1.本实用新型涉及变位机技术领域,特别是涉及一种两轴联动机器人变位机。
背景技术:
2.变位机是专用焊接辅助设备,适用于回转工作的焊接变位,以得到理想的加工位置和焊接速度。可与操作机、焊机配套使用,组成自动焊接中心,也可用于手工作业时的工件变位。工作台回转采用变频器无级调速,调速精度高。遥控盒可实现对工作台的远程操作。现有的机器人变位机由于机械本身缺乏多轴联动设备,故在使用变位机进行焊接辅助作业时,需要借助外部设备参与机器人变位机的联动作业,从而使得变位机在某些加工状态下受限的问题。
3.目前现有大多机器人焊接变位机在对不同规格的工件夹持时,需要大量时间调整工件位置,降低了工作效率,并且通常不具备对工件进行翻面的功能,实用性较低。
技术实现要素:
4.本实用新型的目的是针对背景技术中存在的技术问题,本实用新型提出一种两轴联动机器人变位机。
5.本实用新型的技术方案:一种两轴联动机器人变位机,包括基座及设置在基座上方固定台;基座内部为空心结构,基座的上端设置有升降台,基座的内侧设置有用于驱动升降台移动的直线驱动机构;升降台的顶端转动连接有旋转台,升降台上安装有用于驱动旋转台转动的伺服电机f;旋转台上固定设置有两个安装侧板,固定台的两端均连接有转轴,两个转轴分别与两侧的安装侧板转动连接,一侧的安装侧板上安装有用于驱动转轴转动的动力组件a;固定台上开设有十字滑孔,十字滑孔内侧的前后端均滑动安装有u形滑框a,固定台底端安装有用于驱动两个u形滑框a相互靠近或远离的动力组件b,两个u形滑框a上均竖直滑动连接有夹板a;两个夹板a的顶端均安装旋转机构,旋转机构包括伺服电机a和防滑板,伺服电机a固定安装在夹板a上,防滑板与伺服电机a的输出轴连接;十字滑孔内侧的左右端均滑动安装有u形滑框b,固定台底端安装有用于驱动两个u形滑框b相互靠近或远离的动力组件c,两个u形滑框b上均竖直滑动连接有夹板b;固定台的底端安装有用于驱动两个夹板a和两个夹板b同步移动的动力组件d。
6.优选的,动力组件a包括伺服电机e、齿轮、链条和齿环,伺服电机e固定设置在安装侧板上,齿轮与伺服电机e的输出轴连接,齿环固定设置在转轴上,齿环与齿轮之间通过链条传动连接。
7.优选的,两个u形滑框a上均固定设置有连接块a,动力组件b包括伺服电机c和双向丝杆a,伺服电机c安装在固定台的底端,双向丝杆a与伺服电机c的输出轴连接,两个连接块a均与双向丝杆a螺纹连接。
8.优选的,两个u形滑框b上均固定设置有连接块b,动力组件c包括伺服电机d和双向丝杆b,伺服电机d安装在固定台的底端,双向丝杆b与伺服电机d的输出轴连接,两个连接块
b均与双向丝杆b螺纹连接。
9.优选的,固定台的下方设置有连接滑板,两个夹板a和两个夹板b均滑动安装在连接滑板上,动力组件d包括伺服电机b和丝杆,伺服电机b安装在固定台的底端,丝杆与伺服电机b的输出轴连接,连接滑板与丝杆螺纹连接。
10.与现有技术相比,本实用新型的上述技术方案具有如下有益的技术效果:本实用新型对工件的夹持效果好,操作效率高,可对工件进行翻面工作,还可对夹持的工件进行多角度转动,从而满足了装置两轴联动的加工需求,解决了现有的机器人变位机由于装置本身缺乏多轴联动设备导致装置使用功能受限的问题。
附图说明
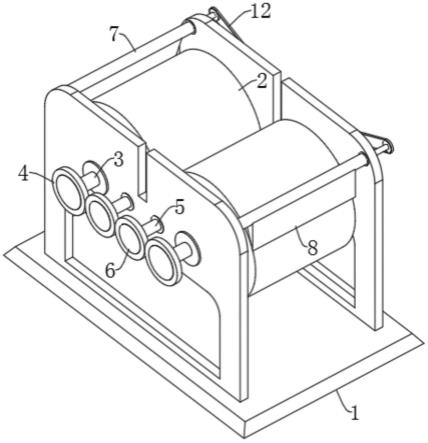
11.图1-2均为本实用新型的结构示意图。
12.图3为本实用新型的爆炸图。
13.附图标记:1、固定台;101、十字滑孔;201、u形滑框a;202、u形滑框b;301、夹板a;302、夹板b;4、基座;5、升降台;6、旋转台;7、连接滑板;8、伺服电机a;9、防滑板;10、伺服电机b;11、丝杆;121、伺服电机c;122、双向丝杆a;131、伺服电机d;132、双向丝杆b;14、转轴;151、伺服电机e;152、齿轮;153、链条;154、齿环;16、伺服电机f;17、直线驱动机构;18、安装侧板;191、连接块a;192、连接块b。
