内窥镜疏通系统和方法
1.优先权要求
2.本技术要求于2020年2月27日提交的美国专利申请序列号16/803,612的优先权的权益,该申请的内容全部通过引入并入本文中。
技术领域
3.本文总体上涉及内窥镜系统,并且更具体地涉及如下疏通系统,该疏通系统用于在内窥镜手术期间疏通内窥镜,同时将解剖部位处的解剖环境的原位压力保持在控制之下。
背景技术:
4.内窥镜通常用于提供对患者内部位置的访问,从而为医生提供视觉访问通道。在微创外科手术中使用一些内窥镜,以从患者体内移除不想要的组织或异物。例如,内窥镜组织移除装置是如下器械:由临床医生用来远程地接近解剖部位处的坏死的、癌变的、受损的、受感染的或其他方式的不想要的软组织、骨或其他解剖结构,从相邻解剖结构切除所述不想要的物质,并将它们从解剖部位运走。临床医生使用肾镜检查肾脏系统,并在直接视觉控制下执行各种手术。例如,经皮肾镜取石术(pcnl)是涉及将肾镜通过患者的侧腹放置到肾盂中的手术。可以显现和提取来自身体的各个区域包括例如泌尿系统、胆囊、鼻通道、胃肠道、胃或扁桃体的结石或肿块。可以使用振荡力诸如冲击波、超声波能量(经由专用装置诸如超声波碎石机)或激光将较大尺寸的结石消融成较小的碎片。
5.一些内窥镜具有抽吸通道(也称为吸取通道)以输送切除的组织、结石(例如,各种结石形成区域中的结石或结石碎片)和肿块以及其他不想要的物质。冲洗剂流(例如,盐水溶液)可以在手术期间通过内窥镜中的冲洗通道被引入到解剖部位。冲洗流体可以促进通过抽吸通道移除组织碎片、结石碎片和其他不想要的物质。冲洗流体还可以帮助执行手术的临床医生保持对解剖环境的清晰可见度。另外,冲洗流对内窥镜组织移除装置具有冷却作用,并且可以帮助消散在结石(例如,肾结石)的消融期间产生的热量。
6.在内窥镜手术期间产生的不想要的物质可能会积聚并堵塞镜的工作通道(例如,抽吸通道或冲洗通道)。监测通道是否堵塞并及时有效地疏通阻塞的通道可以缩短手术时间,并提高内窥镜手术的效率、安全性和成功率。
技术实现要素:
7.本文描述了如下系统和方法,其用于在内窥镜手术期间原位疏通内窥镜的工作通道,同时在内窥镜手术期间将解剖部位处的压力保持在控制之下。根据本文的一方面,一种疏通系统包括:流量传感器,其被配置成感测通过内窥镜的工作通道的流率;以及控制模块,其被配置成使用感测到的流率来检测指示工作通道中存在或不存在堵塞的通道状态。响应于工作通道中存在堵塞,控制模块可以控制冲洗源或抽吸源中的一个或更多个,以分别向工作通道提供冲洗流体或抽吸压力,以疏通工作通道。控制模块可以在内窥镜手术期
间自动调节通过工作通道的冲洗流率或抽吸流率中的一个或更多个,以将解剖部位处的解剖环境的压力维持在基本上期望的压力水平(例如,预定的或用户指定的压力水平),或者实现与期望的压力对应的期望的流量状况。只要通道堵塞保持存在,就可以施加冲洗流体或抽吸压力。
8.示例1是一种用于在患者的手术期间疏通医疗装置的至少一个工作通道的系统。该系统包括:流量传感器,其被配置成感测通过医疗装置的至少一个工作通道的流率;以及控制模块,其被配置成:使用感测到的流率检测通道状态,该通道状态指示至少一个工作通道中存在或不存在堵塞;以及响应于检测到的通道状态指示至少一个工作通道中存在堵塞,控制冲洗源或抽吸源中的一个或更多个,以分别提供冲洗流体或抽吸压力,以疏通至少一个工作通道。
9.在示例2中,示例1的主题可选地包括控制模块,该控制模块可以被配置成:只要检测到的通道状态指示至少一个工作通道中存在堵塞,控制冲洗源或抽吸源中的一个或更多个以分别提供冲洗流体或抽吸压力以疏通至少一个工作通道。
10.在示例3中,示例1至2中任一项的主题可选地包括控制模块,该控制模块可以被配置成:响应于感测到的流率降低至低于第一阈值而检测到至少一个工作通道中存在堵塞;以及响应于感测到的流率增加至高于第二阈值而检测到至少一个工作通道中不存在堵塞。
11.在示例4中,示例1至3中的任一个或更多个的主题可选地包括控制模块,该控制模块可以被配置成:疏通至少一个工作通道,包括在向至少一个工作通道施加冲洗流体与施加抽吸压力之间交替。
12.在示例5中,示例1至4中的任一个或更多个的主题可选地包括控制模块,该控制模块可以被配置成:通过分别调节冲洗流体的流率或抽吸压力的流率来控制冲洗源或抽吸源中的一个或更多个以疏通至少一个工作通道。
13.在示例6中,示例3至5中的任一个或更多个的主题可选地包括:用户输入,其被配置成从用户接收要施加到患者的解剖部位处的解剖环境的期望的压力;以及压力传感器,其被配置成感测解剖部位处的解剖环境的压力;并且其中,控制模块被配置成调节通过至少一个工作通道的冲洗流率或抽吸流率中的一个或更多个,以将感测到的压力维持在基本上期望的压力的水平。
14.在示例7中,示例6的主题可选地包括:用户输入,其被配置成接收至少一个工作通道中的期望的流量状况,所述期望的流量状况对应于要施加到解剖环境的期望的压力;以及控制模块,其被配置成控制通过医疗装置的至少一个工作通道的冲洗流率或抽吸流率中的一个或更多个,以维持期望的流量状况。
15.在示例8中,示例6至7中的任一个或更多个的主题可选地包括:至少一个工作通道,其可以包括抽吸通道和冲洗通道;以及控制模块,其可以被配置成:将冲洗源流体地耦接至冲洗通道或抽吸通道中的一个,以便以可调节冲洗流率向其提供冲洗流体;以及将抽吸源流体地耦接至冲洗通道或抽吸通道中的另一个,以便以可调节抽吸流率向其提供抽吸压力。
16.在示例9中,示例8的主题可选地包括控制模块,该控制模块可以被配置成:响应于抽吸通道中存在堵塞,控制冲洗源以向抽吸通道提供冲洗体;响应于感测到的解剖部位处的解剖环境的压力的增加,控制抽吸源以以向冲洗通道施加抽吸压力,以将感测到的压力
维持在基本上期望的压力的水平;以及响应于抽吸通道中不存在堵塞,控制抽吸源以向抽吸通道施加抽吸压力,并控制冲洗源以向冲洗通道提供冲洗流体。
17.在示例10中,示例8的主题可选地包括控制模块,该控制模块可以被配置成:响应于冲洗通道中存在堵塞,控制抽吸源以向冲洗通道施加抽吸压力;响应于感测到的解剖部位处的解剖环境的压力的降低,控制冲洗源以向抽吸通道提供冲洗流体,以将感测到的压力维持在基本上期望的压力的水平;以及响应于冲洗通道中不存在堵塞,控制抽吸源以向抽吸通道施加抽吸压力,并控制冲洗源以向冲洗通道提供冲洗流体。
18.在示例11中,示例9的主题可选地包括期望的压力,该期望的压力可以是基本上净零压力,并且其中,控制模块可以被配置成:响应于感测到的压力的增加,控制抽吸源以基本上中和感测到的压力的增加的水平向冲洗通道施加抽吸压力。
19.在示例12中,示例10的主题可选地包括期望的压力,该期望的压力可以是基本上净零压力,并且其中,控制模块可以被配置成:响应于感测到的压力的降低,控制冲洗源以基本上中和感测到的压力的降低的冲洗流率向抽吸通道提供冲洗流体。
20.在示例13中,示例9的主题可选地包括期望的压力,该期望的压力可以是正压力,并且其中,控制模块可以被配置成:响应于感测到的压力的增加,控制抽吸源以一定水平向冲洗通道施加抽吸压力,以将感测到的压力维持在基本上期望的正压力的水平。
21.在示例14中,示例10的主题可选地包括期望的压力,该期望的压力可以是正压力,并且其中,控制模块可以被配置成:响应于感测到的压力的降低,控制冲洗源以冲洗流率向抽吸通道提供冲洗流体,使得将感测到的压力维持在基本上期望的正压力的水平。
22.在示例15中,示例9的主题可选地包括期望的压力,该期望的压力可以是负压力,并且其中,控制模块可以被配置成:响应于感测到的压力的增加,控制抽吸源以一定水平向冲洗通道施加抽吸压力,以将感测到的压力维持在基本上期望的负压力的水平。
23.在示例16中,示例10的主题可选地包括期望的压力,该期望的压力可以是负压力,并且其中,控制模块可以被配置成:响应于感测到的压力的降低,控制冲洗源以冲洗流率向抽吸通道提供冲洗流体,使得将感测到的压力维持在基本上期望的负压力的水平。
24.示例17是一种内窥镜外科手术系统,该内窥镜外科手术系统包括:内窥镜,其包括成像模块、外科手术模块和被配置成传导冲洗流体或抽吸压力的至少一个工作通道;用户输入,其被配置成从用户接收要施加到患者的解剖部位处的解剖环境的期望的压力;流量传感器,其被配置成感测通过内窥镜的至少一个工作通道的流率;压力传感器,其被配置成感测解剖部位处的解剖环境的压力;以及控制模块,其被配置成:使用感测到的流率检测通道状态,通道状态指示至少一个工作通道中存在或不存在堵塞;响应于检测到的通道状态指示至少一个工作通道中存在堵塞以及只要检测到的通道状态指示至少一个工作通道中存在堵塞,控制冲洗源或抽吸源中的一个或更多个,以分别提供冲洗流体或抽吸压力,以疏通至少一个工作通道;以及调节通过至少一个工作通道的冲洗流率或抽吸流率中的一个或更多个,以将感测到的压力维持在基本上期望的压力的水平。
25.示例18是一种在患者的手术期间疏通医疗装置的至少一个工作通道的方法。该方法包括以下步骤:经由流量传感器感测通过医疗装置的至少一个工作通道的流率;经由控制模块使用感测到的流率检测通道状态,通道状态指示至少一个工作通道中存在或不存在堵塞;以及响应于检测到的通道状态指示至少一个工作通道中存在堵塞,控制冲洗源或抽
吸源中的一个或更多个,以分别提供冲洗流体或抽吸压力,以疏通至少一个工作通道。
