1.本发明涉及刷树机的技术领域,具体地,涉及一种可自动检测判断的树木刷白机及其系统、树木涂白方法,尤其涉及一种可自动检测判断的螺旋升降树木刷白机及其系统、树木涂白方法。
背景技术:
2.树木涂白是指用涂白剂(主要成分是生石灰和硫磺)将树干部分涂成白色,具有防虫、防寒及美化环境的作用,是绿化植物养护管理的一项重要内容。现有的环抱式自适应刷树机是通过螺旋升降的方式实现一体式涂抹的效果,然而刷树机在工作触发和控制上目前采用的是开关控制,需要人工值守,亦无法保证涂刷高度的整齐统一。现有的刷树机利用三个半环滚刷架组成独立的环抱结构,实现了环抱树木的螺旋上升,扩大了接触面积,可以提高涂刷效率。由4个弹簧及对应喷淋口组成一个系统的单元臂连接三个单元臂组成的系统,可以更好适应不同树况。集动力、运动系统、储料盒、水泵等功能模块于一体,大大减小了体积。然而由于此树木刷白机仅能够由一个开关控制向上运动、向下运动与停止,需要使用者自己判断何时停止,依旧无法保证涂刷高度的整齐统一。所以在自动化设计上需要做出进一步改进。
3.在公开号为cn113751271a的专利文献中公开了一种可螺旋升降的环抱式自适应刷树机,包括滚刷架、滚刷桶、驱动系统以及水泵,多个滚刷架头尾相连成环形结构套设在树干上,滚刷架上开设有多个开孔;滚刷桶上开设有多个溢出刷料的溢料口,滚刷桶两端分别连接设置弯折管,两端的弯折管另一端连接设置后轴,后轴穿设过开孔设置;驱动系统包括减速电机、齿轮箱以及滚轮,齿轮箱一端上连接设置滚轮,齿轮箱另一端与减速电机驱动连接;水泵上连接设置输送管,输送管环绕滚刷架设置,后轴另一端连接至输送管;滚刷桶和驱动系统对应多个开孔分别设有多个,多个滚刷桶与多个驱动系统间隔设置,滚轮和滚刷桶对应树干设置。
4.针对上述中的相关技术,发明人认为刷树机在工作触发和控制上目前采用的是开关控制,需要人工值守,亦无法保证涂刷高度的整齐统一,且在涂刷过程中,涂料易堵在喷淋口处,造成堵塞。因此,需要提出一种新的技术方案以改善上述技术问题。
技术实现要素:
5.针对现有技术中的缺陷,本发明的目的是提供一种可自动检测判断的树木刷白机及其系统、树木涂白方法。
6.根据本发明提供的一种可自动检测判断的树木刷白机,包括滚刷架、滚刷桶、储料仓以及水泵;
7.所述滚刷架设有多个,多个所述滚刷架头尾相连成环形结构套设在树干上,所述滚刷架上开设有多个开孔;
8.所述滚刷桶上开设有多个溢出刷料的溢料口,且所述滚刷桶上设置有一层滚刷
布,所述滚刷桶两端分别连接设置弯折管,两端的所述弯折管另一端分别连接设置后轴,所述后轴穿设过所述开孔设置;
9.所述储料仓与滚刷桶连通设置,所述储料仓设置有带封盖的漏斗结构;
10.所述水泵上连接设置输送管,所述输送管环绕所述滚刷架设置,所述后轴另一端连接至输送管,所述水泵采用防腐蚀水泵。
11.本发明还提供一种可自动检测判断的树木刷白机系统,所述系统应用于上述中的可自动检测判断的树木刷白机,包括:多个减速电机、多个继电器、arduinonano开发板、蜂鸣器及多个超声波传感器;
12.多个所述减速电机互相连接,且正极连接有单刀双掷开关k2,负极连接有单刀双掷开关k3;多个所述继电器的一端接地,另一端与arduinonano开发板的引脚相连接;所述蜂鸣器与arduinonano开发板相连接;多个所述超声波传感器的第一引脚与蜂鸣器相连接,且多个所述超声波传感器的第四引脚接地,第二引脚和第三引脚与arduinonano开发板相连接;所述单刀双掷开关k3连接有直流电源的负极,所述直流电源的正极连接有单刀双掷开关k1。
