1.本实用新型涉及装修用的器具技术领域,尤其涉及一种墙面粉刷机器人。
背景技术:
2.目前,墙面粉刷工作都是依靠人工完成,工作人员拿着滚刷蘸满油漆之后,举着滚刷在墙面上涂刷,在对一些较高的墙面粉刷时,需要借助脚手架,工作人员站在上面对墙面进行粉刷。
3.但是采用上述方式,工作人员站在脚手架上对墙面粉刷,比较危险,容易发生高空跌落事故。
技术实现要素:
4.本实用新型的目的在于提供一种墙面粉刷机器人,可以从低到高的对墙面粉刷,避免人工粉刷发生事故。
5.为实现上述目的,本实用新型提供了一种墙面粉刷机器人,包括底座和粉刷组件;
6.所述粉刷组件包括多个电动轮、滑动座、螺杆、驱动机构、两个第一支杆、两个舵机、两个第二支杆和两个滚刷;多个所述电动轮分别设置在所述底座侧边,所述滑动座与所述底座滑动连接,并位于所述底座内侧,所述螺杆与所述底座转动连接,并与所述滑动座螺纹连接,且穿过所述滑动座,所述驱动机构设置在所述底座上,两个所述第一支杆分别与所述滑动座固定连接,并分别位于所述滑动座侧边,两个所述舵机分别与两个所述第一支杆连接,并分别位于两个所述第一支杆一侧,两个所述第二支杆分别与两个所述舵机的输出端连接,并分别位于两个所述舵机一侧,两个所述滚刷分别与两个所述第二支杆固定连接,并分别位于两个所述第二支杆一侧。
7.其中,所述粉刷组件还包括两个导向杆,两个所述导向杆分别与所述底座固定连接,并分别与所述滑动座滑动连接,且分别穿过所述滑动座。
8.其中,所述驱动机构包括安装架、电机、转轴、主动齿轮和从动齿轮,所述安装架与所述底座固定连接,并位于所述底座一侧,所述电机与所述安装架固定连接,并位于所述安装架内侧,所述转轴与所述电机的输出轴固定连接,并与所述底座转动连接,且位于所述安装架内侧,所述主动齿轮与所述转轴固定连接,并被所述转轴贯穿,所述从动齿轮与所述螺杆固定连接,并与所述主动齿轮啮合。
9.其中,所述滚刷包括支架和滚筒,所述支架与所述第二支杆固定连接,并位于所述第二支杆一侧,所述滚筒与所述支架转动连接,并位于所述支架内侧。
10.其中,所述墙面粉刷机器人还包括放置组件,所述放置组件设置在所述底座侧边。
11.其中,所述放置组件包括放置盒、挡块和转杆,所述放置盒与所述底座固定连接,并位于所述底座侧边,所述挡块与所述放置盒固定连接,并位于所述放置盒侧边,所述转杆与所述放置盒转动连接,并位于所述放置盒侧边。
12.其中,所述放置组件还包括锁紧螺柱,所述锁紧螺柱与所述挡块螺纹连接,并穿过
所述挡块。
13.本实用新型的一种墙面粉刷机器人,多个所述电动轮用于带动所述底座移动,所述驱动机构用于驱动所述螺杆转动,所述螺杆转动驱动所述滑动座在所述底座内侧上下滑动,两个所述第一支杆对称设置在所述滑动座侧边,用于安装两个所述舵机,每一个所述舵机的输出端都通过所述第二支杆安装了一个所述滚刷,所述舵机可以驱动所述第二支杆,带动所述滚刷左右刷动,因此两个所述滚刷可以同时向外侧展开或者向内侧收缩,未使用时,两个所述第二支杆与墙面垂直,两个所述滚刷逐渐向外展开刷动或者逐渐向内侧收缩刷动时,两个所述第二支杆会逐渐倾斜,此时多个所述电动轮带动所述底座逐渐向墙壁靠拢,两个所述滚刷才会一直贴在墙面刷动,当所述第二支杆由倾斜逐渐回到垂直的过程中,多个所述电动轮带动所述底座逐渐远离所述墙壁,由于所述螺杆可以调节所述滑动座的高度位置,以调节两个所述滚刷的高度位置,从而可以从低到高的对墙面粉刷,避免人工粉刷发生事故。
附图说明
14.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍。
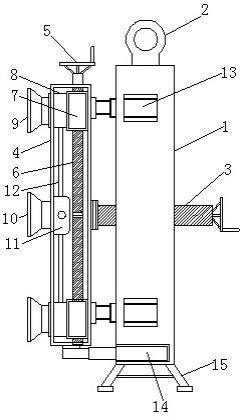
15.图1是本实用新型第一实施例的整体的结构示意图。
16.图2是本实用新型第一实施例的整体的另一角度的结构示意图。
17.图3是本实用新型第二实施例的整体的结构示意图。
18.图4是图3细节a的局部放大图。
19.101-底座、102-粉刷组件、103-电动轮、104-滑动座、105-螺杆、106-驱动机构、107-第一支杆、108-舵机、109-第二支杆、110-滚刷、111-导向杆、112-安装架、113-电机、114-转轴、115-主动齿轮、116-从动齿轮、117-支架、118-滚筒、201-放置组件、202-放置盒、203-挡块、204-转杆、205-锁紧螺柱。