26.在示例19中,示例18的主题可选地包括:只要检测到的通道状态指示至少一个工作通道中存在堵塞,就可以继续提供冲洗流体或抽吸压力以疏通至少一个工作通道。
27.在示例20中,示例18至19中的任一个或更多个的主题可选地包括检测通道状态,其可以包括以下步骤:响应于感测到的流率降低至低于第一阈值而检测到至少一个工作通道中存在堵塞;以及响应于感测到的流率增加至高于第二阈值而检测到至少一个工作通道中不存在堵塞。
28.在示例21中,示例18至20中的任一个或更多个的主题可选地包括疏通至少一个工作通道,其可以包括在向至少一个工作通道施加冲洗流体与施加抽吸压力之间交替。
29.在示例22中,示例18至21中的任一个或更多个的主题可选地包括以下步骤:经由用户输入接收要施加到患者的解剖部位处的解剖环境的期望的压力;经由压力传感器感测解剖部位处的解剖环境的压力;以及调节通过至少一个工作通道的冲洗流率或抽吸流率中的一个或更多个,以将感测到的压力维持在基本上期望的压力的水平。
30.在示例23中,示例22的主题可选地包括以下步骤:接收至少一个工作通道中的期望的流量状况,所述期望的流量状况对应于要施加到解剖环境的期望的压力;以及调节通过至少一个工作通道的冲洗流率或抽吸流率中的一个或更多个,以维持期望的流量状况。
31.在示例24中,示例22的主题可选地包括至少一个工作通道,该至少一个工作通道可以包括抽吸通道和冲洗通道。该方法包括以下步骤:响应于抽吸通道中存在堵塞,控制冲洗源以向抽吸通道提供冲洗流体;响应于感测到的解剖部位处的解剖环境的压力的增加,控制抽吸源以向冲洗通道施加抽吸压力,以将感测到的压力维持在基本上期望的压力的水平;以及响应于抽吸通道中不存在堵塞,控制抽吸源以向抽吸通道施加抽吸压力,并控制冲洗源以向冲洗通道提供冲洗流体。
32.在示例25中,示例22的主题可选地包括至少一个工作通道,该至少一个工作通道可以包括抽吸通道和冲洗通道。该方法包括以下步骤:响应于冲洗通道中存在堵塞,控制抽吸源以向冲洗通道施加抽吸压力;响应于感测到的解剖部位处的解剖环境的压力的降低,控制冲洗源以向抽吸通道提供冲洗流体,以将感测到的压力维持在基本上期望的压力的水平;以及响应于冲洗通道中不存在堵塞,控制抽吸源以向抽吸通道施加抽吸压力,并控制冲洗源以向冲洗通道提供冲洗流体。
33.本概述是本技术的一些教导的概述,并且并不旨在对本主题进行排他或详尽的处理。关于本主题的进一步细节可在详细描述和所附权利要求中找到。在阅读和理解以下详细描述并查看形成其一部分的附图之后,本公开内容的其他方面对于本领域技术人员将是明显的,其中的每一个不应以限制性意义来理解。本公开内容的范围由所附权利要求及其合法等同物来限定。
附图说明
34.在附图中通过示例的方式示出了各种实施方式。这样的实施方式是说明性的并且不旨在是本主题的详尽的或排他的实施方式。
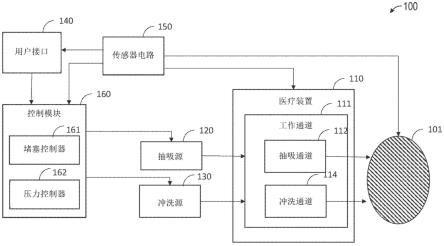
35.图1是示出用于在微创手术期间原位疏通内窥镜的工作通道并将解剖部位处的解剖环境的压力维持在基本上期望的水平的系统的示例的框图。
36.图2a至图2b是示出了可以在如参照图1描述的系统中使用的动力组织移除装置200的图。
37.图3a至图3b是示出用于在内窥镜手术期间疏通阻塞的通道并将解剖环境的压力维持在基本上期望的水平的内窥镜系统的图。
38.图4a示出了根据本文所讨论的实施方式的用于疏通内窥镜的阻塞的工作通道的示例性技术。
39.图4b至图4c是示出在存在堵塞的情况下和在疏通过程期间工作通道中的流量变化的图。
40.图5是示出在不存在通道堵塞的情况下调节环境压力的示例性反馈控制压力调节系统的图。
41.图6a是示出在抽吸通道中存在堵塞的情况下调节环境压力的示例性反馈控制压力调节系统的图。
42.图6b是在阻塞的抽吸通道的疏通期间启用抽吸通道中的冲洗/抽吸的时序图。
43.图6c是在阻塞的抽吸通道的疏通期间启用冲洗通道中的冲洗/抽吸以在解剖部位处维持期望的压力的时序图。
44.图7a是示出在冲洗通道中存在堵塞的情况下调节环境压力的示例性反馈控制压力调节系统的图。
45.图7b是在阻塞的冲洗通道的疏通期间启用冲洗通道中的冲洗/抽吸的时序图。
46.图7c是在阻塞的冲洗通道的疏通期间启用抽吸通道中的冲洗/抽吸以在解剖部位处维持期望的压力的时序图。
47.图8是示出用于在微创手术期间原位疏通医疗装置中的工作通道的方法的流程图。
48.图9是示出用于原位疏通医疗装置的工作通道并将解剖部位处的解剖环境的压力维持在基本上期望的水平的方法的流程图。
具体实施方式
49.内窥镜包括可插入至身体的器官或腔的内部中的管状部分,以帮助诊断或治疗。一个或更多个工作通道(例如,抽吸通道和/或冲洗通道)可以设置在管状部分的内部并且沿着管状部分的长度延伸。为了降低损伤非预期组织的风险,可插入管状部分可以具有小直径。因此,工作通道也具有小的管腔直径。由于组织碎片和异物(例如,结石及其碎屑)通常具有长度为一到两个管腔直径的尺寸,因此一些组织或结石颗粒会积聚并且堵塞工作通道。
50.在本文中,“堵塞(clog)”是指组织碎片、结石(例如,肾结石或结石碎屑)和其他物质积聚并且部分或完全阻塞通道管腔,并且“堵塞(clogging)”是指通道管腔部分或完全阻塞的状态。内窥镜的任何工作通道都可能发生堵塞。抽吸通道中的堵塞可能会显著降低通过其移除组织碎片和结石碎屑的效率。从解剖部位延迟或低效地移除不想要的物质可能会抑制或阻止进一步的治疗(例如,清创或结石消融),污染解剖部位,并且使患者面临增加的风险。另一方面,冲洗通道中的堵塞可能会减少流经其中并供应至解剖环境的冲洗流体的体积和/或流率。缓慢的冲洗流在从解剖部位冲刷掉不想要的物质方面可能效率较低,并且
增加了抽吸通道中堵塞的可能性。减少的冲洗体积和流率也可能影响其对外科手术构件和解剖环境的冷却效果,并且增加解剖部位处的热积聚的机会。此外,任何工作通道中的堵塞都可能阻塞内窥镜的透镜,削弱被检查对象的可见性,并且降低在解剖环境下拍摄的图像质量,从而增加手术难度和时间。
51.抽吸和冲洗可以分别致使解剖部位处的解剖环境的负压变化和正压变化。如果控制不当,负压变化和正压变化可能对暴露于解剖部位的内部器官有害。例如,虽然身体可以调节一些正压变化,但是许多器官对负压变化是相对无防御的。工作通道(例如,抽吸通道或冲洗通道)中的堵塞可能会破坏与流体流动相关联的正压和与抽吸相关联的负压之间的压力平衡,从而使解剖部位处的内部器官暴露于有害的过大正压或负压。
52.已经尝试了各种方法来防止或解决内窥镜中的通道堵塞。例如,将不想要的物质(例如,组织碎片或结石碎屑)破碎成更细的片可以降低通道中堵塞的可能性。然而,这可能会消耗更多能量,花费更长的手术时间,并且由于增加的手术复杂性和时间而潜在地增加患者风险。细颗粒或结石粉末可能会降低外科手术区域的可见性。常规地,疏通通常在外部进行,这需要临床医生从身体中缩回该镜,冲刷被阻塞的镜以使其疏通,并且将经冲洗的镜插回至解剖部位。这种方法增加了手术时间,给临床医生添加了不便,并且可能增加患者的外科手术风险。当内窥镜保持插入并且保持在适当的位置时,工作通道的原位疏通通常需要高压冲洗,这可能会对内部器官施加过大的正压。
53.本发明人已经认识到内窥镜系统的未满足的需求:能够自动监测和稳定期望的内部压力,同时使得用户输入流率(例如,抽吸流率和/或冲洗流率)能够保护内部器官免受压力相关危害。
54.出于至少以上原因,本发明人已经认识到系统和方法的未满足的需求:能够检测工作通道中的堵塞状态,疏通阻塞的通道,并且增加内窥镜手术的效率、安全性和成功率,同时在手术的持续时间内保持解剖环境上的压力变化处于控制之下。
55.本文公开了在内窥镜手术期间的内窥镜中的工作通道例如冲洗通道或抽吸通道的原位疏通的系统和方法。根据本文献的一个方面,疏通系统可以使用由流量传感器感测的流量信息来检测指示工作通道中存在或不存在堵塞的通道状态,通过例如以交替的方式向该工作通道施加冲洗流体或抽吸压力来疏通阻塞的通道。疏通系统可以调节通过内窥镜内部的一个或更多个通道的冲洗流率或抽吸流率中的一个或更多个,以在手术的持续时间内保持解剖环境的压力处于控制之下,例如维持基本上净零压力,或者由用户指定的期望正压或期望负压。
56.根据本文献中讨论的各种实施方式的疏通系统和方法为内窥镜手术期间的内窥镜的原位疏通提供了改进的解决方案。根据如本文所述的各个方面,本系统和方法为用户提供内窥镜检查,而无需重复插入和移除内窥镜附件和配件以进行外部冲刷和疏通。与经由可能使内部器官处于高正压风险下的高压冲洗的疏通相比,如本文献中讨论的,例如以交替的方式施加至同一堵塞通道的受控的冲洗和抽吸提供了内部器官的环境稳定性。本疏通系统的各种实施方式可以通过有效地分离积聚和阻塞通道的不同尺寸的堵塞颗粒来疏通通道,同时避免内部器官上的危险的正压变化或负压变化或者使内部器官上的危险的正压变化或负压变化最小化。因此,可以安全且更有效地从解剖部位移除不想要的物质,而在低创手术中,可以减少手术时间,并且可以提高患者安全性和患者恢复时间。
