1.本发明涉及电力钢管杆焊接技术领域,尤其涉及一种基于纵缝自动跟踪的电力钢管杆焊接装置。
背景技术:
2.随着经济的高速发展,电力基础建设投入越来越大,电力钢管杆使用越来越多。市场需求量非常大,钢管杆设计采用锥形纵缝管焊接成型或多边形折弯成型,但现有技术中钢管杆坡口大小不同、高低不平、弯曲等导致焊缝不均匀、质量不好等问题,虽然现有技术中还采用跟踪轮等跟踪装置来调节焊头位置来保证焊缝质量,但这种跟踪轮不能精确有效调节焊头位置,从而导致焊缝不均匀、质量不好等缺点。
技术实现要素:
3.本发明为了解决现有技术中存在的上述缺陷和不足,提供了一种基于纵缝自动跟踪的电力钢管杆焊接装置。
4.为解决上述技术问题,本发明提供一种基于纵缝自动跟踪的电力钢管杆焊接装置,其包括磁吸焊接小车、纵缝跟踪装置、防脱装置和控制装置,磁吸焊接小车设在钢管杆上,控制装置设在磁吸焊接小车上,防脱装置设在钢管杆上;纵缝跟踪装置置于钢管杆上方、且与磁吸焊接小车前进端侧壁的上端部相连;
5.磁吸焊接小车包括小车体、行走机构、升降机构、旋转机构和焊枪,行走机构为2组,分别设置在所述小车体的两侧,升降机构设置在小车体前进端的侧壁上,旋转机构设置在升降机构上,焊枪设置在旋转机构上,且焊枪设置于钢管杆的上方;
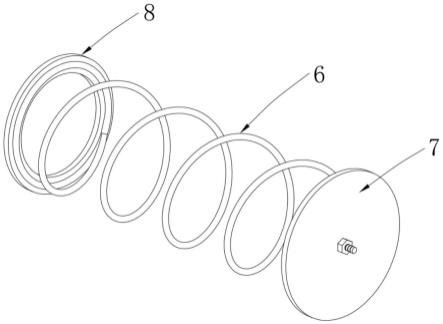
6.纵缝跟踪装置包括安装座、中间跟踪件、两个侧边跟踪件和跟踪架;安装座一端设置在小车体上,另一端设有通孔;中间跟踪件包括两端带螺纹的中间杆、尖针、螺母一和螺母二,中间杆依次穿过通孔和跟踪架,并分别通过螺母二和螺母一锁紧;中间杆下端部设有尖针,尖针上设有目标环一;跟踪架上位于中间杆两侧位置处设有长条形通槽;侧边跟踪件包括随动杆、随动件和弹簧一,随动杆分为一体相连的两段,且两段夹角为钝角,随动杆的上端穿过长条形通槽通过螺纹连接螺母三,下端指向尖针;弹簧一套设在随动杆上,弹簧一的一端抵在螺母三下端面,弹簧一的另一端抵在跟踪架的上端面上;随动件与随动杆的下端部铰接;随动件相对于跟踪架旋转,使随动件贴着纵缝的坡口移动;随动件上设有目标环二;激光传感器用于检测目标环一和目标环二的位置信息;
7.控制装置包括单片机、信号采集器、激光传感器、高度传感器一和高度传感器二,信号采集器用于接收所述激光传感器、高度传感器一和高度传感器二发送的信号信息,并传送至单片机。
8.进一步,行走机构包括支架、调节杆、弹簧二、螺母四、轮架和滚轮;支架设置在小车体的侧壁上,调节杆穿过支架上的通孔,两个弹簧二套设在调节杆上,并且分别位于支架的上方和下方,两个弹簧二远离支架的端部通过螺母四锁紧;调节杆为l形,轮架设在调节
杆的下端部,滚轮设置在轮架的两端,每组行走机构的一个滚轮与一个滚轮驱动电机相连,滚轮驱动电机与单片机电连。
9.进一步,升降机构包括升降驱动机构、传动件和滑板,升降驱动机构设置在安装座上,传动件置于安装座下方、并穿过安装座与升降驱动机构连接,滑板设在传动件上,滑板靠近小车体的侧壁上设有滑块,激光传感器设置在滑板前进端的侧壁上,小车体前进端侧壁上对应滑块的位置处设有与滑块相配的滑槽;升降驱动机构驱动传动件带动滑板升降。
10.进一步,升降驱动机构为升降电机,传动件包括丝杆、螺母五,升降电机与单片机电连,带动丝杆转动,滑板上设有与丝杆相配的内螺纹通孔、并通过内螺纹与丝杆相连,螺母五与丝杆的下端部螺纹连接。
11.进一步,旋转机构包括旋转驱动机构、转轴、转动架,旋转驱动机构为旋转电机,转轴与旋转电机连接,转动架一端套设在转轴上,焊枪设置在转动架的另一端;旋转电机与单片机电连,通过驱动转轴转动,进一步带动转动架随着转轴一起转动。
