1.本发明涉及车辆用制动装置。
背景技术:
2.车辆用制动装置有具备通过电动马达使活塞移动而产生液压的液压产生装置(例如,电动气缸)的装置。在电动气缸中,在结构上,可能存在相对于电动马达的驱动不产生液压的无效行程。这里,例如在日本专利5856021号说明书公开了一种考虑复位区间来设定成为液压产生的起点的原点位置所涉及的马达的旋转角度的技术。
3.专利文献1:日本专利5856021号说明书
4.然而,在上述车辆用制动装置中,基于与电动马达的旋转角度相关的固定值(原点位置信息、复位区间信息)来进行控制,例如由于电动马达的输出误差、直动机构的误差、马达旋转角度传感器的检测误差、或者外部气温的高低等,有在基于固定值的控制位置与实际的活塞的位置之间产生偏差的可能性。
技术实现要素:
5.本发明的目的在于提供一种能够高精度地推断切换电动气缸等加压部与储存器的连接状态的活塞的切换位置的车辆用制动装置。
6.本发明的车辆用制动装置具备:储存器;第一加压部,具有气缸、能够在上述气缸内滑动的活塞、驱动上述活塞的电动马达、以及由上述气缸和上述活塞划分且容积根据上述活塞的移动而变化的输出室,该第一加压部构成为上述输出室与上述储存器的连接状态根据上述活塞的位置在连通状态和切断状态之间切换,并且通过上述活塞向轴向一方移动而上述输出室的容积减少,从而能够对流体加压;压力传感器,检测上述输出室的压力;以及推断部,执行位置推断处理,该位置推断处理是使上述活塞移动并且基于上述压力传感器的检测值推断切换上述输出室与上述储存器的连接状态的上述活塞的切换位置。
7.根据本发明,在输出室与储存器是连通状态的情况下,即使活塞移动,在输出室也不产生液压。另一方面,在输出室与储存器是切断状态的情况下,输出室的液压根据活塞的移动而变化。在加压时,若活塞23超过切换位置,则压力传感器的检测值从0(储存器的液压)开始上升。在减压时,若超过切换位置,则压力传感器的检测值为0。
8.在位置推断处理中,推断部能够通过在使活塞移动的同时监视压力传感器的检测值,检测如上述那样的输出室的液压变化,来推断活塞的切换位置。由于活塞的切换位置基于实际的液压变化推断,所以能够获取与位置推断处理执行时的车辆状况相应的切换位置。像这样,根据本发明,能够高精度地推断切换输出室与储存器的连接状态的活塞的切换位置。
附图说明
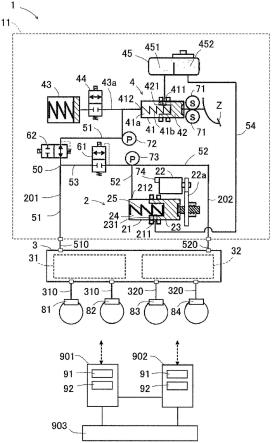
9.图1是本实施方式的车辆用制动装置的结构图。
10.图2是用于对本实施方式的活塞的切换位置进行说明的概念图。
11.图3是本实施方式的致动器的结构图。
12.图4是表示本实施方式的具体例1的控制的流程的流程图。
13.图5是表示本实施方式的具体例1中的液压的变化的概念图。
14.图6是表示本实施方式的具体例2的控制的流程的流程图。
15.图7是表示本实施方式的具体例2中的液压的变化的概念图。
16.图8是本实施方式的变形例的结构图。
具体实施方式
17.以下,基于附图对本发明的实施方式进行说明。说明所使用的各图是概念图。如图1所示,本实施方式的车辆用制动装置1具备上游单元11、构成下游单元的致动器3、第一制动ecu901、第二制动ecu902以及电源装置903。上游单元11构成为能够对下游单元供给基础液压。
18.上游单元11具备电动气缸(相当于“第一加压部”)2、主缸单元4、储存器45、第一液路51、第二液路52、连通路53、制动液供给路54、连通控制阀61以及主截止阀62。第一制动ecu901至少控制上游单元11。第二制动ecu902至少控制致动器3。此外,图1表示车辆用制动装置1的非通电状态。
19.(电动气缸)
20.电动气缸2是与储存器45连接,能够对轮缸81、82、83、84加压的加压单元(调压单元)。轮缸81、82是第一系统的轮缸,轮缸83、84是第二系统的轮缸。配管的连接例如可以是对于前轮配置第一系统,对于后轮配置第二系统的前后配管。另外,配管的连接也可以是对于第一系统以及第二系统分别配置前轮和后轮的交叉配管。
21.电动气缸2具有气缸21、电动马达22、活塞23、输出室24以及施力部件25。电动马达22经由将旋转运动转换为直线运动的直动机构22a与活塞23连接。电动气缸2是在气缸21内形成有单个输出室24的单体型的电动气缸。