57.图1是示出系统100的示例的框图,该系统用于在患者的微创手术期间原位疏通内窥镜的工作通道,同时将解剖部位处的解剖环境101的压力维持在基本上期望的水平。系统100可以包括医疗装置110和可选部件。可选部件可以包括抽吸源120、冲洗源130、用户接口140、传感器电路150或控制模块160中的任何一个。在各种示例中,系统100可以具有提供增强的灵活性以允许容易配置和替换单个部件的模块化设计。在示例中,用户接口140、传感器电路150和控制模块160可以被包括在抽吸/冲洗控制单元中。抽吸/冲洗控制单元可以流体地耦接至装置110、抽吸源120或冲洗源130中的一个或更多个。抽吸/冲洗控制单元可以适应不同类型的医疗装置以及不同类型的冲洗源和抽吸源。下面参照图3a至图3b讨论示例性抽吸/冲洗控制单元。抽吸/冲洗控制单元可以选择性地启用或停用通过工作通道111的冲洗和/或抽吸,并且调节冲洗流率、冲洗流体压力、抽吸流率或抽吸压力中的一个或更多个。通过根据本文所讨论的各种实施方式控制抽吸和/或冲洗,阻塞的通道可以被疏通,并且解剖环境101的压力可以在手术期间维持在期望的水平处。
58.医疗装置110可以用于诊断、分析或治疗应用,包括例如微创外科手术诸如内窥镜手术。作为示例而非限制,医疗装置110可以用于关节外科手术、整形外科手术、包括但不限于鼻窦外科手术和扁桃体切除术的各种耳鼻喉科手术或其组合。医疗装置110可以由用户控制以在解剖环境101中的器官中执行手术或者移除器官组织。医疗装置110的控件可以包括手持件或者例如经由机器人外科手术控制台或用户接口的间接控件。
59.医疗装置100的示例可以包括组织移除装置,该组织移除装置包括刀片组件,该刀片组件被配置成旋转和/或往复运动以从目标解剖结构切除不想要的组织。刀片组件可以由马达驱动,该马达由手持件内部或替选地手持件外部的能量源供电。能量源还可以实现其他功能,例如向医疗装置110提供动力冲洗和抽吸,如要在下面所讨论的。可以使用各种刀片组件,包括例如剃须刀、清创器、刀片或骨钻等。根据所使用的刀片组件,组织移除装置可以用于在目标解剖结构处或从目标解剖结构中刮削、切割、磨耗或以其他方式移除坏死、癌变、受损、感染或其他不想要的软组织、骨骼或其他解剖特征或对象。下面参照图2a至图2b讨论示例性组织移除装置。
60.医疗装置110的另一示例可以包括内窥镜。内窥镜的示例可以包括:用于检查膀胱的膀胱镜;用于检查肾的肾镜;用于检查支气管的支气管镜;用于检查关节的关节镜;用于检查结肠的结肠镜;用于检查胆道区域(例如,胆管)的胆道镜;用于检查胃肠区域的十二指肠镜;或者用于检查腹部或骨盆的腹腔镜等。内窥镜可以包括用于照亮解剖部位处的解剖环境的光源,以及用于在内窥镜手术期间产生解剖环境的图像或视频的成像模块。一些内窥镜例如内窥镜组织移除装置可以包括组织切除构件,该组织切除构件被配置成从目标解剖结构中刮削、切割、磨耗或以其他方式移除不想要的组织部分。然后可以从解剖部位中提取切除的组织碎片。一些内窥镜可以包括消融构件,该消融构件被配置成从解剖环境中破碎或移除异物,例如晶体矿物结构。例如,肾镜可以至少部分地插入至肾中。超声波能量、电磁冲击波或激光以及其他能量形式可以递送至肾结石,以将它们破碎成碎屑或“结石粉末”,然后可以从解剖部位中提取碎屑或“结石粉末”。下面参考图3a至图3b讨论示例性内窥镜。
61.医疗装置110可以包括一个或更多个工作通道111,所述一个或更多个工作通道用于输送在本文中统称为“不想要的物质”的经刮削、经切割、经切除、经磨耗或经移除的组
织、骨骼或其他解剖特征或对象、结石和物质的碎屑、解剖部位处的体液、以及冲洗流体。工作通道111可以选择性地耦接至抽吸源120(例如,经由医疗装置110上的抽吸端口)或冲洗源130(例如,经由医疗装置110上的冲洗端口)中的一个或更多个。
62.抽吸源120可以用于从解剖部位抽出、抽取、吸出、吸取或以其他方式移动或移除不想要的物质。不想要的物质可以被移动至在医疗装置110的近端、手持件内部或远离医疗装置110的位置定位的接纳器中。在示例中,手持件可以包含用于在手持件被清洁和收集的物质被移除之前至少暂时收集不想要的物质的容器或储存器。抽吸源120可以通过生成真空、抽吸或负压并将所述真空、抽吸或负压施加至医疗装置110的工作通道111来执行前述功能。在示例中,抽吸源120可以与医疗装置110分离,并且经由一个或更多个管、线或软管连接至医疗装置110。在另一示例中,抽吸源120可以被包括在医疗装置110中或者附接至医疗装置110。例如,抽吸源120可以被包含在组织移除装置或内窥镜的手持件内。抽吸源可以由也为医疗装置供电的能量源供电,或者可以由其自身的能量源供电。
63.冲洗源130可以用于向工作通道111提供冲洗流体,以帮助通过工作通道111移除不想要的物质(例如,组织碎片或结石碎屑)。冲洗流体还可以在旋转或往复清创或切除期间使组织移除装置或切除元件冷却,并且有助于消散在结石碎裂期间生成的热。冲洗流体可以被重力馈送或加压。在示例中,冲洗源可以包括相对于医疗装置111和解剖部位升高的袋以产生经重力馈送的冲洗流体。在另一示例中,泵可以产生加压的冲洗流。冲洗流体可以从冲洗源130或包含冲洗流体的位置提供至外部流体供应管并且通过外部流体供应管,并且被抽入工作通道111中。在由抽吸源120提供的抽吸压力下,冲洗流体可以与不想要的物质一起流向工作通道111的近端方向并且从解剖部位移除。
64.在示例中,单个工作通道111可以用于冲洗和抽吸两者。控制模块160可以在不同时间处可控地启用通过工作通道111的冲洗和抽吸。在另一示例中,医疗装置110可以包括两个或更多个分离的工作通道,例如抽吸通道112和冲洗通道114,如图1所示。抽吸通道112可以可控地连接至抽吸源120,以引导通过其抽吸不想要的物质。冲洗通道114可以可控地连接至冲洗源130,以引导冲洗流体通过其中。在示例中,抽吸通道112可以可控地连接至冲洗源130。在示例中,冲洗通道114可以可控地连接至抽吸源120。根据本文所讨论的各种示例的冲洗和抽吸可以用于帮助移除不想要的物质、疏通一个或更多个工作通道、传递在组织部位的手术区间生成的热、将解剖环境的压力维持在期望的水平、以及在工作通道中维持与期望的压力对应的期望的流量状况等。
65.在示例中,抽吸通道112和冲洗通道114可以沿着医疗装置110的手持件的管状部分的长度以平行取向设置。在示例中,抽吸通道112和冲洗通道114可以例如以嵌套配置与公共轴同轴地设置。在示例中,医疗装置110包括外构件和位于外构件内的内构件。抽吸通道112可以位于内构件的内部。冲洗通道114可以位于外构件的外部。在一些配置中,除了通过冲洗通道114供应冲洗流体之外或者代替通过冲洗通道114供应冲洗流体,可以通过限定在医疗装置110的内构件与外构件之间的间隙(在下文中称为“冲洗间隙”)来供应冲洗流体。冲洗通道114或冲洗间隙中的一个可以被选择性地启用以向医疗装置110供应冲洗流体。在一些示例中,冲洗通道114和冲洗间隙两者都可以被启用以同时供应冲洗流体。这可以有利地允许临床医生调节在手术期间使用多少冲洗流体。例如,当产生更多的组织碎片或结石碎屑时,或者在通道中检测到堵塞的情况下,冲洗通道114和冲洗间隙两者都可以被
启用以向医疗装置110提供更大体积的流体。
66.控制模块160可以被配置成控制医疗装置110的操作,包括在内窥镜手术期间的组织切除或结石消融、照明、成像、冲洗以及抽吸等功能中的一种或更多种。在示例中,控制模块160可以被实现为微处理器电路的一部分,该微处理器电路例如是用于处理信息、生成控制信号以启用、停用或改变系统100的部件的操作的专用处理器、专用集成电路(asic)、微处理器或其他类型的处理器。替选地,微处理器电路可以是可以接收和执行用于执行本文所描述的功能、方法或技术的指令的处理器。
67.控制模块160可以至少部分地实现在诸如图3a至图3b所示的与医疗装置110分离的单元中。替选地,控制模块160的部分可以被集成至医疗装置110中或者以其他方式附接至医疗装置110。在一些示例中,控制模块160可以包括单独或组合地执行本文所描述的功能、方法或技术的电路组。在示例中,电路组的硬件可以包括不变地连接的部件,其被设计成执行特定操作(例如,硬接线)。在示例中,电路组的硬件可以包括可变地连接的物理部件(例如,执行单元、晶体管、简单电路等)以对特定操作的指令进行编码,所述可变连接的物理部件包括物理地修改的(例如,不变的集结的粒子的磁性地电地可移动的放置等)计算机可读介质。在连接物理部件时,硬件组成部分的基本电特性被改变,例如从绝缘体改变为导体或者从导体改变为绝缘体。所述指令使得嵌入式硬件(例如,执行单元或加载机制)能够经由可变连接来创建硬件中的电路组的成员,以在操作时执行特定操作的部分。因此,当装置正在操作时,计算机可读介质通信地耦接至电路组成员的其他部件。在示例中,物理部件中的任何部件可以在多于一个电路组的多于一个成员中使用。例如,在操作下,执行单元可以在一个时间点在第一电路组的第一电路中使用,并且在不同的时间被第一电路组中的第二电路或者被第二电路组中的第三电路重复使用。
68.如图1所示,控制模块160可以耦接至用户接口140,并且从用户接口140接收用于启用、停用或调节医疗装置110的一个或更多个功能的用户命令。用户接口140可以至少部分地集成至医疗装置110中或者以其他方式附接至医疗装置110。替选地,用户接口140可以与医疗装置110分离,如图3a至图3b所示的示例性系统。用户接口140可以是移动的,并且可以附接至医疗装置110和流体系统(例如,泵、冲洗)。在示例中,用户接口140可以包括允许用户(例如,临床医生)打开或关闭抽吸或者调节抽吸流率或抽吸压力的一个或更多个用户控件。用户控件可以位于与医疗装置110分离的移动用户接口上。替选地,用户控件可以位于医疗装置110例如组织移除装置例如图2a所示的装置或内窥镜的手持件上。响应于用户命令,控制模块160可以启用或停用来自抽吸源120的抽吸流,或者增加或减少施加至工作通道111的抽吸压力以实现期望的抽吸流率。类似地,用户接口140可以包括允许用户打开或关闭冲洗或者调节冲洗流率或冲洗流体压力(例如,经由泵)的一个或更多个用户控件。响应于用户命令,控制模块160可以启用或停用来自冲洗源130的冲洗流,或者增加或减少通过工作通道111的冲洗流率。