13.优选地,所述arduinonano开发板的a0-a5端口与超声波传感器相连接;arduinonano开发板的d4-d7端口与继电器相连接。
14.优选地,所述直流电源采用12v聚合物锂电池。
15.本发明还提供一种树木涂白方法,其特征在于,所述方法应用上述中的可自动检测判断的树木刷白机系统,所述方法包括如下步骤:
16.步骤s1:将机器固定在任意高度,检测出当前高度xm;
17.步骤s2:机器向下运动至底部;
18.步骤s3:机器向上运动至1.2m处;
19.步骤s4:机器向下运行至xm处。
20.优选地,所述机器固定设置有继电器、减速电机、蜂鸣器和超声波传感器。
21.优选地,超声波传感器根据发射和接收超声波的时间差计算出发射点距障碍物的距离,实时输出当前高度,调整运动方向,进行智能化自动化涂刷。
22.优选地,所述超声波传感器的个数为三个。
23.优选地,所述继电器控制减速电机运行;所述继电器的个数为三个,两个继电器控制向上向下攀升,若输出高电频则减速电机做逆时针运动,即上升,若输出低电频则顺时针运动;第三个继电器控制电机总电源,即工作与停止。
24.优选地,当控制向上向下攀升的继电器接到单片机输出的低电平时,减速电机的一端与电源负极相连,另一端与电源正极相连,此时刷树机向下运动;若输出高电平时,电机的一端与电源正极相连,另一端与电源负极相连,刷树机向上运动;
25.多个所述减速电机被安装在一根能够伸缩的金属杆上,通过弹簧与机身连接,所述减速电机的个数为三个。
26.与现有技术相比,本发明具有如下的有益效果:
27.1、本发明在一体式可螺旋升降刷树机的基础上做出改进和优化,使用单片机、超声波传感器,进行程序编写,实现了树木的自动涂白,更加符合了实际情况,减轻了涂刷工人的工作强度;通过改造喷淋口,降低涂刷过程中的堵塞;
28.2、本发明通过超声波测距等传感器,能智能化完成一棵树的所有涂刷工作,实现了树木涂白的统一化,整齐化,保证操作时更加便捷化;
29.3、本发明通过对运输喷涂方式以及加料方式的改进,使用带有封盖的漏斗结构,用刷头与喷头相组合的方式,使用滚刷代替单纯的喷涂,使喷涂更加均匀、高效;
30.4、本发明通过加装单片机和超声波测距等传感器实时检测刷树机距地面高度从而实现自动升降,以此达到将机器随意固定在使用者舒适操作高度后都能自动节能地完成涂刷工作;
31.5、本发明采用扩大喷口孔径并采用刷头与喷头相组合的方式,使用滚刷代替单纯的喷涂,不仅有效解决了喷口堵塞和涂抹均匀度不高的问题,也使石灰水更加容易的保留在树干表面;
32.6、本发明采用带有封盖的漏斗结构,方便了喷涂液的及时添加。
附图说明
33.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
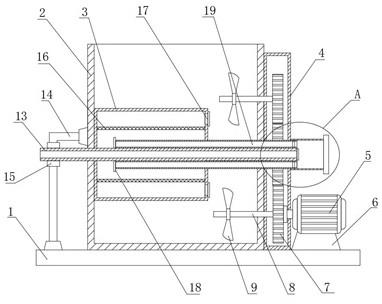
34.图1为本发明实施例的示意图;
35.图2为本发明主控结构封装外壳的三维建模图;
36.图3为本发明超声波原理图;
37.图4为本发明继电器与电机相连的电路图;
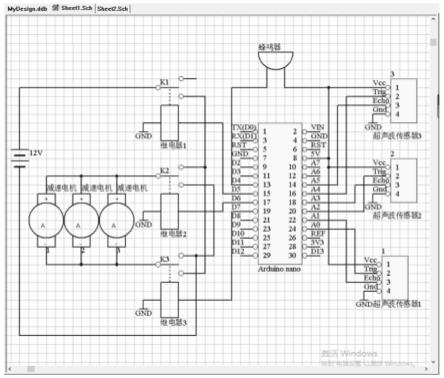
38.图5为本发明系统电路原理图;
39.图6为本发明爬升结构受力分析图;
40.图7为本发明螺旋上升原理图;
41.图8为本发明螺旋下降原理图;
42.图9为本发明刷树机三维图;