22.活塞23通过电动马达22的驱动在气缸21内在轴向上滑动。活塞23形成为在轴向一侧开口在轴向另一侧具有底面的有底圆筒状。换句话说,活塞23具备形成开口的筒状部分和形成底面(受压面)的圆柱部分。
23.输出室24由气缸21和活塞23划分,容积根据活塞23的移动而变化。输出室24与储存器45以及致动器3连接。如图2所示,活塞23在轴向上在包含输出室24的容积最小的位置和输出室24的容积最大的位置的滑动区域r内滑动。滑动区域r由使输出室24与储存器45之间连通的连通区域r1和切断输出室24与储存器45之间的切断区域r2构成。连通区域r1包含输出室24的容积最大的活塞23的初始位置。切断区域r2包含输出室24的容积最小的活塞23的位置。在轴向上,切断区域r2大于连通区域r1。此外,在图2中,各区域r、r1、r2以活塞23的轴向一端(前端)的位置为基准来表示。
24.更详细而言,在气缸21形成有输入端口211以及输出端口212。输出端口212使输出室24与第二液路52连通。在活塞23位于初始位置时,输入端口211与活塞23的筒状部分重叠。在活塞23的筒状部分形成有通孔231。在活塞23位于初始位置的情况下,通孔231形成在与输入端口211对置的位置(重叠的位置)。
25.在输入端口211与通孔231重叠的状态下,输出室24与储存器45连通。通过活塞23向轴向一侧移动,从而输入端口211与通孔231重叠的宽度减少。若输入端口211和通孔231成为不重叠的状态,则输出室24与储存器45之间被切断。
26.在气缸21设置有密封部件x1、x2(参照图2)。输入端口211形成在密封部件x1与密封部件x2之间。密封部件x1是环状的杯形密封件。在活塞23的基准位置位于切断区域r2的状态(切断状态)下,密封部件x1禁止从输出室24向储存器45的流体的流通,允许从储存器45向输出室24的流体的流通。
27.重叠距离(通孔231和/或输入端口211的轴向的宽度)越大,连通区域r1越大。在本实施方式中,输入端口211和通孔231具有相同等级的轴向宽度。在活塞23向轴向一侧移动时,连通区域r1持续到活塞23从初始位置移动规定量(重叠距离)为止。规定量相当于初始位置与切换位置的分离距离。施力部件25是配置于输出室24,向轴向另一侧(朝向初始位置)对活塞23施力的弹簧。
28.连通区域r1是活塞23的初始位置与切换位置之间的区域。如图2所示,若活塞从初始位置向轴向一侧移动并到达切换位置,则通孔231与输入端口211的重叠消失,输出室24与储存器45的连接状态从连通状态切换为切断状态。换句话说,可以说电动气缸2处于在输出室24产生液压的液压产生状态。相反地,在切断状态(液压产生状态)下,若活塞23向轴向另一侧移动并到达切换位置,则通孔231和输入端口211开始重叠,连接状态从切断状态切换至连通状态。
29.(致动器)
30.致动器3是具备第一液压输出部31和第二液压输出部32的调压单元(下游单元),其中,第一液压输出部31构成为能够对轮缸81、82进行调压,第二液压输出部32构成为能够对轮缸83、84进行调压。致动器3与电动气缸2连接。
31.第一液压输出部31构成为通过在被输入的液压与轮缸81、82的液压之间产生差压来对轮缸81、82加压。同样地,第二液压输出部32构成为通过在被输入的液压与轮缸83、84的液压之间产生差压来对轮缸83、84加压。
32.致动器3是所谓的esc致动器,能够独立地对各轮缸81~84的液压进行调压。致动器3根据第二制动ecu902的控制,来执行例如防滑控制(也被称为abs控制)、防侧滑控制(esc)、或者牵引力控制等。第一液压输出部31和第二液压输出部32在致动器3的液压回路上相互独立。对于致动器3的结构后述。
33.(主缸单元)
34.主缸单元4是与储存器45连接,根据制动操作部件z的操作量(行程和/或踏力)机械式地对致动器3的第一液压输出部31供给制动液的单元。主缸单元4和电动气缸2能够相互独立地产生液压。主缸单元4构成为能够经由第一液压输出部31对轮缸81、82加压。主缸单元4具备主缸41和主活塞42。