69.在一些示例中,用户接口140上的用户控件可以包括可按压冲刷控制按钮,其当被重复按下时,在关闭冲洗和抽吸之前循环通过一个或更多个冲洗水平和/或抽吸水平。在一些示例中,冲洗和抽吸可以用单个控件一起控制。也可以使用其他合适的控制元件,例如可以指定冲洗水平和/或抽吸水平的可定位的滑动件、可定位的杆或可定位的刻度盘。在一些示例中,用户接口140可以允许用户从多个指定的离散冲洗水平或抽吸水平之一进行选择,
或者替选地以连续(例如,非离散)的方式指定冲洗水平或抽吸水平。
70.除了对抽吸和冲洗的独立控制之外或者代替对抽吸和冲洗的独立控制,控制模块160可以基于冲洗或抽吸中的一个的情况自动控制冲洗或抽吸中的另一个。在示例中,控制模块160可以在医疗装置通电时或在冲洗源130向医疗装置110供应冲洗流体时自动打开抽吸;并且控制模块160可以在医疗装置未通电时或在冲洗源130停止向医疗装置110供应冲洗流体时自动关闭抽吸。在示例中,控制模块160可以响应于抽吸流率自动调节冲洗流率或流体体积(例如,通过启用或停用限定在内构件与外构件之间的冲洗间隙中的流)。例如,在增加的抽吸下(例如,由于要移除大量不想要的物质),控制模块160可以自动增加冲洗流率,或者经由冲洗通道114和冲洗间隙两者供应冲洗流体。相反地,在减少的抽吸下(例如,由于要移除少量不想要的物质),控制模块160可以自动降低冲洗流率,或者仅经由冲洗通道114或冲洗间隙中的一个而不是冲洗通道114或冲洗间隙两者供应冲洗流体。
71.控制模块160可以包括堵塞控制器161,该堵塞控制器被配置成检测指示工作通道111中存在或不存在堵塞的通道状态,并且控制抽吸源120或冲洗源130中的一个或更多个,以分别提供抽吸压力或冲洗流体来疏通阻塞的工作通道。在示例中,堵塞控制器161可以监测通道状态,并且基于工作通道111中的流量信息来检测通道堵塞。传感器电路150可以包括耦接至流量传感器的电路,该流量传感器被定位在工作通道111内部并且被配置成感测其中移动液体的流率或体积。诸如微机电系统(mems)传感器的流量传感器可以采用各种流量测量技术。作为示例而非限制,流量传感器可以包括:测量从热源生成的热的传递速率的热风速计;测量一系列位置上的压降的差压传感器;测量频移或行程/飞行时间的多普勒效应的超声波流量传感器;测量指示流率的流体电导变化的电磁传感器等。
72.堵塞控制器161可以使用由流量传感器感测的流量信息来检测通道堵塞。在示例中,堵塞控制器161可以响应于感测到的流率降低至例如低于第一流率阈值来检测通道堵塞;并且如果感测到的流率增加并且超过第二流率阈值,则堵塞控制器161可以检测到不存在堵塞或者成功疏通阻塞的工作通道。在另一示例中,例如当流率测量的可变性超过阈值时,可以使用通道内部的流率稳定性来检测通道堵塞。在一些示例中,堵塞控制器161可以通过将进入通道的流体的流入速率和离开通道的流体的流出速率进行比较来检测通道堵塞。流入速率与流出速率之间的不匹配例如流出速率显著低于流入速率(超过指定的容差)指示存在通道堵塞。
73.在存在通道堵塞的情况下,堵塞控制器161可以从如上所讨论的冲洗/抽吸操作的标准模式(例如,在抽吸源120向抽吸通道112提供抽吸压力并且冲洗源130向冲洗通道114提供冲洗流体的流的情况下)自动切换至冲洗/抽吸操作的疏通模式。为了疏通阻塞的通道,堵塞控制器161可以在向阻塞的通道施加冲洗流体与施加抽吸压力之间交替。现在参照图4a,其中的图示出了根据本文献中讨论的实施方式的通道疏通技术。图410示出了在由冲洗源140启用的冲洗的标准模式期间被堵塞物412阻塞的流体填充通道411。堵塞物412包括不同尺寸的组织碎片或结石碎屑。如图410所示,诸如颗粒412a的较小颗粒位于近端,而诸如颗粒412b的较大颗粒位于远端。图420示出了从标准模式切换至疏通模式,其中堵塞控制器161将抽吸源120流体地耦接至通道411的近端部分,启用抽吸源120,并且在指定的抽吸持续时间向通道411施加抽吸压力。用户可以经由用户接口140调节抽吸压力和抽吸持续时间。不同尺寸(因此不同质量)的堵塞颗粒可以对所施加的抽吸压力作出不同的响应。例如,
与较大颗粒412b相比,较小颗粒412a可以在施加抽吸期间(以及在施加抽吸之后)以更快的速度朝向通道的近端移动并且行进更长的距离。因此,一些颗粒可以从堵塞物412中移出并且与较大颗粒分离。
74.图430示出了在由抽吸源120启用的抽吸的标准模式期间被堵塞物413阻塞的流体填充通道411。堵塞物413的颗粒与堵塞物412不同地积聚,其中诸如颗粒413a的较小颗粒位于远端,而诸如颗粒413b的较大颗粒位于近端。图440示出了从标准模式切换至疏通模式,其中堵塞控制器161将冲洗源140流体地耦接至通道411的近端部分,启用冲洗源140,并且在指定的冲洗持续时间施加冲洗流体以冲刷通道411。用户可以调节冲洗流率或用于泵送冲洗流体的压力以及冲洗持续时间。不同尺寸(因此不同质量)的堵塞颗粒可以对冲刷冲洗流体作出不同的响应。例如,与较大颗粒413b相比,较小颗粒413a可以在施加冲洗期间(以及在施加冲洗之后)以更快的速度朝向通道的远端移动并且行进更长的距离。因此,一些颗粒可以从堵塞物413中移出并且与较大颗粒分离。
75.可以使用附加的冲洗和/或抽吸来沿工作通道411提取分离的颗粒。在示例中,抽吸压力、抽吸流率、冲洗流率或用于对冲洗流体进行加压的泵压力中的一个或更多个可以改变(例如,经由用户接口140),以按尺寸分离出颗粒。例如,可以应用较高的流率来移除较大颗粒,以及可以应用较低的流率来通过通道411移除较小颗粒。
76.图4b至图4c是示出在存在堵塞的情况下和在疏通过程期间工作通道中的流变化的图。图4b示出了堵塞的冲洗通道中的流变化,如图4a的图410和图420所示。可以使用设置在冲洗通道中的流量传感器来测量流参数,例如流率。流量测量(在y轴上)具有在-1与1之间的值。正流量值表示朝向抽吸通道的远端(或者朝向解剖环境101,参见图4a的图410)的流方向。负流量值表示相反的方向,即朝向抽吸通道的近端(或者远离解剖环境101,参见图4a的图420)的流。流量测量的值与通过冲洗通道的畅通流相关。也就是说,流量值“1”表示在畅通通道的冲洗期间的流量,而流量值
“‑
1”表示在畅通通道的抽吸期间的流量。
77.在疏通的冲洗通道的冲洗的标准模式期间,流量传感器可以检测到值近似为“1”的正流量f0。如所示出的,流量f0包括叠加在恒定流量上的波动,指示小碎屑被抽吸。在t1处,流率降低至f1(小于f0)。如果下降f0-f1超过堵塞检测阈值,则检测到堵塞。在该示例中,f1处于大于零的水平,指示通道没有被完全阻塞,并且继续冲洗。颗粒继续堆积,直至流率在t2处下降至f2。f2近似为零,指示基本通道阻塞(如图4a的图410所示)。可以在t2处或在与特定(例如,用户指定的)流量条件相对应的时间处启用疏通模式。可以对阻塞的通道施加抽吸,将其中的流体和物质吸向抽吸通道的近端(如图4a的图420所示)。流量传感器可以感测到负流量f3。如上面参照图4a的图420所讨论的,抽吸可以分解堵塞物,使得较小尺寸的颗粒可以与堵塞物的其余部分分离,并且朝向通道的近端行进更长的距离。当通道被疏通时,可以继续抽吸,从而使得负流量f3能够在t3处达到近似最大值(
“‑
1”,指示基本上畅通的流量)。在指定的抽吸时间段内施加抽吸并且将将移出的颗粒从通道中提取出之后,可以在t4处停止抽吸。负流率然后可以降低至基本上为零的流量f4。在t5处,通过向疏通的通道施加冲洗流体来恢复标准冲洗模式。当通道成功疏通并且从通道中移除颗粒时,流量传感器可以感测到值近似为“1”的正流量f5。
78.图4c示出了堵塞的抽吸通道中的流变化,如图4a的图430和图440所示。可以使用设置在抽吸通道中的流量传感器来测量流参数,例如流率。流量测量(在y轴上)具有在
–
1与
1之间的值。正流量值表示朝向抽吸通道的近端(或者远离解剖环境101,参见图4a的图430)的流方向。负流量值表示相反的方向,即朝向抽吸通道的远端(或者朝向解剖环境101,参见图4a的表440)的流。流量测量的值与通过抽吸通道的畅通流相关。也就是说,流量值“1”表示在畅通通道的抽吸期间的流量,而流量值
“‑
1”表示在畅通通道的冲洗期间的流量。
79.在施加至疏通的抽吸通道的抽吸的标准模式期间,流量传感器可以检测到值近似为“1”的正流量f0。如所示出的,流量f0包括叠加在恒定流量上的波动,指示小碎屑被抽吸。在t1处,流率降低至f1(小于f0)。如果下降f0-f1超过堵塞检测阈值,则检测到堵塞。在该示例中,f1处于大于零的水平,指示通道没有被完全阻塞,并且继续抽吸。颗粒继续堆积,直至流率在t2处下降至f2。f2近似为零,指示基本通道阻塞(如图4a的图430所示)。可以在t2处或在与特定(例如,用户指定的)流量条件相对应的时间处启用疏通模式。冲洗流体可以朝向抽吸通道的远端并朝向解剖环境注入至阻塞的通道中(如图4a的图440所示)。流量传感器可以感测到负流量f3。如上面参照图4a的图440所讨论的,冲洗流体可以分解堵塞物,使得较小尺寸的颗粒可以与堵塞物的其余部分分离,并且朝向通道的远端行进更长的距离。在通道被疏通时,继续进行冲洗,从而使得负流量f3能够在t3处达到近似最大值(