12.进一步,转动架的两侧与焊枪对应位置处均设有高度传感器一,高度传感器一用于检测焊枪与纵缝之间的高度,在跟踪架的前后端设有高度传感器二,高度传感器二用于检测跟踪架与纵缝之间的高度,高度传感器一、高度传感器二分别与单片机连接。
13.进一步,防脱装置包括多个防脱支架和一根钢丝绳,防脱支架的底端设有弧形支座,弧形支座具有磁性,用于吸附在钢管杆表面,防脱支架的顶端设有通孔,钢丝绳穿过通孔。
14.进一步,支架靠近防脱装置的一侧设有销孔,插销一端插入销孔,插销另一端设置一l形板,插销上套设一弹簧三;弹簧三一端设置连接在支架上,另一端设置连接在l形板上;l形板与防脱支架、钢丝绳滑动配合。
15.进一步,l形板上还设置有压力传感器、警报器,压力传感器、警报器分别与单片机电连。
16.进一步,随动件为l形结构,随动件上设有三个目标环二,三个目标环二分别设在随动件l形侧壁上的中间位置和两端部上。
17.本发明所达到的有益技术效果:
18.1.本发明通过设置纵缝跟踪装置,能够根据纵缝坡口的实际情况移动,纵缝跟踪装置的两个随动件分别沿着纵缝坡口的两侧自由移动,在坡口侧边出现弯曲的情况下,激光传感器检测到的目标环信号也发生变化,通过分析纵缝的弯曲情况,单片机再通过旋转电机调整焊枪的角度;纵缝跟踪装置的随动杆在高度方向上相对于跟踪架升降移动,能够根据纵缝坡口表面自动调节高度,从而保证随动件不会卡住。
19.2.通过设置行走机构,能够沿着不同直径大小的钢管杆移动,行走机构中的调节杆和弹簧二的结合能保证在钢管杆不平整的表面自动调节高度和减震缓冲作用,也有利于保证磁吸焊接小车的平衡性。
20.3.通过设置升降机构、旋转机构、高度传感器一和高度传感器二等,根据前面的纵缝坡口弯曲度、表面不平整变化,能够及时焊枪调节高度和转动角度,从而保证焊缝的焊接质量。
21.4.通过防脱装置,能够根据钢管杆长度选择防脱支架的数量和选择钢丝绳的长度,相对于轨道、齿条之类的设置,其更简单、灵活、方便。
附图说明
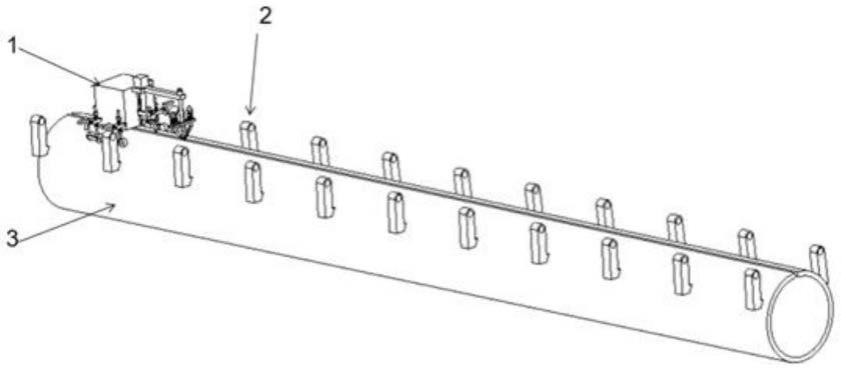
22.图1为本发明提出的一种基于纵缝自动跟踪的电力钢管杆焊接装置的工作状态下的结构示意图;
23.图2为本发明提出的一种基于纵缝自动跟踪的电力钢管杆焊接装置的磁吸焊接小车的结构示意图;
24.图3为本发明提出的一种基于纵缝自动跟踪的电力钢管杆焊接装置的磁吸焊接小车的示意图;
25.图4为本发明提出的一种基于纵缝自动跟踪的电力钢管杆焊接装置的纵缝跟踪装置的细节结构示意图;
26.图5为本发明提出的一种基于纵缝自动跟踪的电力钢管杆焊接装置的防脱装置的结构示意图;
27.图6为本发明提出的一种基于纵缝自动跟踪的电力钢管杆焊接装置的控制装置的组成框图。
具体实施方式
28.下面结合具体实施方式对本专利的技术方案作进一步详细地说明。
29.下面详细描述本专利的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本专利,而不能理解为对本专利的限制。
30.在本专利的描述中,需要理解的是,术语“中心”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本专利和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本专利的限制。
31.在本专利的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“设置”应做广义理解,例如,可以是固定相连、设置,也可以是可拆卸连接、设置,或一体地连接、设置。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本专利中的具体含义。