35.主缸41是有底圆筒状的部件。在主缸41形成有输入端口411和输出端口412。主活塞42是根据制动操作部件z的操作量在主缸41内滑动的活塞部件。主活塞42形成为在轴向一侧开口并在轴向另一侧具有底面的有底圆筒状。
36.在主缸41内,通过主活塞42形成单个主室41a。换言之,在主缸41,通过主缸41和主活塞42形成主室41a。主室41a的容积根据主活塞42的移动而变化。若主活塞42向轴向一侧
移动,则主室41a的容积减小,主室41a的液压(以下,称为“主压”)增大。在主室41a设置有朝向初始位置(向轴向另一侧)对主活塞42施力的施力部件41b。本实施方式的主缸单元4是单体型的主缸单元。
37.输出端口412使主室41a与第一液路51连通。输入端口411经由形成于主活塞42的筒状部分的通孔421,使主室41a与储存器45连通。在主室41a的容积最大的主活塞42的初始位置,输入端口411与通孔421重叠,主室41a与储存器45连通。若主活塞42从初始位置向轴向一侧移动规定量(重叠距离),则主室41a与储存器45的连接被切断。
38.在主缸单元4设置有行程模拟器43以及模拟器截止阀44。行程模拟器43是对于制动操作部件z的操作产生反作用力(负荷)的装置。若制动操作被解除,则通过施力部件41b将主活塞42返回到初始位置。行程模拟器43例如由气缸、活塞以及施力部件构成。行程模拟器43与主缸41的输出端口412通过液路43a连接。模拟器截止阀44是设置于液路43a的常闭型的电磁阀。
39.(液路和电磁阀)
40.第一液路51连接主室41a与第一液压输出部31。第二液路52连接电动气缸2与第二液压输出部32。连通路53连接第一液路51与第二液路52。
41.连通控制阀61是设置于连通路53的常闭型的电磁阀。连通控制阀61允许或者禁止电动气缸2对第一液压输出部31供给制动液。连通控制阀61为了防止闭阀时的从轮缸81、82向电动气缸2的制动液的逆流,而比阀座靠轮缸81、82侧(第一系统侧)配置有阀体。由此,即使在连通控制阀61闭阀时,轮缸81、82的液压比电动气缸2的输出液压高,也在按压于阀座的方向上对阀体施加力(被自密封),因此维持闭阀。
42.主截止阀62是设置于第一液路51中的第一液路51和连通路53的连接部50与主缸41之间的常开型的电磁阀。主截止阀62允许或者禁止从主缸单元4向第一液压输出部31供给制动液。
43.制动液供给路54连接储存器45与电动气缸2的输入端口211。储存器45存积制动液,将内部的压力保持为大气压。另外,储存器45的内部被划分为分别存积制动液的两个腔室451、452。储存器45的一个腔室451与主缸单元4连接,另一个腔室452经由制动液供给路54与电动气缸2连接。储存器45也可以不是由两个腔室构成,而是由两个独立的储存器构成。
44.(结构总结)
45.电动气缸2具有气缸21、能够在气缸21内滑动的活塞23、驱动活塞23的电动马达22、以及由气缸21和活塞23划分且容积根据活塞23的移动而变化的输出室24,构成为通过活塞23的移动而输出室24的容积减少从而能够对流体加压。车辆用制动装置1具备电动气缸2和与输出室24连接的储存器45,且构成为输出室24与储存器45的连接状态根据活塞23的位置在连通状态和切断状态之间切换。
46.(致动器的构成例)
47.对于致动器3的构成例,以与轮缸81连接的液路为例进行简单说明。如图3所示,致动器3的第一液压输出部31主要具备液路311、差压控制阀312、保持阀(相当于“电磁阀”)313、减压阀314、泵315、电动马达316以及储存器317。
48.液路311连接第一液路51与轮缸81。在液路311设置有压力传感器75。差压控制阀
312是常开型的线性电磁阀。通过控制差压控制阀312的开度(基于电磁力的向闭阀侧的力),能够在上下游间产生差压。与差压控制阀312并列地设置仅允许从第一液路51向轮缸81的制动液的流通的止回阀312a。
49.保持阀313是设置在液路311中的差压控制阀312与轮缸81之间的常开型的电磁阀。另外,止回阀313a与保持阀313并列地设置。减压阀314是设置于减压液路314a的常闭型的电磁阀。减压液路314a连接液路311中的保持阀313与轮缸81之间的部分和储存器317。