43.图10为本发明支脚三维图。
具体实施方式
44.下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
45.实施例1:
46.根据本发明提供的一种可自动检测判断的树木刷白机,包括滚刷架、滚刷桶、储料仓以及水泵;滚刷架设有多个,多个滚刷架头尾相连成环形结构套设在树干上,滚刷架上开设有多个开孔;滚刷桶上开设有多个溢出刷料的溢料口,且滚刷桶上设置有一层滚刷布,滚刷桶两端分别连接设置弯折管,两端的弯折管另一端分别连接设置后轴,后轴穿设过开孔设置;储料仓与滚刷桶连通设置,储料仓设置有带封盖的漏斗结构;水泵上连接设置输送管,输送管环绕滚刷架设置,后轴另一端连接至输送管,水泵采用防腐蚀水泵。
47.本发明还提供一种可自动检测判断的树木刷白机系统,系统应用于上述中的可自
动检测判断的树木刷白机,包括:多个减速电机、多个继电器、arduinonano开发板、蜂鸣器及多个超声波传感器;多个减速电机互相连接,且正极连接有单刀双掷开关k2,负极连接有单刀双掷开关k3;多个继电器的一端接地,另一端与arduinonano开发板的引脚相连接;蜂鸣器与arduinonano开发板相连接;多个超声波传感器的第一引脚与蜂鸣器相连接,且多个超声波传感器的第四引脚接地,第二引脚和第三引脚与arduinonano开发板相连接;单刀双掷开关k3连接有直流电源的负极,直流电源的正极连接有单刀双掷开关k1。
48.arduinonano开发板的a0-a5端口与超声波传感器相连接;arduinonano开发板的d4-d7端口与继电器相连接;直流电源采用12v聚合物锂电池。
49.本发明还提供一种树木涂白方法,其特征在于,方法应用上述中的可自动检测判断的树木刷白机系统,方法包括如下步骤:
50.步骤s1:将机器固定在任意高度,检测出当前高度xm;
51.步骤s2:机器向下运动至底部;
52.步骤s3:机器向上运动至1.2m处;
53.步骤s4:机器向下运行至xm处。
54.机器固定设置有继电器、减速电机、蜂鸣器和超声波传感器;超声波传感器根据发射和接收超声波的时间差计算出发射点距障碍物的距离,实时输出当前高度,调整运动方向,进行智能化自动化涂刷;超声波传感器的个数为三个;继电器控制减速电机运行;继电器的个数为三个,两个继电器控制向上向下攀升,若输出高电频则减速电机做逆时针运动,即上升,若输出低电频则顺时针运动;第三个继电器控制电机总电源,即工作与停止;当控制向上向下攀升的继电器接到单片机输出的低电平时,减速电机的一端与电源负极相连,另一端与电源正极相连,此时刷树机向下运动;若输出高电平时,电机的一端与电源正极相连,另一端与电源负极相连,刷树机向上运动;多个减速电机被安装在一根能够伸缩的金属杆上,通过弹簧与机身连接,减速电机的个数为三个。
55.实施例2:
56.实施例2为实施例1的优选例,以更为具体地对本发明进行说明。
57.本发明提供一种刷树机及树木涂白方法,在工人将机器固定在树干上后,根据使用者输入的高度,自动完成工作,并在喷涂结束后发出信号提醒工人;包括如下步骤:
58.第一步:将机器随意固定在手部操作的舒适高度后,检测出当前高度xm。
59.第二步:向下运动至底部。
60.第三步:向上运动至1.2m。
61.第四步:向下运行至xm处。
62.优点:符合人的手部舒适操作高度(约0.8m),同时在保证两次涂刷的基础上又能减少攀升路径,节约能源。
63.模型搭建:
64.材料数量arduinonano开发板1us016超声波传感器3srd-05vdc-sl-c继电器2jdc-3ff-s-z继电器1
65.使用3d打印技术,将单片机、继电器等固定在机架上。
66.高度测定模块:使用超声波测距传感器,根据发射和接收超声波的时间差计算出发射点距障碍物的距离,实时输出当前高度,从而调整运动方向,实现智能化自动化涂刷。
67.l=340t/2
68.在这里使用的是三个超声波传感器配合使用,共同判断,减小误差。
69.电机的控制及配合:由于攀爬用的三个电机正常工作所需电压远高于超声波传感器,所以使用了三个继电器控制电机运行。
70.两个继电器负责控制向上向下攀升,若输出高电频则电机做逆时针运动,即上升,若输出低电频则顺时针运动;第三个继电器负责控制电机总电源,即工作与停止。
71.向上爬升:
72.digitalwrite(6,high);
73.digitalwrite(5,high);
74.digitalwrite(4,high);
75.向下爬升:
76.digitalwrite(6,high);
77.digitalwrite(5,low);
78.digitalwrite(4,low);
79.停止:
80.digitalwrite(6,low);
81.delay(1000);
82.当两个继电器接到单片机输出的低电平时(继电器的com口与nc常闭端相连),电机的一端与电源负极相连,另一端与电源正极相连,此时刷树机向下运动;若输出高电平(继电器的com口与n0常开端相连)时,电机的一端(上端)与电源正极相连,另一端(下端)与电源负极相连,刷树机向上运动。
83.在确定了所需要的arduino开发平台与硬件后,将各个部件相连组成完整电路,如图5。
84.arduino nano的a0-a5端口控制三个超声波传感器;d4-d7端口控制三个继电器,从而实现对电机的控制。采用12v聚合物锂电池供电。
85.螺旋爬升结构的优化:首先对结构进行受力分析。采用螺旋爬升的目的不是为了省电,因为螺旋爬升虽然对电机的功率要求有所降低,但是,电机运行的路程更长,所用的时间也更多,所以小功率电机所消耗的电能并没有降低。本项目采用螺旋爬升的主要目的是为了提高刷树效率。如果机器像电梯一样上下运行的话,那么一把刷子只能在树杆上刷出一条白线,6把刷子最多也只能刷出6根白线,石灰水不能全面覆盖整个树杆。原因是刷子与刷子之间肯定会有空隙,这些空隙就会在树杆上留下一条条空白区(即树杆没有刷到石灰水)。相反,如果采用螺旋爬升,并且上、下刷两遍,这样就能保证机器上不同的刷子经过的路径能互相交叉、补充和覆盖,从而实现把整个树杆都刷白的目的。
86.刷树机平稳上升或下降要满足两个条件:(1)三个电机所产生的牵引力大小要基本相同。在本项目中,使用了三个相同参数的减速直流电机(12v 200pwm),并且并联在同一个电路中,所以能保证三个电机产生的牵引力基本相同;(2)三个电机的安装位置与水平面
的夹角要保持一致。在本项目中,三个电机与水平面的夹角都为30度,这样就能保证三个电机产生的牵引力处在同一个方向上,使刷树机的四周生成一个均衡向上或向下的力,从而驱动刷树机平稳地向上或向下螺旋爬升。
