1.本技术涉及物料转运技术领域,尤其涉及一种物料转运装置。
背景技术:
2.在装配生产线上,往往需要对物料在两个线体之间进行转运。例如铝箔翅片和铜管装配生产过程中。装配过程中需要人工在翅片冲压滚筒线体与铜管预装线体区域之间转运,人工将铝箔翅片从滚筒线体工艺板上取下放在木托叉板上,用液压手动叉车转运至铜管装配滚筒线,再从木托叉板上搬上铜管装配滚筒线工艺板上完成装配,转运过程中人员的劳动强度较大,人工成本较高。
技术实现要素:
3.本技术的目的在于提供一种物料转运装置,该物料转运装置可代替人工完成物料在两线体之间进行转运,节省人工,实现减员增效。
4.为此,本技术实施例提供了一种物料转运装置,设置于两条线体之间;所述物料转运装置包括:转运车体;以及物料输送机构,设置于所述转运车体上,且所述物料输送机构包括支架组件、可转动设置于所述支架组件上的滚筒以及驱动所述滚筒转动的驱动组件。
5.在一种可能的实现方式中,所述物料输送机构还包括设置于所述支架组件上的阻挡器,所述阻挡器设置于所述滚筒的输出端,用于控制所述驱动组件。
6.在一种可能的实现方式中,所述物料输送机构还包括设置于所述支架组件上的物料检测传感器,所述物料检测传感器与所述驱动组件电连接。
7.在一种可能的实现方式中,所述支架组件包括:底部框架;以及两个防护板,相对设置于所述底部框架的顶部;其中,所述滚筒可转动设置于两个所述防护板之间,所述驱动组件设置于所述底部框架上。
8.在一种可能的实现方式中,所述转运车体包括:壳体,具有空腔;行走机构,设置于所述壳体的底部,且所述行走机构包括驱动轮以及用于驱动所述驱动轮的驱动电机;控制单元,设置于所述壳体的所述空腔内,用于控制所述行走机构和物料输送机构。
9.在一种可能的实现方式中,所述行走机构还包括:磁条,设置于两条所述线体之间;磁导航传感器,设置于所述壳体上,用于检测所述磁条的磁信号;站点地标卡,设置于两条所述线体对接工位;以及地标传感器,设置于所述壳体上,用于检测所述站点地标卡。
10.在一种可能的实现方式中,所述行走机构还包括减震组件,所述减震组件包括:安装壳,用于承载所述驱动轮和所述驱动电机;导向套,沿竖直方向设置于所述壳体内;导向轴,贯穿所述导向套,且导向轴的底端与所述安装壳连接;以及减震弹簧,套设于所述导向轴的外周侧,且减震弹簧的两端分别与导向套和安装壳抵接。
11.在一种可能的实现方式中,所述驱动轮设置有两个,分别设置于所述安装壳的两侧;所述行走机构还包括设置于所述壳体底部的四个辅助减震轮,所述辅助减震轮包括:固定架,可转动设置于所述壳体的底部;连接架,所述连接架的一端与所述固定架可转动连
接;万向轮,可转动设置于所述连接架远离所述固定架的一端;以及支撑弹簧,设置于所述连接架与所述固定架之间,且所述支撑弹簧的两端分别与所述固定架和所述连接架抵接。
12.在一种可能的实现方式中,所述物料转运装置还包括设置于壳体外侧的人机控制屏,所述人机控制屏与所述控制单元电连接。
13.在一种可能的实现方式中,所述壳体沿行进方向的两侧设置有障碍物传感器,所述障碍物传感器与所述控制单元电连接。
14.根据本技术实施例提供的物料转运装置,该物料转运装置需要对物料进行转运时,将转运车体移动到需要提供物料的线体输出端,并将滚筒与线体输出端对接,使得线体上的物料输送到滚筒上,通过转运车体移动到另一线体的输入端,并与线体的输入端对接,通过滚筒将物料输送到线体上,可代替人工完成物料在两线体之间进行转运,节省人工,实现减员增效。
附图说明
15.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。另外,在附图中,相同的部件使用相同的附图标记,且附图并未按照实际的比例绘制。
16.图1示出本技术实施例提供的一种物料转运装置的立体结构示意图;