50.泵315通过电动马达316的驱动力工作。泵315设置于泵液路315a。泵液路315a连接液路311中的差压控制阀312与保持阀313之间的部分(以下,称为“分支部x”)和储存器317。若泵315工作,则储存器317内的制动液被排出到分支部x。
51.储存器317是调压储存器。回流液路317a连接第一液路51和储存器317。储存器317构成为通过泵315的工作,优先吸入储存器317内的制动液,若储存器317内的制动液减少,则开阀并经由回流液路317a从第一液路51吸入制动液。
52.在通过致动器3对轮缸81加压的情况下,第二制动ecu902对差压控制阀312施加与目标差压(轮缸81的液压>第一液路51的液压)相应的控制电流,使差压控制阀312闭阀。此时,保持阀313开阀,减压阀314闭阀。另外,由于泵315工作,而从第一液路51经由储存器317向分支部x供给制动液。由此,轮缸81被加压。
53.若轮缸81的液压(以下,称为“第一轮压”)与第一液路51的液压之差变得高到超过目标差压,则由于力的大小关系而差压控制阀312开阀。加压后的第一轮压为第一液路51的液压与目标差压之和。像这样,致动器3通过在电动气缸2的输出液压与第一轮压之间产生差压,来对轮缸81加压。其他轮缸82、83、84的加压也同样。
54.第二制动ecu902在因防滑控制等通过致动器3对第一轮压进行减压的情况下,在使减压阀314开阀并且使保持阀313闭阀的状态下使泵315工作,使轮缸81内的制动液泵回。在通过致动器3保持第一轮压的情况下,第二制动ecu902使保持阀313以及减压阀314闭阀。在仅通过电动气缸2或者主缸单元4的工作对第一轮压进行加压或者减压的情况下,第二制动ecu902使差压控制阀312以及保持阀313开阀,并使减压阀314闭阀。
55.第二液压输出部32的结构由于与第一液压输出部31相同,所以省略说明。另外,相当于第一液压输出部31的液路311的第二液压输出部32的液路321将第二液路52与轮缸83、84连接。像这样,第二液压输出部32具备与液路311相当的液路321、与差压控制阀312相当的差压控制阀322、与保持阀313相当的保持阀323、与减压阀314相当的减压阀324、与泵315相当的泵325、以及与储存器317相当的储存器327。致动器3与电动气缸2独立地构成为能够对轮缸81~84加压。此外,以下,在说明中,将轮缸81~84的液压也称为轮压。
56.(制动ecu以及各种传感器)
57.第一制动ecu901以及第二制动ecu902(以下,也称为“制动ecu901、902”)分别是具备cpu、存储器的电子控制单元。各制动ecu901、902具备执行各种处理(控制)的一个或者多个处理器。第一制动ecu901和第二制动ecu902是分立的ecu,连接为相互可通信信息(控制信息等)。
58.第一制动ecu901可控制地与电动气缸2以及各电磁阀61、62、44连接。第二制动ecu902可控制地与致动器3连接。各制动ecu901、902基于各种传感器的检测结果来执行各种控制。作为各种传感器,在车辆用制动装置1例如设置有行程传感器71、压力传感器72、
73、75、旋转角传感器74、车轮速度传感器(省略图示)、横摆率传感器(省略图示)、以及加速度传感器(省略图示)等。
59.行程传感器71检测制动操作部件z的行程。在车辆用制动装置1,以与各制动ecu901、902一对一地对应的方式设置有两个行程传感器71。制动ecu901、902分别从对应的行程传感器71获取行程信息。压力传感器72是检测主压的传感器,例如设置于第一液路51中的比主截止阀62靠主缸41侧的部分。压力传感器73是检测电动气缸2的输出液压即输出室24的压力的传感器,例如设置于第二液路52。旋转角传感器74针对电动气缸2的电动马达22来设置,检测电动马达22的旋转角(旋转位置)。压力传感器75检测从第一液路51向第一液压输出部31的输入液压。也可以向制动ecu901、902双方发送各种传感器的检测值。