32.如图1-6所示,本发明的一种基于纵缝自动跟踪的电力钢管杆焊接装置,包括磁吸焊接小车1、纵缝跟踪装置4、防脱装置2和控制装置(图中未示出)。其中,磁吸焊接小车1置于钢管杆3上,磁吸焊接小车1上设有激光传感器16和控制装置;防脱装置2设在钢管杆3上;纵缝跟踪装置4置于钢管杆3上方、且与磁吸焊接小车1前进端侧壁的上端部相连。
33.磁吸焊接小车1包括小车体11、行走机构12、升降机构13、旋转机构14、焊枪17,行走机构12为2组,分设置在小车体11的两侧,升降机构13设置在小车体11前进端的侧壁上,旋转机构14设置在升降机构13上,焊枪17设置在旋转机构14上,且焊枪17置于钢管杆3的上方;
34.纵缝跟踪装置4包括安装座41、中间跟踪件、两个侧边跟踪件和跟踪架45,安装座41一端设置在小车体11上,另一端设有通孔,中间跟踪件包括两端带螺纹的中间杆43、尖针、螺母一49,中间杆43依次穿过通孔和跟踪架45,并通过螺母二42和螺母一49锁紧,中间杆43的下端部设有尖针,尖针上设有目标环一481;跟踪架45上位于中间杆43两侧位置处设
有长条形通槽;侧边跟踪件包括随动杆46、随动件48和弹簧一47,随动杆46分为一体相连的两段,且两段之间的夹角为钝角;随动杆46的上端穿过长条形通槽通过螺纹连接螺母三44,下端指向尖针;弹簧一47套设在随动杆46上,弹簧一47的一端抵在螺母三44下端面,弹簧一47另一端抵在跟踪架45上端面,随动件48铰接在随动杆46的下端;随动件48能相对于跟踪架45转动,使随动件48贴着纵缝的坡口移动,保证随动件48不会卡住。随动件48上设有目标环二482;激光传感器16用于检测目标环一481和目标环二482。纵缝跟踪装置4的两个随动件48分别沿着纵缝坡口的两侧自由移动,在坡口侧边出现弯曲的情况下,激光传感器16检测到目标环一481、目标环二482的位置信息也发生变化,通过分析可知纵缝的弯曲情况,单片机再调整焊枪17的角度;纵缝跟踪装置4的随动杆46在高度方向上相对于跟踪架45可升降移动,能够根据纵缝坡口表面自动调节高度,从而保证随动件48不会卡住。
35.控制装置包括单片机、信号采集器、激光传感器16、高度传感器一144和高度传感器二,信号采集器用于接收所述激光传感器16、高度传感器一144和高度传感器二发送的信号信息,并传送至单片机。
36.行走机构12包括支架121、调节杆122、弹簧二126、螺母四125、轮架124、滚轮123,支架121设置在小车体11的侧面上,调节杆122穿过支架121,两个弹簧二126套设在调节杆122上,并且分别位于支架121的上方和下方,两个弹簧二126远离支架121的端部通过螺母四125锁紧;调节杆122为l形结构,轮架124设置在调节杆122的下端部,轮架124的两端转动连接有滚轮123,作为具体实施例,滚轮123可以是磁铁滚轮或在车体底端设置磁铁。行走机构12其中一个滚轮123上设有滚轮驱动电机127。滚轮驱动电机127与单片机电连,由单片机控制其工作或停止工作;行走机构12能够使磁吸焊接小车1沿着不同直径大小的钢管杆3移动,行走机构12中的调节杆122和弹簧的结合能保证在钢管杆3不平整的表面自动调节高度和减震缓冲作用,也有利于保证磁吸焊接小车1的平衡性。
37.升降机构13包括升降驱动机构131、传动件132和滑板134,升降驱动机构131设置在安装座41上,传动件132置于安装座41下方、并穿过安装座41与升降驱动机构131连接,滑板134设在传动件132上,滑板134一端设有滑块135,滑板134的另一端设有激光传感器16,小车体11前进端侧壁上对应滑块135的位置处设有与滑块135相配的滑槽;升降驱动机构131驱动传动件132带动滑板134升降。通过升降机构13带动旋转机构14升降,从而带动焊枪17上下移动,能调整焊枪17的高度位置以满足不同高度要求。