17.图2示出本技术实施例提供的一种物料转运装置的正视结构示意图;
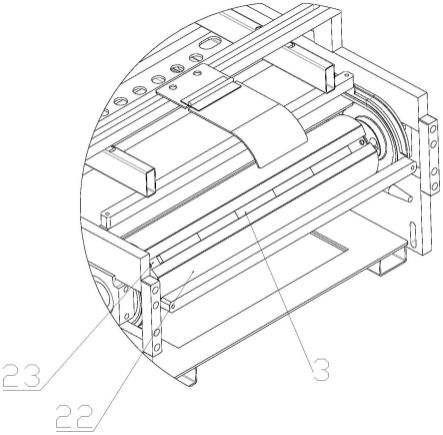
18.图3示出本技术实施例提供的一种物料转运装置的侧视结构示意图;
19.图4示出本技术实施例提供的一种物料转运装置壳体剖开后的立体结构示意图;
20.图5示出图4另一角度的立体结构示意图。
21.附图标记说明:
22.1、转运车体;11、壳体;12、行走机构;121、驱动轮;122、驱动电机;123、磁导航传感器;124、地标传感器;125、减震组件;1251、安装壳;1252、导向套;1253、导向轴;1254、减震弹簧;126、辅助减震轮;1261、固定架;1262、连接架;1263、万向轮;1264、支撑弹簧;13、控制单元;14、电源模块;15、人机控制屏;16、障碍物传感器;17、安全触边;18、状态灯;
23.2、物料输送机构;21、支架组件;211、底部框架;212、防护板;22、滚筒;23、驱动组件;24、阻挡器;25、物料检测传感器。
具体实施方式
24.为使本技术实施例的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本技术的一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本技术保护的范围。
25.相关技术中,铝箔翅片和铜管装配生产过程中。装配过程中需要人工在翅片冲压滚筒线体与铜管预装线体区域之间转运,人工将铝箔翅片从滚筒线体工艺板上取下放在木托叉板上,用液压手动叉车转运至铜管装配滚筒线,再从木托叉板上搬上铜管装配滚筒线
工艺板上完成装配,转运过程中人员的劳动强度较大,人工成本较高。
26.图1示出本技术实施例提供的一种物料转运装置的立体结构示意图;图2示出本技术实施例提供的一种物料转运装置的正视结构示意图;图3示出本技术实施例提供的一种物料转运装置的侧视结构示意图;图4示出本技术实施例提供的一种物料转运装置壳体剖开后的立体结构示意图;图5示出图4另一角度的立体结构示意图。
27.如图1至图5所示,本技术实施例提供一种物料转运装置,设置于两条线体之间;物料转运装置包括:转运车体1和物料输送机构2,其中:
28.物料输送机构2设置于转运车体1上,且物料输送机构2包括支架组件21、可转动设置于支架组件21上的滚筒22以及驱动滚筒22转动的驱动组件23。
29.本技术中,需要对物料进行转运时,将转运车体1移动到需要提供物料的线体输出端,并将滚筒22与线体输出端对接,使得线体上的物料输送到滚筒22上,通过转运车体1移动到另一线体的输入端,并与线体的输入端对接,通过滚筒22将物料输送到线体上,可代替人工完成物料在两线体之间进行转运,节省人工,实现减员增效。
30.具体的,滚筒22设置有多个,多个滚筒22在水平面内排列设置,用于物料的输送以及临时存放,在转运过程中对物料进行支撑。
31.本技术一个具体实施例中,通过转运车体1移动翅片冲压滚筒22线体处,铝箔翅片输送到滚筒22上,然后转运车体1移动到铜管装配滚筒22线体处,通过滚筒22对铝箔进行输送,使得铝箔输送到铜管装配线体上完成装配,可以代替人工对铝箔翅片的转运,从而实现节省人工。
32.其中,驱动组件23为滚筒电机,滚筒电机带动滚筒22顺时针转动,用于将物料输送到滚筒22上,滚筒电机带动滚筒22逆时针转动,用于将滚筒22上的物料输送回线体上。
33.如图1-3所示,在一些实施例中,物料输送机构2还包括设置于支架组件21上的阻挡器24,阻挡器24设置于滚筒22的输出端,用于控制驱动组件23。
34.本技术中,物料在滚筒22上输送时,触碰到阻挡器24,通过阻挡器24控制驱动组件23,使得滚筒22停止输送,使得物料铺放在滚筒22上,保证物料在转运过程中的稳定性。