60.第一制动ecu901接收行程传感器71、压力传感器72、73以及旋转角传感器74的检测结果,并基于该检测结果来控制电动气缸2以及各电磁阀61、62、44。第一制动ecu901能够基于压力传感器72、73的检测结果以及致动器3的控制状态来运算各轮压。
61.第二制动ecu902接收行程传感器71以及压力传感器75的检测结果,并基于该检测结果来控制致动器3。第二制动ecu902能够基于压力传感器75以及致动器3的控制状态来运算各轮压。第二制动ecu902设定第一差压(输入压与轮缸81、82的液压的差压)的目标值亦即第一目标差压、以及第二差压(输入压与轮缸83、84的液压的差压)的目标值亦即第二目标差压。
62.电源装置903是向各制动ecu901、902供给电力的装置。电源装置903具备蓄电池。电源装置903与制动ecu901、902双方连接。换句话说,在本实施方式中,从共用的电源装置903向两个制动ecu901、902供给电力。
63.(位置推断处理)
64.第一制动ecu901具备执行位置推断处理的推断部91。位置推断处理是使活塞23移动,并且基于压力传感器73的检测值推断切换输出室24与储存器45的连接状态的活塞23的切换位置的处理。
65.推断部91在规定的定时执行位置推断处理。推断部91在位置推断处理中,使活塞23从初始位置向轴向一方移动,将压力传感器73的检测值为阈值以上时的旋转角传感器74的检测值存储为切换位置(加压时切换位置)。另外,推断部91使活塞23相对于通过位置推断处理成为液压产生状态的电动气缸2向轴向另一方移动,将压力传感器73为阈值以下时的旋转角传感器74的检测值存储为切换位置(减压时切换位置)。推断部91在位置推断处理中,存储加压时切换位置以及减压时切换位置中的至少一方即可。推断部91也可以对切换位置信息施加基于活塞23的移动方向的修正。
66.位置推断处理例如在车辆停止没有轮压也能够维持停车的状态时(例如,epb驾驶时、变速杆为p档时)、或者车辆行驶时(未进行制动操作时)被执行。
67.(位置推断处理的效果)
68.根据本实施方式,在输出室24与储存器45是连通状态的情况下,即使活塞23移动,在输出室24中也不产生液压。另一方面,在输出室24与储存器45为切断状态的情况下,输出室24的液压根据活塞23的移动而变化。在加压时,若超过切换位置,则压力传感器73的检测值从0(储存器45的液压)开始上升。在减压时,若超过切换位置,则压力传感器73的检测值为0。
69.推断部91在位置推断处理中,能够通过在使活塞23移动的同时监视压力传感器73的检测值,检测如上述那样的输出室24的液压变化(相对于0的变化),来推断活塞的切换位置。由于基于实际的液压变化推断活塞23的切换位置,所以能够获取与执行位置推断处理时的车辆状况相应的切换位置。推断部91例如将电动马达22的旋转位置的信息(旋转角信息)存储为切换位置的信息。例如,能够根据电动马达22的旋转位置和直动机构22a的传动比来运算活塞23的位置。像这样,根据本实施方式,能够高精度地推断切换电动气缸2的输出室24与储存器45的连接状态的活塞23的切换位置。
70.(刚度变更处理)
71.第二制动ecu902具备刚度变更部92。在由推断部91执行位置推断处理时,刚度变更部92执行提高输出室24的刚度的刚度变更处理。输出室24的刚度是使输出室24变化单位容积的情况下的液压变化量。输出室24的刚度也可以说是在使输出室24减小单位容积时增大的液压量。输出室24的刚度越高,在使输出室24减小单位容积时增大的液压量越大。
72.输出室24的刚度受到连接输出室24与轮缸81~84的输出液路201、202的容积以及轮缸81~84的刚度的影响。作为输出室24的刚度升高的事例,例如,是轮缸81~84的刚度升高的情况或者输出液路201、202的容积减小的情况等。
73.输出液路201由第二液路52的一部分、连通路53、第一液路51的一部分以及液路311构成。输出液路202由第二液路52以及液路321构成。当轮压为初始区域内的值的情况下(0≤轮压≤规定压),轮缸81~84的刚度低于输出液路201、202的刚度。因此,在低压区域,输出室24的刚度受到轮缸81~84的刚度的影响。轮缸81~84的刚度(液压变化量/容积变化量)根据轮压变化。