“‑
1”,指示基本上畅通的流量)。在指定的冲洗时间段内施加冲洗之后,可以在t4处停止冲洗。当分离的颗粒在通道中沉降时,负流率然后可以降低至基本上为零的流量f4。在t5处,通过施加附加的抽吸以将分离的颗粒从通道中提取出来恢复标准抽吸模式。当通道成功疏通并且从通道中移除颗粒时,流量传感器可以感测到值近似为“1”的正流量f5。
80.在一些示例中,抽吸压力和冲洗流体可以以交替方式重复地施加至通道411。这允许更有效地分离堵塞物的颗粒,而无需预先知道或无需确定堵塞物412的结构。此外,持续施加抽吸并且然后偶尔冲洗可以有助于减少堵塞物形成的发生率。传感器电路150可以在重复施加交替抽吸和冲洗的同时监测流率。只要通道堵塞仍然存在,就可以继续进行疏通操作,包括向阻塞的通道施加冲洗流体或抽吸压力。当监测到的流率增加并且超过阈值时,阻塞的通道被视为成功疏通。堵塞控制器161可以从疏通操作模式切换回冲洗/抽吸操作的标准模式。
81.返回参照图1,控制模块160可以包括压力控制器162,该压力控制器162被配置成保持解剖环境的压力(也被称为“环境压力”)处于控制之下,例如将环境压力维持在基本上期望的压力水平(例如,预定水平,或由用户经由用户接口140所指定的)。在示例中,如果环境压力测量(例如,通过压力传感器测量的)与期望的压力之间的差落入容差范围内例如作为非限制性示例为
±
5%至10%,则认为环境压力维持在期望的压力水平。可以从用户接口140接收要在解剖环境101的解剖部位处维持的期望压力水平。如前所述,抽吸可以导致解剖部位处的负压力变化,而冲洗可以导致解剖部位处的正压力变化。负压力变化和正压力变化可能对暴露于解剖部位的内部器官造成不利影响。将环境压力维持在受控压力水平处可以提高患者安全性并且有效减少手术时间。在一些示例中,除了接收期望的压力水平之外或者代替接收期望的压力水平,可以例如从用户接口140接收期望的流量状况。期望的流量状况包括关于流入(例如,施加至解剖环境的冲洗流体的流率)相对于流出(例如,施加至解剖环境的抽吸的流率)的信息。期望的流量状况对应于要施加至解剖环境的期望压力。例如,流入速率和流出速率基本上相等的期望流量状况对应于基本上净零的环境压力,流入速率高于流出速率的期望的流量状况对应于正环境压力,以及流入速率低于流出速率的期
望的流量状况对应于负环境压力。压力控制器162可以控制通过一个或更多个工作通道的冲洗流率或抽吸流率中的一个或更多个,以在手术期间维持期望的流量状况。
82.压力控制器162可以通过自动地启用、停用或调整抽吸或冲洗中的一个或更多个来实现受控的压力。传感器电路150可以在内窥镜手术期间监测解剖环境的压力(“环境压力”)。在示例中,传感器电路150可以耦接至压力传感器,以感测环境压力或者感测指示环境压力或以其他方式与环境压力相关的信号。压力传感器的示例可以包括电阻式压力传感器、电容式压力传感器、压电式压力传感器、光学式压力传感器或微机电系统(mems)压力传感器。在示例中,压力传感器可以附接至或集成到医疗装置110的远端部分例如内窥镜的可插入管状部分的远端末端,使得压力传感器与解剖环境101接触。在示例中,压力传感器可以定位在内窥镜的管状部分内部的远离解剖环境101的较近端位置处。控制模块160可以从用户接口140接收在手术期间要维持的期望环境压力。控制模块160可以将感测到的环境压力与期望的环境压力进行比较,并且调整冲洗流率或抽吸流率中的一个或更多个,以将环境压力向期望的环境压力水平驱动。
83.当系统100在冲洗/抽吸的标准模式下操作(当在任何工作通道中都没有检测到堵塞时)以及在冲洗/抽吸的疏通模式下操作(当至少一个但不是全部工作通道堵塞时)时,压力控制器162可以维持受控的环境压力。以下参照图5(在没有通道堵塞的情况下)以及图6至图7(在存在通道堵塞的情况下)讨论用于经由抽吸流率和/或冲洗流率的自动调整来调节环境压力的示例性系统。
84.用户接口140可以包括输出单元例如显示器,以呈现在内窥镜手术期间收集的信息,所述信息例如包括:外科手术区域的图像(包括实况视频);医疗装置110的操作状态,包括工作通道111的状态;关于通道状态的信息,例如堵塞通道或成功疏通;以及如由传感器电路150感测到的环境压力等。
85.图2a示出了作为医疗装置110的示例的动力组织移除装置200的透视图。动力组织移除装置200可以包括手持件210和从手持件210延伸的管状组件222。管状组件222包括位于手持件210处的近端部分226和相对的远端部分228。尽管远端部分228被示为与管状组件222的其余部分对齐的“直轴”,但在一些示例中,远端部分228可以相对于管状组件222的其余部分(包括近端部分226)弯曲或成角度。
86.图2b中示出了远端部分228的示例性配置。管状组件222包括外管状构件252和位于外管状构件252内部的内管状构件254。外构件252包括外构件窗口262。内构件254包括切割部分264和限定在内构件254内部的抽吸通道274。内构件254或切割部分264包括与抽吸通道274连通的内构件窗口266。
87.动力组织移除装置200包括位于外构件252的外部或位于外构件252之外的冲洗通道272。冲洗通道272沿外构件252的长度延伸。冲洗通道272的近端端部包括与冲洗源230流体连通的近端冲洗端口282,并且冲洗通道272的远端端部包括附接至动力组织移除装置200或外构件252的远端冲洗端口284。
88.动力组织移除装置200可以耦接至能量源240、抽吸源220和冲洗源230。能量源240被配置成向动力组织移除装置200、抽吸源220、冲洗源230或其组合供电。作为抽吸源120的实施方式的抽吸源220可以与限定在内构件254内部的抽吸通道274流体连通。抽吸源220被配置成经由抽吸通道274向动力组织移除装置200施加抽吸或从动力组织移除装置200抽真
空。作为冲洗源130的实施方式的冲洗源230可以与位于外构件252的外部或位于外构件252之外的冲洗通道272流体连通。可替选地或另外地,冲洗源230可以与内构件254与外构件252之间的间隙流体连通。
89.动力组织移除装置200包括用于操作动力组织移除装置200、能量源214、抽吸源220、冲洗源230或其组合的一个或更多个用户控件224。作为示例而非限制,作为用户接口140的实施方式的用户控件224可以位于手持件210处,以允许由用户在手术期间容易地进行访问和操纵。在示例中,用户控件224可以允许用户手动地控制清创,启用、停用或调整冲洗流率或抽吸流以及其他冲洗或抽吸参数中的一个或更多个。
90.动力组织移除装置200包括至少部分地位于手持件210内部的控制模块(未示出)。可以是控制模块160的实施方式的控制模块可以被配置成:响应于来自用户控件240的用户命令来控制动力组织移除装置200的操作,包括组织清创、冲洗、抽吸以及其他功能中的一个或更多个。在示例中,控制模块可以基于从工作通道感测到的流率来检测工作通道(例如,一体的冲洗/抽吸通道,或者单独的冲洗通道或单独的抽吸通道)中的堵塞,并且例如通过在向阻塞的通道施加冲洗流体与施加抽吸压力之间交替来疏通阻塞的通道。控制模块可以启用并调整冲洗流参数中的一个或更多个或一个或更多个抽吸流参数,以使解剖环境的压力(“环境压力”)保持在控制下,例如在手术期间将环境压力维持在基本上用户指定的期望压力,如以上参照图1所讨论的。
91.图3a至图3b作为示例分别示出了用于在内窥镜手术中使用的内窥镜系统300a和300b。内窥镜系统300a和300b是系统100的实施方式。参照图3a,系统300a包括内窥镜310a、抽吸源320、冲洗源330和抽吸/冲洗控制单元340。作为医疗装置110的示例的内窥镜310a可以延伸至护套中,包括从远端端部延伸至集线器312的管311。集线器312在近端端部处终止。内窥镜310可以包括光端口314和可视端口315。光端口314可以用于将光提供到内窥镜中并使光从内窥镜的管311出来,使得解剖环境中感兴趣的特征(例如,切除的组织或结石和物质)被照亮。例如,当感兴趣的特征位于弱光条件下时,光端口有利于增强可见度。可视端口315可以用于提供使用户能够观察感兴趣的特征的观察窗口。在示例中,可视端口315可以是近端端部处的光学窗口,其提供对远端端部处的观察透镜的可视访问。在另一示例中,可视部分315可以提供与相机的连接点,以拍摄感兴趣的特征以及解剖环境的图像或视频。可以输出所述图像或视频并将其显示在监测器上。
92.内窥镜310a可以包括用于接收抽吸或冲洗流体的冲洗/抽吸端口313。冲洗/抽吸端口313可以位于集线器312的外部或内窥镜310a上的其他位置,例如内窥镜310a的近端端部。冲洗/抽吸端口313向管311内部的工作通道(未示出)开放。工作通道可以被定尺寸、定形状并且配置成输送冲洗流体以及/或者用于抽吸。在示例中,同一工作通道可以用于冲洗和抽吸(也称为一体冲洗/抽吸通道)。在另一示例中,冲洗通道和抽吸通道分别设置在管311内。