87.在本项目中,为了让刷树机能牢牢地抓住树杆,三个电机分别被安装在一根可以伸缩的金属杆上,通过弹簧与机身连接在一起,在弹簧的作用下,电机上的轮子与树杆之间就能产生一个较大的压力,从而增加了摩擦力,使机器能紧紧地抓住树枝。弹簧的主要功能实现自动伸缩,虽然也有部分固定电机角度的作用,但是,机器在运行过程中会受到各种不同力的影响,弹簧会发生形变,从而改变了三个电机与水平面的夹角大小。当三个电机的倾角大小不同时,不同方向的力会互相抵消,电机的内耗就会增加,同时机器也会发生倾斜,严重时可能会卡死在树杆上,所以,机器在运行过程中,保持三个电机的倾角大小基本相同是关键。但是,由于各种各样的原因(如压力和摩擦系数不同等),两个轮子的摩擦力肯定不会相等(一个轮子也一样,轮子两边的摩擦力也不会始终相同),从而导致牵引力f1和f2大小不同。当f1》f2时,轮子会顺时针旋转;当f1《f2时,轮子会逆时针旋转,不管是顺时针,还是逆时针,都会导致三个电机与水平面的夹角不一致的问题。
88.为了解决以上问题,在电机伸缩杆的末端加装了一块正方体,正方体与伸缩杆固定在一起,同时,这个正方体刚好卡在滑槽中,这样,既能保证电机能正常伸缩,同时,三个电机的方向始终能固定下来,不会因为伸缩而改变与水平面之间夹角的大小,从而保证了机器能平稳地上、下螺旋爬行。
89.喷涂方式以及加料方式的改进:喷涂液的主要成分为硫磺与石灰乳。氢氧化钙的溶解度比较低,加之水泵工作时一定会放出热量,使其在水中的溶解度更低。石灰水容易堵塞在喷头小口处,导致出料不顺畅,喷涂不够均匀。抓住了原装置的自适应设计(电机及喷桶能与树干紧密地贴合),进行创新式的改进优化。在原喷涂结构的基础上覆盖一层薄滚刷布,使用滚刷代替单纯的喷涂,可以减少飞溅,节约涂料,使工作更加均匀、高效。本刷树机通过小型防腐蚀水泵为滚刷桶供料。为了保持机器平衡,本树木刷白机使用的涂料仓的体积为550ml。针对涂料仓体积较小,需要频繁更换的问题,本树木刷白机使用了带有封盖的漏斗结构,并通过实验调整储料仓大小,实现每完成两棵树的涂刷任务添加一次涂料。
90.测试与分析:对超声波传感器进行测试
[0091][0092][0093]
通过大量的数据分析,发现超声波传感器输出的数据与此时的真实高度基本呈正
比例的线性关系,通过传感器的输出值可以直接换算出当前高度。
[0094]
超声波传感器的精度还是比较高的,但是发现,当传感器与障碍物的距离较小时,因为超声波传感器的光斑较大,输出的数据会产生较大误差,对程序运行产生一定影响。
[0095]
首先便是对程序进行一定地修改。将机器下降时的停止高度调高至15cm,可以在出现大误差前就停止。
[0096][0097]
除此之外,通过加装支撑脚,使刷树机能稳定地静止在地面上,保证刷树机能够及时调整运动方向,避免刷树机一直向下运动。
[0098]
本领域技术人员可以将本实施例理解为实施例1、实施例2的更为具体的说明。
[0099]
本领域技术人员知道,除了以纯计算机可读程序代码方式实现本发明提供的系统及其各个装置、模块、单元以外,完全可以通过将方法步骤进行逻辑编程来使得本发明提供的系统及其各个装置、模块、单元以逻辑门、开关、专用集成电路、可编程逻辑控制器以及嵌入式微控制器等的形式来实现相同功能。所以,本发明提供的系统及其各项装置、模块、单元可以被认为是一种硬件部件,而对其内包括的用于实现各种功能的装置、模块、单元也可以视为硬件部件内的结构;也可以将用于实现各种功能的装置、模块、单元视为既可以是实现方法的软件模块又可以是硬件部件内的结构。
[0100]
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。