74.(刚度变更处理的具体例1)
75.作为刚度变更处理的具体例1,刚度变更部92通过致动器3对轮缸81~84加压。在推断部91执行位置推断处理之前,刚度变更部92控制致动器3对轮缸81~84供给流体。致动器3对轮缸81~84的加压如上述那样,通过对差压控制阀312、322供给控制电流,并且使泵315、325工作来执行。由此,轮压升高,轮缸81~84的刚度升高,输出室24的刚度也升高。
76.更详细而言,如图4所示,制动ecu901、902执行加压处理s101、第一移动处理s102、连通处理s103、第二移动处理s104以及检测处理s105。首先,若执行刚度变更处理,则差压控制阀312、322根据目标差压闭阀,轮缸81~84通过泵315、325的工作而被加压(s101)。
77.相对于输出室24的容积减少量的输出室24的液压增大量(增大梯度)与执行加压处理s101前相比陡峭。换句话说,输出室24的刚度提高。
78.推断部91在差压控制阀312、322的上下游间的差压达到目标差压之后(加压处理s101完成后),使电动马达22驱动而使电动气缸2的活塞23从初始位置向轴向一方移动(s102)。若活塞23在连通区域r1移动并超过切换位置进入切断区域r2,则输出室24的液压上升,在轮缸81~84中产生对输出室24的液压加上差压控制阀312、322的目标差压所得的液压。此外,推断部91也可以存储压力传感器73的检测值(输出室24的液压)超过阈值时的电动马达22的旋转位置,但在本例中存储在减压时检测的切换位置。
79.推断部91在第一移动处理s102中,使活塞23移动规定量并停止。换言之,若轮压达到目标轮压,则推断部91使活塞23停止。而且,刚度变更部92停止泵315、325,停止向差压控制阀312、322供给控制电流使差压控制阀312、322开阀(目标差压=0)(s103)。由此,相对高
压的轮缸81~84和相对低压的输出室24连通,流体流入到输出室24。通过流体的流入,输出室24的液压上升,由于该液压上升而活塞23被向轴向另一方推回。在输出室24中产生与轮压相当的液压,即通过致动器3提高的液压。
80.推断部91在液压被提高的状态下,降低电动马达22的输出(转矩),使活塞23向轴向另一方移动(s104)。由此,如图5所示,被提高的输出室24的液压缓缓地降低。而且,若输出室24与储存器45的连接状态从切断状态切换为连通状态,则输出室24与大气压的储存器45连通,流体以较高的流速流出到储存器45。由此,被提高的输出室24的液压一下子降低到0,压力传感器73的检测值低于用于检测(判定)切换位置的阈值。
81.推断部91检测压力传感器73的检测值成为阈值(阈值以下)的时刻,并存储此时的旋转角传感器74的检测值(s105)。换句话说,推断部91存储与压力传感器73的检测值成为阈值时的活塞23的位置对应的电动马达22的旋转位置。在压力传感器73的检测值成为阈值时,推断部91推断为活塞23位于切换位置,并存储与该位置相关的信息。
82.像这样,具体例1的位置推断处理包含:使活塞23向轴向一方移动的第一移动处理s102、在第一移动处理s102后使活塞23向轴向另一方移动的第二移动处理s104、以及在第二移动处理中基于压力传感器73的检测值来检测切换位置的检测处理s105。另外,刚度变更部92在第一移动处理s102之前在切断了轮缸81~84与输出室24的状态下通过致动器3对轮缸81~84加压(加压处理s101),在第二移动处理s104之前使轮缸81~84与输出室24连通(连通处理s103)。通过执行连通处理s103,在输出室24中产生与轮压相当的液压。加压处理s101和连通处理s103也可以说是在第二移动处理s104之前提高输出室24的液压的提高处理。
83.(具体例1的效果)