93.在示例中,内窥镜310可以是肾镜。在使用期间,管311的柔性远端部分可以以外科手术的方式插入到患者的肾脏中。管311的近端部分可以留在患者身体之外。管311内部可以包括沿着内窥镜310的长度延伸的光纤。光纤可以是多模光纤或单模光纤。肾镜外部的激光器可以生成激光束。激光束可以经由合适的连接器耦接至光纤的近端端部中。光纤可以将激光束递送至肾结石以将肾结石消融成碎片。在一些示例中,激光束可以具有与人类血
液和生理盐水的吸收光谱峰值相对应的波长,例如2100nm、1942nm等。总体上,递送在血液和生理盐水中具有显著吸收的激光束会是有益的,这是因为这样的激光束可以对周围组织微创,这可以降低或消除对肾结石处或肾结石附近的组织的损伤。激光器控制器可以位于内窥镜310的可抓握的近端部分上。类似于如图2a所示的使得能够手动控制清创的用户控件224,激光器控制器可以使用户能够将激光束的状态在操作状态(“开”)与非操作状态(“关”)之间切换。在一些示例中,用户可以在激光器的壳体上而不是经由激光器控制器来调整激光器的一个或更多个设置,例如输出功率。
94.抽吸/冲洗控制单元340可以在内窥镜手术期间向内窥镜310提供抽吸和冲洗,同时使解剖环境的压力保持在控制下,例如将压力维持在基本上用户指定的压力水平(例如,具有例如
±
5%至
±
10%的容差的用户指定的压力)。抽吸/冲洗控制单元340可以包括(作为传感器电路150的实施方式的)压力监测器、(作为控制模块160的实施方式的)控制模块、泵、电源。控制模块可以与例如位于抽吸/冲洗控制单元340的外部的(作为用户接口140的实施方式的)用户接口341进行通信,以控制控制模块。
95.抽吸源320可以经由外部抽吸线路326连接至抽吸/冲洗控制单元340。抽吸/冲洗控制单元340包括控制阀342,控制阀342被配置成控制抽吸源320与内窥镜310之间的抽吸,使得可以在冲洗流体的施加周期中的全部或一部分期间关断抽吸。冲洗源330可以经由外部冲洗线路336连接至抽吸/冲洗控制单元340。包括在抽吸/冲洗控制单元340中的泵可以在冲洗流体经由冲洗线路336进入内窥镜310之前对冲洗流体进行加压。如图3a所示,外部抽吸线路326和外部冲洗线路336可以在公共配件350处连接在一起,该公共配件350可以耦接至用于经由冲洗/抽吸端口313向内窥镜310供应流体或抽吸的公共线路356。
96.抽吸/冲洗控制单元340中的控制模块可以被配置成响应于来自用户接口341的用户命令来控制内窥镜310的操作。在示例中,控制模块可以基于从工作通道感测到的流率来检测工作通道(例如,一体的冲洗/抽吸通道、单独的冲洗通道或单独的抽吸通道)中的堵塞,并且例如通过交替施加冲洗流体和抽吸压力来疏通阻塞的通道。控制模块可以自动启用并调整冲洗流参数中的一个或更多个或一个或更多个抽吸流参数,以使解剖环境的压力(“环境压力”)保持在控制下,例如将环境压力维持在基本上用户指定的压力水平,如以上参照图1所讨论的。
97.如图3b所示的系统330b类似于系统330a,并且包括内窥镜310b、抽吸源320、冲洗源330和控制抽吸/冲洗控制单元340。类似于内窥镜310a,内窥镜310b可以包括管311、集线器312、光端口314和可视端口315。然而,内窥镜310b包括分别地适于与抽吸源320流体连通的单独的抽吸端口313a以及适于与冲洗源330流体连通的单独的冲洗端口313b,而不是单个冲洗/抽吸端口313。抽吸源320经由外部抽吸线路326流体耦接至抽吸端口313a。冲洗源330经由外部冲洗线路336流体耦接至冲洗端口313b。抽吸端口313a和冲洗端口313b可以各自对管311内部的一个或更多个工作通道开放。在示例中,冲洗通道和抽吸通道分别设置在管311内部。抽吸端口313a可以选择性地向抽吸通道或冲洗通道开放。类似地,冲洗端口313b可以选择性地向管311内部的抽吸通道或冲洗通道开放。
98.图5是示出作为系统100的环境压力控制部分的实施方式的示例性反馈控制压力调节系统500的图。系统500可以被配置成:在指示没有通道堵塞时,以及在系统500在冲洗/抽吸的标准模式下操作(例如,控制抽吸源120向抽吸通道112提供抽吸压力,以及控制冲洗
源130向冲洗通道114提供冲洗流体的流)时,调节解剖部位处的环境压力。系统500可以经由对相应的抽吸通道112和冲洗通道114中的抽吸和/或冲洗流率进行自动调整来调节环境压力。在示例中,抽吸通道112的纵轴和冲洗通道114的纵轴可以彼此平行。在示例中,可以例如以嵌套配置,利用公共轴同轴地设置抽吸通道112和冲洗通道114。在示例中,可以通过同一工作通道例如一体的冲洗/抽吸通道在不同时间施加冲洗和抽吸。压力监测器550可以经由压力传感器352监测解剖环境101的压力。作为示例而非限制,控制模块160可以包括比例积分(pi)控制器或比例积分微分(pid)控制器以及其他反馈控制器。(在压力监测器550处)感测到的压力与期望压力之间的差——也称为“误差”可以用于确定反馈控制器中的p项、i项或d项。
99.根据由用户提供的期望压力(或期望的流量状况),当期望压力为基本上净零(与施加到解剖环境的冲洗流体的流入速率和施加到解剖环境的抽吸的流出速率基本相等的期望的流量状况相对应)时,系统500可以在稳定压力模式下操作;或者当期望压力是正压力或负压力(与流入速率与流出速率之间的不平衡的期望的流量状况相对应)时,系统500可以在压力控制模式下操作。当在稳定压力模式下操作时,可以由用户例如经由用户接口140上各自的用户控件手动调整冲洗流率或抽吸流率。在内窥镜手术期间,冲洗流率的增加可以导致解剖部位处的环境压力增加,这可以被压力监测器550感测到。控制模块160可以通过向抽吸通道112施加抽吸压力来响应地启用抽吸。抽吸可以产生负压力以抵消由冲洗产生的增加的压力。控制模块160可以调整抽吸流率或抽吸压力,直到(由于增加的冲洗导致的)压力增加基本上被抽吸流中和。然后可以将环境压力向基本上为零驱动,并且使环境压力维持在基本上为零。
100.同样,抽吸流率的增加可以导致解剖部位处的环境压力减小。控制模块160可以通过向冲洗通道114提供冲洗流体的流来响应地启用冲洗。冲洗可以产生正压力以抵消由抽吸产生的减小的压力。控制模块160可以调整冲洗流率直到(由于增加的抽吸导致的)压力下降基本上被冲洗流中和。然后可以将环境压力向基本上为零驱动,并且使环境压力维持在基本上为零。
101.在某些情况下,期望的是在解剖部位处维持正环境压力或负环境压力。安全范围内的受控正压力可以有助于在内窥镜手术期间使解剖结构(例如,输尿管、肾脏、子宫或其他器官)扩张,以允许经由镜更好地观察解剖结构,而不会由于过大正压力而导致组织损伤。正压力还可以防止组织碎片或结石碎屑卡在解剖结构中,并且可以协助将其从解剖结构中移除。在一些情况下,在内窥镜手术期间将受控负压力维持在安全范围内也可以促进从解剖结构中提取碎片,而不会使内部器官处于过大负压力的风险中。
102.当由用户例如经由用户接口140提供正的期望环境压力时,系统400可以在压力控制模式下操作。控制模块160可以使通过冲洗通道114的冲洗流率自动地增加,以增加解剖部位处的正的环境压力。另外地或可替选地,控制模块160可以使通过抽吸通道112的抽吸流率自动地减小,以降低解剖部位处的负压力。可以继续进行冲洗和/或抽吸的自动调整,直到感测到的环境压力达到基本上期望正压力的水平。
103.同样,当由用户例如经由用户接口140提供负的期望环境压力时,系统400可以在压力控制模式下操作。控制模块160可以使通过抽吸通道112的抽吸流率自动地增加,以增加解剖部位处的负的环境压力。另外地或可替选地,控制模块160可以使通过冲洗通道114
的冲洗流率自动地减小,以降低解剖部位处的正压力。可以继续进行冲洗和/或抽吸的自动调整,直到感测到的环境压力达到基本上期望负压力的水平。
104.控制模块160可以包括安全机制,以将解剖环境的压力保持在由负压力下限和正压力上限限定的安全范围内。如果感测到的环境压力达到正压力的上限,则控制模块160可以自动地关闭、降低或维持当前的冲洗流的速率,以防止环境压力的进一步增加。同样,如果感测到的环境压力达到负压力的下限,则控制模块160可以自动地关闭、降低或维持当前的抽吸流的速率,以防止环境压力的进一步减小。当系统在压力控制模式下操作时,检查从用户接收的期望正压力和期望负压力,以确保其落入安全范围内。在非限制的示例中,期望正压力为5磅力每平方英寸(psi)(或约34.5千帕(kpa)),期望负压力为-5psi(或约-34.5kpa),并且安全范围在-6psi(或约41.4kpa)的下限与6psi(或约41.4kpa)的上限之间。在示例中,如果从用户接收的期望正压力超过正压力的上限,或者如果期望的负压力低于负压力的安全界限,则可以(例如,从用户接口140)发出警告。利用这样的安全机制,控制模块160可以将环境压力维持在用户指定的水平,同时防止在手术期间施加在解剖环境上的过度正压力或负压力,或使在手术期间施加在解剖环境上的过度正压力或负压力最小化。
105.图6a是示出作为系统100的实施方式的示例性反馈控制压力调节系统600的图。系统600可以被配置成在在抽吸通道112中存在堵塞的情况下调节解剖环境101的压力(“环境压力”)。如以上参照图4a所讨论的,当检测到抽吸通道112中的堵塞时,控制器模块160的堵塞控制器161可以从向抽吸通道112施加抽吸压力的标准模式(见图5)切换到疏通模式,在疏通模式下,冲洗源130流体耦接至抽吸通道112以向抽吸通道112提供冲洗流。
