例,对依据本发明的具体实施方式、结构、特征及其功效,详细说明如下。
15.本发明基于上述第一类现有技术,基本原理是利用gnss芯片(或称gnss定位终端)提供的信号层和接收机内部状态信息,对算法计算的保护水平进行实时修正。由于芯片内部可以获得更为底层的反应观测环境、跟踪和捕获情况、基带状态的原始信息,以此获得的数据处理结果可靠性好,其变化趋势与最终定位误差变化趋势一致性高。目前,大多数芯片厂商会将底层信息通过播发检测值、设置健康标志位等形式提供给终端用户,这类信息包括信号强度、多径强度、观测值残差、信号跟踪状态、干扰和欺骗告警等。在本发明中,通过后处理拟合方式,分状态、分环境建立实际误差、实时计算的保护水平、芯片输出信息之间的数学关系,经过数据验证后可直接在原有算法中实现,不产生明显的对计算资源的额外消耗。
16.本发明要解决的是高精度定位终端的保护水平求解问题,旨在通过结合gnss芯片的原始输出信息与定位算法,提出一种准确、保守、高效的保护水平实时修正方法。受多种因素的综合影响,基于增强gnss的高精度定位终端所获取的观测值和改正产品中容易出现故障,导致定位异常,严重威胁导航安全。因此,准确的求解保护水平对于生命安全相关的导航应用至关重要,是实现自动驾驶等自主运行的必要条件。
17.图1为本发明中的定位终端的保护水平修正方法100在一个实施例中的流程示意图。如图1所示的,所述定位终端的保护水平修正方法包括如下操作。
18.步骤110,计算gnss定位终端输出的定位解与定位参考真值之间的定位误差,基于所述定位误差计算得到保护水平参考。
19.在一个实施例中,将定位参考系统与所述gnss定位终端相对固定并移动,利用所述gnss定位终端和所述定位参考系统进行定位测量,利用后处理软件(如inertial explorer)处理所述定位参考系统的原始测量数据和改正数据,得到所述定位参考真值。所述定位参考系统可以是专业的、昂贵的定位系统,其定位测量的数据可以被认为是准确的、可靠的定位数据。所述定位误差为所述gnss定位终端输出的定位解与所述定位参考真值的差。
20.在一个实施例中,所述保护水平参考为所述定位误差与预定参考系数的乘积。比如,所述预定参考系数为5.32。
21.当然,在其他实施例中还可以利用其他可能的方法来计算所述保护水平参考。
22.步骤120,为gnss定位终端中的定位解状态、反映信号强度的载噪比cn0、多径强度的n种组合分别创建对应的n个保护水平修正模型。n为大于等于4的正整数。
23.在一个实施例中,所述定位解状态包括h种、所述载噪比被分为m种,所述多径强度分为n种,针对h种定位解状态、m种载噪比和n种多径强度的每种组合设置一个保护水平修正模型,共计得到h*m*n个保护水平修正模型,n=h*m*n,h、m、n为大于等于1的正整数。
24.更为具体的,h=4,m=2,n=3,n=24,所述定位解状态分为standard point positioning(spp,标准单点定位)、real time differential(rtd,实时差分)、real time kinematics(rtk)
–
float(浮点)、rtk-fix(固定)四种,所述载噪比cn0按照预定强度为界分为低和高两种,其中小于所述预定强度的载噪比被认为是低,大于等于所述预定强度的载噪比被认为是高。比如,所述预定强度为30db。所述多径强度分为高中低三种。这样,所述定位解状态、所述载噪比cn0、所述多径强度共计有24种组合,因此创建24个保护水平修正模型。24个保护水平修正模型形成保护水平修正模型序列,i为保护水平修正模型的序号,i=1,
……
,n。
25.步骤130,计算得到原始保护水平。
26.在一个实施例中,可以按照现有技术中的第一类保护水平计算方法来计算所述原始保护水平。即,基于gnss算法内部的质量控制及检测信息,根据协方差、周跳探测、raim(receiver autonomous integrity monitoring,即接收机自主完好性监控)检测等信息的综合加权计算原始保护水平。
27.当然,还可以利用其他现有技术来计算所述原始保护水平。
28.步骤140,根据保护水平参考、所述原始保护水平、所述gnss定位终端中的伪距残差计算得到每个保护水平修正模型的修正参数,从而初始化所述n个保护水平修正模型。
29.在一个实施例中,对于每个保护水平修正模型,统计出此保护水平修正模型下的所有原始保护水平的结果和所述gnss定位终端中的伪距残差的结果,使用如下公式进行拟合,计算得到每个保护水平修正模型的修正参数
[0030][0031]
其中pl
des
为期望的保护水平参考;pl
raw