35.具体的,阻挡器24为触发器以及铰接设置于触发器顶部的铰接架,铰接架的一端设置有触碰轮用于接收物料的触碰,另一端设置有触发部用于触发触发器,触发器控制驱动组件23。
36.可选的,阻挡器24还可以为其它形式的压力传感器、触碰传感器等。
37.如图2-3所示,在一些实施例中,物料输送机构2还包括设置于支架组件21上的物料检测传感器25,物料检测传感器25与驱动组件23电连接。
38.本技术中,通过物料检测传感器25用于检测输送到滚筒22上的物料,当检测到物料时控制驱动组件23启动,驱动组件23带动滚筒22转动,从而使得物料由线体输送到滚筒22上。
39.在一些实施例中,支架组件21包括:底部框架211和两个防护板212,其中:
40.两个防护板212相对设置于底部框架211的顶部。
41.滚筒22可转动设置于两个防护板212之间,驱动组件23设置于底部框架211上。
42.本技术中,滚筒22可转动设置于两个防护板212之间,防止物料伸出至滚筒22的外部,物料检测传感器25和阻挡器24分别设置于底部框架211上,用于共同控制驱动组件23。
43.具体的,两个防护板212之间的间距与线体上工艺板宽度,并且滚筒22的高度与线体上滚筒22的高度相等,方便转运车体1与生产线体有效对接。
44.如图3所示,在一些实施例中,转运车体1包括:壳体11和行走机构12,其中:
45.壳体11具有空腔。空腔内设置有电源模块14,用于为用电机构提供电能。
46.行走机构12设置于壳体11的底部,且行走机构12包括驱动轮121以及用于带动驱动轮121的驱动电机122。
47.控制单元13设置于壳体11的空腔内,用于控制行走机构12和物料输送机构2。
48.本技术中,通过驱动电机122带动驱动轮121转动,实现转运车体1的移动,具体的,驱动轮121设置有两个,通过驱动电机122带动两个驱动轮121差速前进,实现驱动车体的前进和转向,控制单元13控制行走机构12和物料输送机构2按设定程序进行。
49.在一些实施例中,行走机构12还包括:磁条(未示出)、磁导航传感器123、站点地标卡(未示出)和地标传感器124,其中:
50.磁条设置于两条线体之间,具体的,磁条铺设在两条线体之间的地面上。
51.磁导航传感器123设置于壳体11上,用于检测磁条的磁信号。
52.站点地标卡,设置于两条线体对接工位。
53.地标传感器124,设置于壳体11上,用于检测站点地标卡。
54.本技术中,磁导航传感器123用于检测磁条的磁信号,然后通过控制单元13控制驱动电机122带动驱动轮121做差速前进,与磁条的方向保持一致,实现轨迹巡航,同时通过地标传感器124与站点地标卡配合,控制转运车体1的启停及巡航方向,通过物料检测传感器25控制驱动组件23运转,同时与生产线体运行方形保持一致,即将物料输送到滚筒22上时滚筒22沿顺时针方向转动,将物料送出滚筒22时滚筒22沿逆时针方向转动。
55.如图4所示,在一些实施例中,行走机构12还包括减震组件125,减震组件125包括:安装壳1251、导向套1252、导向轴1253和减震弹簧1254,其中:
56.安装壳1251用于承载驱动轮121和驱动电机122。
57.导向套1252沿竖直方向设置于壳体11内。
58.导向轴1253贯穿导向套1252,且导向轴1253的底端与安装壳1251连接。
59.减震弹簧1254套设于导向轴1253的外周侧,且减震弹簧1254的两端分别与导向套1252和安装壳1251抵接。
60.本技术中,安装壳1251可沿竖直方向滑动,通过减震弹簧1254实现减震的效果,使得转运车体1可以有效应相对复杂的地面情况。
61.在一些实施例中,驱动轮121设置有两个,分别设置于安装壳1251的两侧;