84.根据具体例1,通过加压处理s101对轮缸81~84加压。之后,通过第一移动处理s102来切断输出室24与储存器45的连接状态。在通过连通处理s103将轮缸81~84与输出室24的连接状态从切断状态切换为连通状态时,输出室24的液压被提高,活塞23向轴向另一方移动并即将到达切换位置之前的输出室24的液压为电动气缸2的加压和致动器3的加压的合成特性。因此,由于直到在活塞实际到达切换位置并且输出室24与储存器45连通为止,通过加压处理s101,轮缸81~84侧的液量相对于主截止阀62增加,所以压力传感器73的检测值不会成为阈值以下,仅在输出室24与储存器45连通时检测值才成为阈值以下。通过两者的连通,输出室24的液压以及轮压从与提高程度相应的较高的状态一下子降低到0。由此,能够高精度地推断活塞的切换位置。
85.刚度变更部92优选在加压处理s101中,将差压控制阀312、322的目标差压(相对于大气压的差压)设定为高于阈值的值。由此,可抑制在活塞23到达切换位置之前输出室24的液压小于阈值。此外,在具体例1中,也可以在第一移动处理s102时,存储压力传感器73的检测值(输出室24的液压)从0开始上升,并达到阈值(阈值以上)的定时的位置信息。但是,在具体例1中,在第二移动处理s104中输出室24与储存器45连通时的流体的流速高于第一移动处理s102时的流体的流速(液压的变化梯度较大)。因此,在刚度变更处理为加压处理s101的情况下,通过在第二移动处理s104时检测切换位置,能够高精度地推断切换位置。
86.(刚度变更处理的具体例2)
87.作为刚度变更处理的具体例2,如图6所示,刚度变更部92使保持阀313、323闭阀
(s201:闭阀处理)。保持阀313、323如上述那样设置于输出液路201、202,且构成为通过闭阀可保持轮缸81~84的液压。通过将所有的保持阀313、323闭阀,从电动气缸2流出的流体在达到轮缸81~84之前被保持阀313、323切断。此外,也可以代替保持阀313而通过连通控制阀61切断从电动气缸2流出的流体。
88.由于通过闭阀处理s201,输出室24与轮缸81~84被切断,所以输出液路201、202的容积变小。由此,在输出室24中,减小单位容积时的液压的增大梯度增大。换句话说,输出室24的刚度提高。另外,通过切断输出液路201、202,输出室24的刚度不再受轮缸81~84的刚度影响。这样,通过闭阀处理s201,输出室24的刚度升高。
89.推断部91在闭阀处理s201后,使活塞23从初始位置向轴向一方移动(s202:移动处理)。而且,如图7所示,推断部91检测压力传感器73的检测值成为阈值(阈值以上)的时刻,并存储此时的旋转角传感器74的检测值(s203:检测处理)。
90.(具体例2的效果)
91.根据具体例2,由于通过闭阀处理s201,输出室24的刚度升高,所以在通过移动处理s202活塞23超过切换位置时,压力传感器73的检测值的增大梯度增大。因此,在活塞23到达切换位置后,在较早的定时,压力传感器73的检测值成为阈值以上。换句话说,能够高精度地检测切换位置。
92.另外,在刚度变更处理是闭阀处理s201的情况下,从切换位置的检测精度的观点来看,能够推测为在加压时的检测和减压时的检测中几乎没有区别。因此,在具体例2的情况下,从缩短位置推断处理的时间的观点来看,推断部91优选在加压时(移动处理s202时)检测切换位置。
93.(位置推断处理后的控制)
94.在通过位置推断处理检测/存储切换位置后,第一制动ecu901在规定的定时(例如,车辆行驶开始时)使活塞23从初始位置移动到切换位置。由此,无效行程较小或者为0,提高针对制动力产生的响应性。另外,第一制动ecu901为了在规定的定时,在实际未产生制动力的范围内在输出室24中产生液压,也可以使活塞23超过切换位置向轴向一方移动。由此,能够更加可靠地使无效行程为0。通过如本实施方式这样高精度地获取切换位置的信息,能够抑制由无效行程引起的响应性的减少、由产生不必要的制动力引起的牵引产生。根据本实施方式,提高例如碰撞减损制动(aeb)的响应性。另外,当在加压时检测切换位置的情况下,优选在到达切换位置的时刻停止活塞23的移动,并使其停止在该位置。由此,例如,不需要使活塞23再次移动到切换位置的处理。
95.(变形例)
96.本发明并不限于上述实施方式。例如,作为主缸单元4的变形例,如图8所示,主缸单元40也可以是具有两个主室410a、410b的串联型的气缸单元。主缸单元40具备主缸410、第一主活塞401、第二主活塞402以及施力部件403、404。