为原始保护水平;res为基于gnss定位终端中(比如gnss芯片输出)的伪距残差,i为每个保护水平修正模型序号,i=1,...n,
[0032]
令
[0033]
利用最小二乘法,得到修正参数的解为:
[0034]
x=(h
t
h)-1htz[0035]
其中,角标t1...t
all
对应的是数据点的所有历元(all是历元数目)。
[0036]
为了使结果更加准确有代表性,每种保护水平修正模型的修正参数都需要使用大量的数据点进行计算。
[0037]
得到每个保护水平修正模型的修正参数后,意味着这个保护水平修正模型已经被初始化。
[0038]
步骤150,对初始化的n个保护水平修正模型进行验证和调整得到验证后的n个保护水平修正模型。
[0039]
在一个实施例中,利用初始化的n个保护水平修正模型反求一遍修正保护水平,然后对漏警率、误导信息进行分析,如果修正保护水平的结果没有达到预期指标,则根据实际情况对每个保护水平修改模型的修正参数进行调整。举例来说,若新求解的修正保护水平整体比保护水平参考小,则增大修正参数的值;若在定位误差突然变大时保护水平未出现明显变大,则增大修正参数的值。
[0040]
具体的,验证后的每个保护水平修正模型可以表示为:
[0041][0042]
其中pl
cor
为修正保护水平。
[0043]
通过步骤110-150,可以获得验证后的n个保护水平修正模型。
[0044]
步骤160,利用验证后的n个保护水平修正模型对所述原始保护水平进行修正得到修正保护水平,其中n为大于等于4的正整数。
[0045]
在一个实施例中,结合参考图2所示的,获得gnss定位终端中的单一历元下的一组载噪比cn0、多径强度、伪距残差,获得gnss定位终端中的定位解状态;根据获得的载噪比cn0、多径强度以及定位解状态从验证后的n个保护水平修正模型中选择对应的一个保护水平修正模型x;利用选择的验证后的一个保护水平修正模型x根据获得的伪距残差对所述原始保护水平进行修正得到修正保护水平。
[0046]
更为具体的,所述获得gnss定位终端中的单一历元下的一组载噪比cn0、多径强度、伪距残差包括:在一个历元,gnss定位终端收到m个观测值,则在该历元下有m组载噪比cn0、多径强度和伪距残差数据;将该历元下的所有载噪比cn0排列,取序列的预定位置处对应的载噪比cn0作为该历元的载噪比cn0结果;将该历元下的所有多径强度排列,取序列的预定位置处对应的多径强度作为该历元的多径强度结果;将该历元下的所有伪距残差排列,取序列的预定位置处对应的伪距残差作为该历元的伪距残差,其中m为大于等于1的正整数。举例来说,将该历元下的所有载噪比cn0按降序排列,取排列中的75%处对应的cn0作为该历元的cn0结果;将该历元下的所有伪距残差、所有多径强度按照升序排列。
[0047]
本发明的核心之一在于建立保护水平修正模型,确定最终版本的保护水平修正模型后,用户将按照如下流程使用:根据当前的定位解状态、观测信号的载噪比cn0、多径强度判断所需采用的保护水平修正模型种类,从预先存储的保护水平修正模型序列中提取相对应的保护水平修正模型,遵照数学公式完成对实时输出的保护水平的修正。
[0048]
与上述现有技术相比,本发明有两大进步:
[0049]
1、提高了保护水平求解的准确性和可靠性。由于新方案在求解保护水平时引入了gnss芯片输出的底层信息,可以更好的反映出信号层状态和运行环境变化情况,使得保护水平能更好的反应出定位异常。
[0050]
2、不造成计算资源消耗的增加,易于工程实现。由于本方案的实时运行是基于已有信息,只需判断模型种类和进行一步修正即可,对算力的要求可以忽略。
[0051]
根据本发明的另一个方面,本发明提供一种计算装置,其包括处理器和存储器,所述存储器中存储有程序指令,该程序指令由处理器执行以实现上述保护水平修正方法。
[0052]
根据本发明的再一个方面,本发明提供一种存储介质,其内存储有程序指令,该程序指令被执行以实现上述保护水平修正方法。
[0053]
在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,除了包含所列的那些要素,而且还可包含没有明确列出的其他要素。
[0054]
在本文中,所涉及的前、后、上、下等方位词是以附图中零部件位于图中以及零部件相互之间的位置来定义的,只是为了表达技术方案的清楚及方便。应当理解,所述方位词的使用不应限制本技术请求保护的范围。
[0055]
在不冲突的情况下,本文中上述实施例及实施例中的特征可以相互结合。
[0056]
以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。