106.施加至抽吸通道112的冲洗流可以导致解剖部位处的解剖压力增加。控制模块160的压力控制器162可以经由自动调整通过抽吸通道112和冲洗通道114的抽吸流率和/或冲洗流率来调节环境压力。例如,响应于(例如由压力监测器550感测到的)环境压力增加,压力控制器162可以自动地向冲洗通道114施加抽吸压力。如果冲洗通道114没有堵塞,则冲洗通道114中所施加的抽吸可以对解剖环境101产生负压力以抵消由通过抽吸通道112的冲洗产生的压力增加。在示例中,压力监测器550可以连续地或周期性地监测环境压力,并且压力控制器162可以调整抽吸流率或抽吸压力,以将环境压力向期望压力的水平驱动。
107.在示例中,期望压力是基本上净零压力。压力控制器162可以调整冲洗通道114中的抽吸流率或抽吸压力,以基本上中和感测到的环境压力的增加。由此,可以将环境压力向基本上为零驱动,并且使环境压力维持在基本上为零。在另一示例中,期望压力是正压力。压力控制器162可以将冲洗通道114中的抽吸流率或抽吸压力调整到将感测到的环境压力向期望的正压力水平驱动的水平。期望正压力的示例是5磅力每平方英寸(psi),或约34.5kpa。在又一示例中,期望压力是负压力,并且压力控制器162可以将冲洗通道114中的抽吸流率或抽吸压力调整到将感测到的环境压力向期望的负压力水平驱动的水平。期望负压力的示例是-5psi,或等效地约-34.5kpa。
108.如以上参照图3a至图3b所讨论的,疏通可能涉及在向阻塞的通道施加抽吸与施加冲洗之间交替。图6b是当抽吸通道112中发生堵塞时启用抽吸通道中的冲洗/抽吸(如图7a所示)的时序图。为了疏通抽吸通道,向抽吸通道施加冲洗达持续时间t1(“冲洗持续时间”)。在过渡期td之后,向抽吸通道施加抽吸压力达持续时间t2(“抽吸持续时间”)。过渡期td使不同尺寸和质量的堵塞颗粒能够沿抽吸通道行进不同的距离,这有助于颗粒分离和通
道疏通。冲洗可以在解剖部位处引起正解剖压力( pa)661,而抽吸可以在解剖部位处引起负压力(-pa)662。
109.图6c是在疏通过程期间启用冲洗通道中的冲洗/抽吸以实现解剖部位处的压力控制、例如以维持期望的解剖压力的时序图。在t1期间,压力控制器162可以启用对冲洗通道114的抽吸,这可以产生负解剖压力(-pa)671以抵消解剖部位处的正解剖压力( pa)661。在t2期间,压力控制器162可以启用对冲洗通道114的冲洗,这可以产生正解剖压力( pa)672以抵消解剖部位处的负解剖压力(-pa)662。由此,可以在疏通阻塞的抽吸通道的同时将解剖环境的压力维持在期望水平。
110.当流量监测器650经由流量传感器652感测到通过抽吸通道112的流率增加时,确定阻塞的通道成功地被疏通。堵塞控制器161可以切换回冲洗/抽吸操作的标准模式(例如,控制抽吸源向抽吸通道施加抽吸压力,以及控制冲洗源向冲洗通道提供冲洗流体)。压力控制器162可以操作抽吸和冲洗以使环境压力保持在控制下,如以上参照图5所讨论的。
111.图7a是示出作为系统100的实施方式的示例性反馈控制压力调节系统700的图。系统700可以被配置成在冲洗通道114中存在堵塞的情况下调节施加在解剖环境101上的压力(“环境压力”)。如以上参照图4a所讨论的,当检测到冲洗通道112中的堵塞时,控制器模块160的堵塞控制器161可以从向冲洗通道114提供冲洗流体的标准模式切换到疏通模式,在疏通模式下,抽吸源120可以流体耦接至冲洗通道114以抽吸阻塞的冲洗通道114或将阻塞的冲洗通道114抽真空。
112.施加至冲洗通道114的抽吸压力可以导致解剖环境101的解剖部位处的压力减小。控制模块160的压力控制器162可以经由自动调整通过抽吸通道112和冲洗通道114的抽吸和/或冲洗流率来调节环境压力。例如,响应于(可以由压力监测器550感测到的)环境压力减小,压力控制器162可以自动地启用冲洗流体流入到抽吸通道112中。如果抽吸通道112没有堵塞,则抽吸通道112中施加的冲洗流体可以产生正压力,以抵消解剖环境101处的由通过冲洗通道114的抽吸产生的压力下降。在示例中,压力监测器550可以连续地或周期性地监测环境压力,并且压力控制器162可以调整冲洗流率以将环境压力向期望压力的水平驱动。
113.在示例中,期望压力是基本上净零压力。压力控制器162可以将通过抽吸通道112的冲洗流率调整到基本上中和感测到的环境压力的减小的水平。然后可以将如由压力感测器550感测到的环境压力向基本上为零驱动,或者使环境压力维持在基本上为零。在另一示例中,期望压力是正压力。压力控制器162可以将通过抽吸通道112的冲洗流率调整到将感测到的环境压力向期望的正压力水平驱动的水平。在又一示例中,期望压力是负压力,并且压力控制器162可以将通过抽吸通道112的冲洗流率调整到将感测到的环境压力向期望的负压力水平驱动的水平。
114.图7b是当冲洗通道114中发生堵塞时启用冲洗通道中的冲洗/抽吸(如图7a所示)的时序图。为了疏通冲洗通道,向冲洗通道施加抽吸达持续时间t3(“抽吸持续时间”)。在过渡期td之后,向冲洗通道施加冲洗压力达持续时间t4(“冲洗持续时间”)。过渡期td使不同尺寸和质量的堵塞颗粒能够沿冲洗通道行进不同的距离,这有助于颗粒分离和通道疏通。抽吸可以在解剖部位处引起负解剖压力(-pa)761,而冲洗可以在解剖部位处引起正解剖压力( pa)762。
115.图7c是在疏通过程期间启用抽吸通道中的冲洗/抽吸以实现解剖部位处的压力控制、例如以维持期望的解剖压力的时序图。在t3期间,压力控制器162可以启用对抽吸通道112的冲洗,这可以产生正解剖压力( pa)771以抵消解剖部位处的负解剖压力(-pa)761。在t4期间,压力控制器162可以启用对抽吸通道112的抽吸,这可以产生负解剖压力(-pa)772以抵消解剖部位处的正解剖压力( pa)762。由此,可以在疏通阻塞的冲洗通道的同时将解剖环境的压力维持在期望水平。
116.当流量监测器650经由流量传感器652感测到通过抽吸通道112的流率增加时,确定阻塞的通道成功地被疏通。堵塞控制器161可以切换回冲洗/抽吸操作的标准模式(例如,控制抽吸源向抽吸通道施加抽吸压力,以及控制冲洗源向冲洗通道提供冲洗流体)。压力控制器162可以操作抽吸和冲洗以使环境压力保持在控制下,如以上参照图5所讨论的。
117.图8是示出用于在诸如内窥镜手术的微创手术期间原位疏通医疗装置中的工作通道的方法800的流程图。医疗装置包括可插入到中空的器官或体腔内部以协助医疗诊断或外科手术治疗的管状部分。医疗装置的示例可以包括诸如图2a至图2b中所示的组织移除装置或诸如图3a至图3b中所示的内窥镜等。医疗装置可以包括一个或更多个工作通道,所述一个或更多个工作通道被配置成向解剖部位提供冲洗流体,以及将组织碎片、结石或块、体液和冲洗流体(本文中统称为不想要的物质)输送离开解剖部位。工作通道可以至少部分地位于医疗装置的管状部分内部。在示例中,工作通道是可控制地(例如,在不同时间)用于冲洗和抽吸的一体冲洗/抽吸通道。在另一示例中,工作通道可以包括设置在医疗装置的管状部分内的单独的冲洗通道和抽吸通道。根据本文档中讨论的各种实施方式,冲洗通道和抽吸通道可以各自例如在由控制器单元进行的自动控制下接收冲洗流体或抽吸压力,以在内窥镜手术期间执行不同的任务或实现不同的功能。
118.方法800包括操作诸如系统100或其变体(例如系统200、300a或300b中的一个)的疏通系统的一个或更多个过程。虽然方法800的过程绘制在一个流程图中,但其不需要以特定的顺序执行。在各种示例中,过程中的一些可以以与本文中所示的顺序相比不同的顺序来执行。
119.在810处,可以使用流量传感器来感测通过工作通道的流率,该流量传感器可以定位在医疗装置的工作通道内部。流量传感器的示例可以包括测量从热源产生的热的传递速率的热风速计、测量一系列位置上的压力下降的压差传感器、测量频移的多普勒效应或行程/飞行时间的超声波流量传感器、测量指示流率的流体电导变化的电磁传感器等。在820处,可以例如使用堵塞控制器161,基于感测到的流率来检测指示工作通道中存在堵塞或不存在堵塞的通道状态。在示例中,可以响应于流率减小例如低于第一流率阈值来检测通道堵塞。如果感测到的流率增加并超过第二流率阈值,则可以检测到不存在堵塞或阻塞的工作通道成功疏通。在示例中,第一流率阈值或第二流率阈值可以均相对于参考流率(例如,是其特定百分比),例如在未堵塞通道中测量的参考流率。
120.如果在830处感测到的流率指示工作通道中存在堵塞,则在840处启用冲洗/抽吸操作的疏通模式以疏通阻塞的工作通道。当在医疗装置中使用单独的冲洗通道和抽吸通道时,疏通模式包括将冲洗流体的流施加到抽吸通道,以及/或者将抽吸压力施加到冲洗通道。这与冲洗/抽吸操作的标准模式不同,在冲洗/抽吸操作的标准模式下,抽吸源向抽吸通道提供抽吸压力,并且冲洗源向冲洗通道提供冲洗流体的流。在示例中,在840处,疏通模式