62.如图5所示,行走机构12还包括设置于壳体11底部的四个辅助减震轮126,辅助减震轮126包括:固定架1261、连接架1262、万向轮1263和支撑弹簧1264,其中:
63.固定架1261可转动设置于壳体11的底部。
64.连接架1262的一端与固定架1261可转动连接。
65.万向轮1263可转动设置于连接架1262远离固定架1261的一端。
66.支撑弹簧1264设置于连接架1262与固定架1261之间,且支撑弹簧1264的两端分别与固定架1261和连接架1262抵接。
67.具体的,辅助减震轮126设置有四个,分别设置于壳体11底部的四个端角处,通过
支撑弹簧1264对连接架1262和固定架1261进行弹性支撑,使得转运车体1能在允许的坡度范围内正常行进并左右转弯,提高使用可靠性。
68.在一些实施例中,物料转运装置还包括设置于壳体11外侧的人机控制屏15,人机控制屏15与控制单元13电连接。
69.本技术中,通过人机控制屏15设定控制单元13的一些程序。
70.在一些实施例中,壳体11沿行进方向的两侧设置有障碍物传感器16,障碍物传感器16与控制单元13电连接。
71.本技术中,通过障碍物传感器16可以在行进的过程中检测前方的障碍物,并将信息传递给控制单元13,使得控制单元13控制行走机构12暂停或者选择其他路线绕过障碍物。
72.本技术中,壳体11沿行进方向的两侧均设置有安全触边17,在与线体进行对接时使得安全触边17与线体接触,提高安全性。
73.本技术中,壳体11上还设置有状态灯18,用于显示转运车体1的当前状态。
74.该物料转运装置需要对物料进行转运时,将转运车体1移动到需要提供物料的线体输出端,并将滚筒22与线体输出端对接,使得线体上的物料输送到滚筒22上,通过转运车体1移动到另一线体的输入端,并与线体的输入端对接,通过滚筒22将物料输送到线体上,可代替人工完成物料在两线体之间进行转运,节省人工,实现减员增效。
75.应当指出,在说明书中提到的“一个实施例”、“实施例”、“示例性实施例”、“一些实施例”等表示所述的实施例可以包括特定特征、结构或特性,但未必每个实施例都包括该特定特征、结构或特性。此外,这样的短语未必是指同一实施例。此外,在结合实施例描述特定特征、结构或特性时,结合明确或未明确描述的其他实施例实现这样的特征、结构或特性处于本领域技术人员的知识范围之内。
76.应当容易地理解,应当按照最宽的方式解释本公开中的“在
……
上”、“在
……
以上”和“在
……
之上”,以使得“在
……
上”不仅意味着“直接处于某物上”,还包括“在某物上”且其间具有中间特征或层的含义,并且“在
……
以上”或者“在
……
之上”不仅包括“在某物以上”或“之上”的含义,还可以包括“在某物以上”或“之上”且其间没有中间特征或层(即,直接处于某物上)的含义。
77.此外,文中为了便于说明可以使用空间相对术语,例如,“下面”、“以下”、“下方”、“以上”、“上方”等,以描述一个元件或特征相对于其他元件或特征的如图所示的关系。空间相对术语意在包含除了附图所示的取向之外的处于使用或操作中的器件的不同取向。装置可以具有其他取向(旋转90度或者处于其他取向上),并且文中使用的空间相对描述词可以同样被相应地解释。
78.需要说明的是,在本文中,诸如“第一”和“第二”等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
79.最后应说明的是:以上各实施例仅用以说明本技术的技术方案,而非对其限制;尽管参照前述各实施例对本技术进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本技术各实施例技术方案的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。