97.在主缸410中形成有第一主室410a和第二主室410b,其中,第一主室410a由第一主活塞401以及第二主活塞402划分而成,第二主室410b由第二主活塞402划分而成。施力部件403配置于第一主室410a,对第一主活塞401朝向初始位置施力。施力部件404配置于第二主室410b,对第二主活塞402朝向初始位置施力。
98.主缸单元40构成为使第一主室410a和第二主室410b成为同压。储存器45与主室
410a、410b的连通通过主活塞401、402从初始位置前进规定量而被切断。第一主室410a经由液路52a与第二液路52连接。在液路52a配置有主截止阀62a。另外,在第二液路52中的液路52a与第二液路52的连接点和输出室24之间的部分配置有连通控制阀61a。各电磁阀61a、62a的结构以及功能与电磁阀61、62相同。
99.根据该结构,通过将主截止阀62、62a开阀,能够从主缸单元40向所有的轮缸81~84提供液压(主压)。在该结构的情况下,加压处理s101也可以通过主缸单元40的工作来执行。
100.例如,在通过液压制动力以外的制动力的停车状态下,刚度变更部92在执行位置推断处理之前,例如通过声音、显示画面对驾驶员(或者检查作业者)指示制动操作部件z的操作。此时的电磁阀的状态是非通电状态,主截止阀62、62a为开阀,连通控制阀61、61a闭阀,模拟器截止阀44闭阀。
101.若驾驶员踩下制动操作部件z,则主活塞401、402移动,流体被从各主室410a、410b供给到轮缸81~84。例如,若驾驶员将制动操作部件z操作规定的行程,则刚度变更部92对驾驶员提示操作停止的指示。而且,刚度变更部92例如将差压控制阀312、322闭阀。由此,加压处理s101完成。之后,推断部91以及刚度变更部92执行与图4的流程相同的控制。这样,刚度变更处理也可以由主缸单元40执行。在该情况下,主缸单元40相当于第二加压部。
102.(位置推断处理的执行定时的另一个例子)
103.在发生卡钳击退的可能性较高的情况下,推断部91以及刚度变更部92也可以执行位置推断处理以及加压处理s101。卡钳击退是在车辆转弯时,制动块被按压于转子,卡钳内的活塞后退的现象。若发生卡钳击退,则活塞的无效行程(未产生制动力的行程)增大。
104.制动ecu901、902例如能够基于横摆率传感器、转向操纵角传感器等的检测值检测(判定)车辆的转弯状态和直行状态。刚度变更部92若检测出车辆转弯后的直行状态,则执行用于位置推断处理的加压处理s101。而且,例如如图4所示,推断部91执行位置推断处理。
105.根据该结构,卡钳内的活塞通过加压处理s101被向制动块侧按压,无效行程变小。换句话说,根据该结构,能够将位置推断处理以及刚度变更处理利用于卡钳击退的消除。
106.另外,推断部91也可以根据流体的温度变化来执行位置推断处理。压力传感器73具备温度传感器,能够检测流体的温度。例如,在为了使电动气缸2的无效行程为0而第一制动ecu901使活塞23比切换位置向轴向一方移动的情况下,电动气缸2与轮缸81~84之间的液路成为封闭状态。例如,当在封闭状态下流体的温度升高的情况下,由于流体体积增大而产生压力,可能对装置施加负荷(负荷转矩上升)。在这样的定时,通过执行位置推断处理,由于输出室24与储存器45连通,能够将由温度变化引起的负荷状态复位。
107.像这样,位置推断处理以及刚度变更处理例如在没有液压制动力而停车的规定停车状态时、车辆行驶时、车辆转弯后的直行时、或者温度变化为规定值以上时执行。此外,在加压处理s101中可以产生制动力,但位置推断处理以及刚度变更处理由于可以在短时间(例如,数百毫秒)内执行,所以即使在行驶中进行也几乎不影响驾驶员的驾驶感觉。
108.(其他)
109.本发明例如也能够应用于包含再生制动装置的车辆(混合动力车辆、电动汽车)、执行自动制动控制的车辆、或者自动驾驶车辆。另外,车辆用制动装置也可以由一个制动ecu控制。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。