可以包括在对阻塞通道进行冲洗与进行抽吸之间交替。如以上参照图4a所讨论的,堵塞控制器161可以可控制地启用抽吸源(例如,抽吸源120)以向阻塞的工作通道提供抽吸压力达指定的抽吸持续时间(如图4a的图块420中所示)。可替选地或另外地,堵塞控制器161可以启用冲洗源(例如,冲洗源140)以向阻塞的工作通道施加冲洗流体的流达指定的冲洗持续时间(如图4a的图块440中所示)。可以由用户调整抽吸压力、抽吸流率、冲洗流率或用于对冲洗流体加压的泵压力。
121.不同尺寸(因此不同质量)的堵塞颗粒可能对抽吸或冲刷冲洗流体的响应不同。如图4a所示,抽吸、冲洗或者在抽吸与冲洗之间交替可以有助于从堵塞块中移出较小颗粒并与堵塞物的其余部分分离,因为与较大颗粒相比,较小颗粒可以沿着抽吸流方向或流体流方向以更快的速度移动,并行进更长的距离。通过向工作通道施加额外的抽吸流或冲洗流,可以更容易和有效地将分离的颗粒沿工作通道提取出。在示例中,可以改变抽吸压力、抽吸流率、冲洗流率或泵压中的一个或更多个以按尺寸分离出颗粒。例如,可以应用较高的流率以移除较大颗粒,以及可以应用较低的流率以通过通道移除较小颗粒。
122.在疏通过程期间可以连续地或周期性地监测810流率。当在830处监测到的流率增加并超过阈值时,阻塞的通道被认为成功地疏通。然后可以将操作的疏通模式切换回冲洗/抽吸操作的标准模式。
123.图9是示出用于原位疏通医疗装置的工作通道,同时将解剖环境的压力(“环境压力”)保持在控制之下诸如将环境压力维持在基本上用户指定的压力水平的方法900的流程图。控制环境压力的过程可以在压力控制器诸如压力控制器162中实现并由其执行。不需要以特定顺序执行方法900的过程。例如,可以以与本文所示的顺序相比不同的顺序执行一些步骤。
124.方法900包括用于检测工作通道中的堵塞和疏通所述阻塞的通道的步骤910至940,其类似于方法800的步骤810至840。方法900还包括步骤950至980,以在存在或不存在通道阻塞的情况下调节手术(例如,内窥镜手术)期间的环境压力。如前所述,抽吸可能导致解剖部位处的负压力变化,而冲洗可能导致解剖部位处的正压力变化。负压力变化和正压力变化可能对暴露于解剖部位的内部器官造成不良影响。将环境压力维持在受控的压力水平可以增加患者安全性并有效缩短手术时间。
125.可以通过自动调整一个或更多个工作通道中的抽吸流率和/或冲洗流率来实现环境压力的调节。具体地,在950处,可以使用压力传感器来感测环境压力。压力传感器可以附接至或集成到医疗装置的远端部分,使得传感器与解剖环境接触。压力传感器的示例可以包括电阻式压力传感器、电容式压力传感器、压电式压力传感器、光学式压力传感器或微机电系统(mems)压力传感器。
126.在960处,可以将感测到的组织压力与例如由用户经由用户接口140提供的期望压力进行比较。期望压力表示在手术期间在解剖环境处要维持的压力。在一个示例中,期望压力基本上是净零压力。在另一示例中,期望压力是正压力。在又一示例中,期望压力是负压力。将受控的正压力维持在安全范围内可以有助于在内窥镜手术期间扩张解剖结构(例如,输尿管、肾脏或其他器官),以允许通过镜更好地观察解剖结构,而不会由于过大的正压力而造成组织损伤。正压力还可以防止组织碎片或结石碎屑卡在解剖结构中,并有助于将它们从解剖结构中移除。在一些情况下,在内窥镜手术期间将受控的负压力维持在安全范围
内也可以促进从解剖结构中提取碎片,而不会使内部器官处于过大的负压力的风险。
127.如果在960处感测到的压力没有达到基本上期望压力的水平(即,在容差范围内,例如期望压力的
±
5%至10%),则在970处可以例如使用压力控制器162来调整通过一个或更多个工作通道的冲洗流率或抽吸流率中的一个或更多个,以将环境压力向期望压力的水平驱动。在一些示例中,除了期望的压力水平之外或代替期望的压力水平,可以例如从用户接口140接收期望的流量状况。期望的流量状况包括关于流入(例如,施加到解剖环境的冲洗流体的流率)相对于流出(例如,施加到解剖环境的抽吸的流率)的信息,并且对应于要施加到解剖环境的期望压力。可以改变通过一个或更多个工作通道的冲洗流率或抽吸流率中的一个或更多个,以在手术期间维持期望的流量状况。
128.当在任何工作通道中检测到没有堵塞,或者已经成功地疏通阻塞的通道时,可以通过冲洗/抽吸操作的标准模式来执行970处的压力控制过程。如上面参照图5所描述的,施加到抽吸通道的抽吸可以产生解剖环境的负压力,这可以抵消由增加的冲洗流率产生的环境压力的增加。可以调节抽吸流率或抽吸压力,直到(例如由增加的冲洗引起的)感测到的压力的增加被抽吸流基本上中和,由此产生期望的基本上净零压力;或者直到感测到的环境压力达到基本上期望的正压力或期望的负压力的水平。类似地,提供给冲洗通道的冲洗流体的流可以产生解剖环境的正压力,这可以抵消由抽吸产生的环境压力的降低。可以调节冲洗流率,直到(例如由增加的抽吸引起的)感测到的压力的降低被冲洗流基本上中和,从而产生期望的基本上净零压力;或者直到感测的环境压力达到基本上期望的正压力或期望的负压力的水平。
129.当工作通道中的至少一个但不是全部被堵塞时,可以通过冲洗/抽吸操作的疏通模式来执行970处的压力控制过程。图6a示出了抽吸通道被堵塞而冲洗通道未被堵塞的示例。如其中所讨论的,冲洗流体的流可以被施加到抽吸通道以疏通阻塞的抽吸通道。这可以产生如可以由压力传感器检测到的环境压力的增加。抽吸压力可以被施加到冲洗通道,这可以产生负压力以抵消解剖环境处的压力增加。可以调节冲洗通道中的抽吸流率或抽吸压力,直到(由阻塞的抽吸通道中的增加的冲洗引起的)感测到的压力的增加被抽吸流基本上中和,由此产生期望的基本上净零压力;或者直到感测的环境压力达到基本上期望的正压力或期望的负压力的水平。
130.在冲洗通道被堵塞而抽吸通道未被堵塞的另一示例中,抽吸压力可以施加到冲洗通道以疏通阻塞的冲洗通道。这可以产生环境压力的降低。如上面参照图7a所讨论的,冲洗流体的流可以施加到抽吸通道,这可以产生正压力以抵消解剖环境处的负增加。可以调节冲洗流率,直到(由阻塞的冲洗通道中的增加的抽吸引起的)感测到的压力的降低被冲洗流基本上中和,由此产生期望的基本上净零压力;或者直到感测的环境压力达到基本上期望的正压力或期望的负压力的水平。
131.在980处,检查手术是否完成。如果手术未完成,则可以继续流率感测和疏通过程910至940以及压力控制过程950至980。
132.如方法800和900中所描述的,受控的冲洗和抽吸——包括在向同一堵塞通道施加冲洗流体和施加抽吸压力之间交替——可以通过使积聚以堵塞通道的不同尺寸的碎片分离来有效地疏通通道。如方法900中所描述的,通过在一个或更多个工作通道中施加冲洗和/或抽吸进行压力控制可以有效地避免在存在和不存在通道堵塞的情况下在内窥镜手术
期间施加在内部器官上的过大的正压力或负压力或者使在存在和不存在通道堵塞的情况下在内窥镜手术期间施加在内部器官上的过大的正压力或负压力最小化。因此,可以缩短总的手术时间并且可以提高患者安全性。
133.附加注释
134.以上详细描述包括对附图的参照,这些附图形成详细描述的一部分。附图通过图示的方式示出了具体实施方式,在所述具体实施方式中,可以实践本发明。这些实施方式在本文中也被称为“示例”。这样的示例可以包括除了示出的或描述的要素之外的要素。然而,本发明人还设想了仅提供所示出的或所描述的那些要素的示例。此外,本发明人还设想了使用关于本文中所示出的或所描述的特定示例(或其一个或更多个方面)或关于其他示例(或其一个或更多个方面)所示出或所描述的那些要素(或其一个或更多个方面)的任何组合或排列的示例。
135.在本文献中,如在专利文献中常见的那样,独立于“至少一个”或“一个或更多个”的任何其他实例或用法,使用术语“一(a)”或“一个(an)”来包括一个或多于一个。在本文献中,除非另外指出,否则术语“或”被用来指代非排他性的或,使得“a或b”包括“a而非b”、“b而非a”以及“a和b”。在本文献中,术语“包含(including)”和“其中(in which)”被用作相应术语“包括(comprising)”和“其中(wherein)”的简明中文等同物。另外,在所附权利要求中,术语“包含(including)”和“包括(comprising)”是开放式的,也就是说,包括除了权利要求中的这样的术语之后列出的那些要素之外的要素的系统、装置、物品、组合物、制剂或过程仍然被认为落在该权利要求的范围内。此外,在所附权利要求中,术语“第一”、“第二”和“第三”等仅被用作标记,并不意在对它们的对象施加数值要求。
136.上面的描述旨在是说明性的而非限制性的。例如,上面描述的示例(或其一个或更多个方面)可以彼此结合使用。在查看以上描述之后,例如本领域普通技术人员可以使用其他实施方式。提供摘要以符合37c.f.r.
§
1.72(b),以允许读者快速确定本技术公开内容的性质。应当理解的是,提交的摘要将不会被用来说明或限制权利要求的范围或含义。此外,在以上详细描述中,各种特征可以被结合在一起以组织本公开内容。这不应当被解释为旨在:对于任何权利要求,未要求保护的公开的特征均是必要的。而是,发明主题可能在于少于特定公开的实施方式的所有特征。因此,所附权利要求由此作为示例或实施方式被并入到具体实施方式中,其中,每项权利要求独立作为单独的实施方式,并且设想这样的实施方式可以以各种组合或排列彼此结合。本发明的范围应该参考所附权利要求连同这样的权利要求所赋予的等同物的全部范围来确定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。