技术特征:
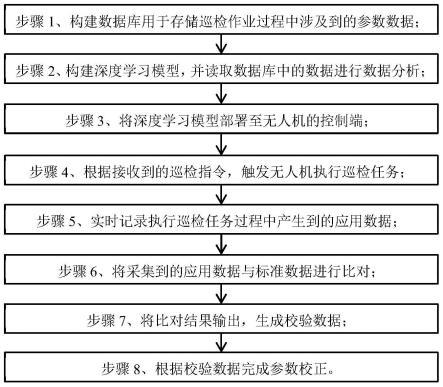
1.一种基于前端目标识别和无人机避障信息的pms参数自动校验方法,其特征在于,具体包括以下步骤:步骤1、构建数据库用于存储巡检作业过程中涉及到的参数数据;步骤2、构建深度学习模型,并读取数据库中的数据进行数据分析;步骤3、将深度学习模型部署至无人机的控制端;步骤4、根据接收到的巡检指令,触发无人机执行巡检任务;步骤5、实时记录执行巡检任务过程中产生到的应用数据;步骤6、将采集到的应用数据与标准数据进行比对;步骤7、将比对结果输出,生成校验数据;步骤8、根据校验数据完成参数校正。2.根据权利要求1所述的一种基于前端目标识别和无人机避障信息的pms参数自动校验方法,其特征在于,为了提高所述深度学习模型的使用性能,读取所述数据库中的数据构建数据训练集;所述数据训练集还包括无人机巡检过程中实时采集到的巡检视频和图像。3.根据权利要求2所述的一种基于前端目标识别和无人机避障信息的pms参数自动校验方法,其特征在于,采用所述数据训练集对所述深度学习模型进行训练的过程中,在读取到数据训练集后,针对需要进行测量分析的目标,进行目标点标注和关键点标注;基于目标点标注和关键点标注的结果,进行目标检测和关键点检测的性能训练。4.根据权利要求1所述的一种基于前端目标识别和无人机避障信息的pms参数自动校验方法,其特征在于,无人机执行巡检任务的过程中,通过避障传感器的报警提示信息,实现拍摄距离的安全控制。5.根据权利要求1所述的一种基于前端目标识别和无人机避障信息的pms参数自动校验方法,其特征在于,无人机执行巡检任务的过程中,通过划分对称巡检目标的位置信息,实现单侧路径规划,并通过对称翻转的方式,完成另一侧的路径规划。6.根据权利要求1所述的一种基于前端目标识别和无人机避障信息的pms参数自动校验方法,其特征在于,无人机执行巡检任务的过程中,获取当前巡检杆塔高度的过程为:当杆塔塔顶画面置于无人机检测画面的中央时,将无人机悬停,并记录此时无人机的悬停位置,随后,无人机缓慢往塔顶下降,直到避障传感器发出报警信息时,停止下降,并记录此时无人机的高度h
t
以及避障传感器的报警距离d
t
,同时根据获得的参数信息获得当前杆塔的高度h
t
:h
t
=h
t-d
t
式中,h
t
表示无人机的高度;d
t
表示避障传感器的距离信息。7.根据权利要求1所述的一种基于前端目标识别和无人机避障信息的pms参数自动校验方法,其特征在于,无人机执行巡检任务的过程中,获取当前巡检杆塔横担参数信息的过程为:无人机实时获取横担端点的图像信息,并根据横担端点的检测框与画面中心的偏移量调整无人机航姿,使横担端点处于画面中心;记录此时无人机的高度,因此,横担之间的间距为当前横担与下一层横担高度之差d
l
:d
l
=h
l-h
l 1
式中,h
l
表示当前横担的高度;h
l 1
表示下一层横担的高度;随后,将无人机保持当前的状态,并缓慢向横担端点靠近,直到避障传感器第一次报警,记录此时横担端点的检测框尺寸(w,h)、避障传感器的报警距离d1、无人机此时的gps(l1,b1),从而获得当前层横担的左长为|b
1-d
1-b|,横担左宽为d1*w*s,其中s表示当前五人及相机镜头的距离与像素之间的转换系数。8.一种基于前端目标识别和无人机避障信息的pms参数自动校验系统,用于实现如权利要求1-7任意一项所述的参数自动检验方法,其特征在于,具体包括以下模块:数据库,用于存储巡检过程中涉及到的参数数据;深度学习模型,用于读取数据库中存储的数据并进行数据分析;部署模块,用于根据需求将深度学习模型部署至手机应用终端;进程触发模块,用于生成进程触发机制,触发进程的执行;数据采集模块,用于在巡检过程中实时采集产生的作业数据;数据比对模块,用于比对数据采集模块采集到的数据与标准数据之间的差异;数据输出模块,用于输出数据比对模块获得的差异比对结果;校验数据生成模块,用于根据数据输出模块输出的差异比对结果生成校验数据;参数校正模块,用于根据生成的校验数据完成参数校正。9.一种基于前端目标识别和无人机避障信息的pms参数自动校验设备,其特征在于,所述设备包括:处理器以及存储有计算机程序指令的存储器;所述处理器读取并执行所述计算机程序指令,以实现如权利要求1-7任意一项所述的参数自动检验方法。10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机程序指令,所述计算机程序指令被处理器执行时实现如权利要求1-7任意一项所述的参数自动检验方法。
技术总结
本发明提出一种基于前端目标识别和无人机避障信息的PMS参数自动校验方法,属于参数校验的技术领域,其中方法包括:步骤1、构建数据库用于存储巡检作业过程中涉及到的参数数据;步骤2、构建深度学习模型,并读取数据库中的数据进行数据分析;步骤3、将深度学习模型部署至无人机的控制端;步骤4、根据接收到的巡检指令,触发无人机执行巡检任务;步骤5、实时记录执行巡检任务过程中产生到的应用数据;步骤6、将采集到的应用数据与标准数据进行比对;步骤7、将比对结果输出,生成校验数据;步骤8、根据校验数据完成参数校正。本发明通过对杆塔和塔上设备的关键参数进行自动采集和校验,有效减少了冗余的人工的操作,提高数据准确率。提高数据准确率。提高数据准确率。
技术研发人员:海雷 冷聪
受保护的技术使用者:中科方寸知微(南京)科技有限公司
技术研发日:2022.08.31
技术公布日:2022/11/11
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。