具体实施方式
14.如图1-3所示,本实用新型提出的一种两轴联动机器人变位机,包括基座4及设置在基座4上方固定台1;基座4内部为空心结构,基座4的上端设置有升降台5,基座4的内侧设置有用于驱动升降台5移动的直线驱动机构17;升降台5的顶端转动连接有旋转台6,升降台5上安装有用于驱动旋转台6转动的伺服电机f16;旋转台6上固定设置有两个安装侧板18,固定台1的两端均连接有转轴14,两个转轴14分别与两侧的安装侧板18转动连接,一侧的安装侧板18上安装有用于驱动转轴14转动的动力组件a,动力组件a包括伺服电机e151、齿轮152、链条153和齿环154,伺服电机e151固定设置在安装侧板18上,齿轮152与伺服电机e151的输出轴连接,齿环154固定设置在转轴14上,齿环154与齿轮152之间通过链条153传动连接;固定台1上开设有十字滑孔101,十字滑孔101内侧的前后端均滑动安装有u形滑框a201,固定台底端安装有用于驱动两个u形滑框a201相互靠近或远离的动力组件b,两个u形滑框a201上均固定设置有连接块a191,动力组件b包括伺服电机c121和双向丝杆a122,伺服电机c121安装在固定台1的底端,双向丝杆a122与伺服电机c121的输出轴连接,两个连接块a191均与双向丝杆a122螺纹连接,两个u形滑框a201上均竖直滑动连接有夹板a301;两个夹板a301的顶端均安装旋转机构,旋转机构包括伺服电机a8和防滑板9,伺服电机a8固定安装在夹板a301上,防滑板9与伺服电机a8的输出轴连接;十字滑孔101内侧的左右端均滑动安装有u形滑框b202,固定台1底端安装有用于驱动两个u形滑框b202相互靠近或远离的动力组件c,两个u形滑框b202上均固定设置有连接块b192,动力组件c包括伺服电机d131和双向丝杆b132,伺服电机d131安装在固定台1的底端,双向丝杆b132与伺服电机d131的输出轴连接,两个连接块b192均与双向丝杆b132螺纹连接,两个u形滑框b202上均竖直滑动连接有夹板b302;固定台1的底端安装有用于驱动两个夹板a301和两个夹板b302同步移动的动力组
件d,固定台1的下方设置有连接滑板7,两个夹板a301和两个夹板b302均滑动安装在连接滑板7上,动力组件d包括伺服电机b10和丝杆11,伺服电机b10安装在固定台1的底端,丝杆11与伺服电机b10的输出轴连接,连接滑板7与丝杆11螺纹连接。
15.本实用新型的工作原理及使用方法如下:通过设置的动力组件b可驱动两个夹板a301相互靠近,设置的动力组件c可驱动两个夹板b302相互靠近,进而可对工件的四周进行夹紧,在对工件进行夹紧组件之前,通过设置的动力组件d可驱动连接滑板7上下移动,进而能够带动两个夹板a301和两个夹板b302竖直移动,从而可调整对工件的夹持范围,适应性强,通过设置的动力组件b驱动两个夹板a301相靠近,使得两个防滑板9分别与工件的两侧抵紧,随后驱动连接滑板7上移,再同时启动两个伺服电机a8工作,伺服电机a8驱动防滑板9转动,进而可驱动工件进行翻面工作,实用性强;启动动力组件a工作,动力组件a驱动转轴14转动,转轴14转动可带动固定台1上下翻转;启动伺服电机f16工作,伺服电机f16驱动旋转台6转动,旋转台6可带动固定台1进行水平方向上的转动;启动直线驱动机构17工作,直线驱动机构17可驱动固定台1上下移动,进而可调整工件的高度;综上所述本实用新型可对工件进行翻面工作,还可对夹持的工件进行多角度转动,从而满足了装置两轴联动的加工需求,解决了现有的机器人变位机由于装置本身缺乏多轴联动设备导致装置使用功能受限的问题。
16.上面结合附图对本实用新型的实施方式作了详细说明,但是本实用新型并不限于此,在所属技术领域的技术人员所具备的知识范围内,在不脱离本实用新型宗旨的前提下还可以作出各种变化。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。