38.升降驱动机构131为升降电机,传动件132包括丝杆、螺母五133,升降电机与单片机电连,带动丝杆转动,滑板134上设有与丝杆相配的内螺纹通孔、并通过内螺纹与丝杆相连,螺母五133螺纹连接在丝杆的下端部。
39.旋转机构14包括旋转驱动机构141、转轴142、转动架143,旋转驱动机构141为旋转电机,旋转电机与单片机电连,转轴142与旋转驱动机构141连接,转动架143一端套设在转轴142上,焊枪17设置在转动架143的另一端;单片机通过控制旋转驱动机构141工作驱动转轴142转动,进一步带动转动架143随着转轴142一起转动。旋转机构14带动焊枪17转动,从而保证焊枪17能根据纵缝的弯曲来焊接,这样设置的目的是适应直线和曲线的焊缝要求。
40.在转动架143的两侧与焊枪17对应位置处均设有高度传感器一144,高度传感器一144用于检测焊枪17与纵缝之间的高度,在跟踪架45的前后端设有高度传感器二(图中未示出),高度传感器二用于检测跟踪架45与纵缝之间的高度;高度传感器一144、高度传感器二
分别与单片机连接。高度传感器一144实时检测焊枪17与纵缝之间的高度,并且将检测到的高度信号发送给单片机。高度传感器二实时检测跟踪架45与纵缝的高度,单片机接收到高度传感器一144和高度传感器二检测到的高度信号后,经过分析处理,来调整焊枪17的高度,从而保证准确有效调节焊枪17的高度,保证焊缝质量要求。
41.为了防止磁吸焊接小车1从钢管杆3表面脱落,在磁吸焊接小车1的两侧设有防脱装置2,防脱装置2包括多个防脱支架21和一根钢丝绳(图中未示出),防脱支架21的底端设有弧形支座211,弧形支座211具有磁性,其能吸附在钢管杆3表面,防脱支架21的顶端设有通孔,钢丝绳穿过多个防脱支架21的通孔,钢丝绳拉紧后并且将钢丝绳的两端固定住。根据钢管杆3长度选择防脱支架21的数量和选择钢丝绳的长度,相对于轨道、齿条之类的设置,其更简单、灵活、方便。支架121靠近防脱装置2的一侧设有销孔,插销一端插入销孔,插销另一端设有l形板22,弹簧三23套设在插销上,弹簧三23一端设置连接在支架121上,弹簧三23另一端设置连接在l形板22上,l形板22能与防脱支架21、钢丝绳滑动配合。l形板22上还设置有压力传感器(图中未示出)、警报器(图中未示出),压力传感器、警报器分别与单片机电连。正常情况下,l形板22不与防脱支架21、钢丝绳接触,存在一定间隙。当磁吸焊接小车1偏移或者脱落时,l形板22与防脱支架21、钢丝绳接触时压力传感器将压力信号发给单片机,单片机接收到压力信号,分析判断检测到的压力是否超过压力设定值,若超过压力设定值,控制警报器发出警报并停止磁吸焊接小车1移动和焊枪17焊接,这样可以有效避免磁吸焊接小车1偏移和坠落。
42.随动件48为l形结构,随动件48上设有三个目标环二482,三个目标环二482分别设在随动件48的l形侧壁上的中间位置和两端部。激光传感器16实时检测目标环一481和三个目标环二482,目标环一481和目标环二482可设成多个同心圆环,单片机根据激光传感器16检测到信号来分析判断纵缝的弯曲度,再在焊枪17移动到弯曲位置时调整好焊枪17的角度。通过激光传感器16检测到的信号分析纵缝的弯曲度、通过高度传感器一144和高度传感器二检测到的高度信号来控制升降机构13升降和旋转机构14转动,以调整焊枪17的角度、高度。
43.以上已以较佳实施例公布了本发明,然其并非用以限制本发明,凡采取等同替换或等效变换的方案所获得的技术方案,均落在本发明的保护范围内。。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。