具体实施方式
20.本技术第一实施例为:
21.请参阅图1-图2,其中,图1是本实用新型第一实施例的整体的结构示意图,图2是本实用新型第一实施例的整体的另一角度的结构示意图。本实用新型提供一种墙面粉刷机器人:包括底座101和粉刷组件102;所述粉刷组件102包括多个电动轮103、滑动座104、螺杆105、驱动机构106、两个第一支杆107、两个舵机108、两个第二支杆109、两个滚刷110和两个导向杆111;所述驱动机构106包括安装架112、电机113、转轴114、主动齿轮115和从动齿轮116;所述滚刷110包括支架117和滚筒118。
22.针对本具体实施方式,所述底座101用于安装所述粉刷组件102,所述底座101的高度较高。
23.其中,多个所述电动轮103分别设置在所述底座101侧边,所述滑动座104与所述底座101滑动连接,并位于所述底座101内侧,所述螺杆105与所述底座101转动连接,并与所述滑动座104螺纹连接,且穿过所述滑动座104,所述驱动机构106设置在所述底座101上,两个所述第一支杆107分别与所述滑动座104固定连接,并分别位于所述滑动座104侧边,两个所
述舵机108分别与两个所述第一支杆107连接,并分别位于两个所述第一支杆107一侧,两个所述第二支杆109分别与两个所述舵机108的输出端连接,并分别位于两个所述舵机108一侧,两个所述滚刷110分别与两个所述第二支杆109固定连接,并分别位于两个所述第二支杆109一侧。多个所述电动轮103用于带动所述底座101移动,所述驱动机构106用于驱动所述螺杆105转动,所述螺杆105转动驱动所述滑动座104在所述底座101内侧上下滑动,两个所述第一支杆107对称设置在所述滑动座104侧边,用于安装两个所述舵机108,每一个所述舵机108的输出端都通过所述第二支杆109安装了一个所述滚刷110,所述舵机108可以驱动所述第二支杆109,带动所述滚刷110左右刷动,因此两个所述滚刷110可以同时向外侧展开或者向内侧收缩,未使用时,两个所述第二支杆109与墙面垂直,两个所述滚刷110蘸满油漆与墙壁接触,两个所述滚刷110逐渐向外展开刷动或者逐渐向内侧收缩刷动时,两个所述第二支杆109会逐渐倾斜,此时多个所述电动轮103带动所述底座101逐渐向墙壁靠拢,两个所述滚刷110才会一直贴在墙面刷动,当所述第二支杆109由倾斜逐渐回到垂直的过程中,多个所述电动轮103带动所述底座101逐渐远离所述墙壁,多个所述电动轮103、所述驱动机构106和所述舵机108均由控制器控制,由于所述螺杆105可以调节所述滑动座104的高度位置,以调节两个所述滚刷110的高度位置,从而可以从低到高的对墙面粉刷,避免人工粉刷发生事故。
24.其次,两个所述导向杆111分别与所述底座101固定连接,并分别与所述滑动座104滑动连接,且分别穿过所述滑动座104。两个所述导向杆111进一步给所述滑动座104导向,使得所述滑动座104可以稳定上下滑动。
25.同时,所述安装架112与所述底座101固定连接,并位于所述底座101一侧,所述电机113与所述安装架112固定连接,并位于所述安装架112内侧,所述转轴114与所述电机113的输出轴固定连接,并与所述底座101转动连接,且位于所述安装架112内侧,所述主动齿轮115与所述转轴114固定连接,并被所述转轴114贯穿,所述从动齿轮116与所述螺杆105固定连接,并与所述主动齿轮115啮合。所述安装架112用于安装所述电机113,所述电机113驱动所述转轴114转动,从而带动所述主动齿轮115转动,所述主动齿轮115转动驱动啮合的所述从动齿轮116转动,最后带动所述螺杆105转动。
26.另外,所述支架117与所述第二支杆109固定连接,并位于所述第二支杆109一侧,所述滚筒118与所述支架117转动连接,并位于所述支架117内侧。所述支架117安装在所述第二支杆109的一端,用于转动安装所述滚筒118,所述滚筒118用于蘸油漆,然后贴着墙壁转动,将油漆刷在墙壁上。
27.本实施例所述的一种墙面粉刷机器人,使用时,向两个所述滚筒118上蘸满油漆,多个所述电动轮103带动所述底座101向墙壁靠近,使得两个所述滚筒118抵在墙壁上,两个所述第二支杆109与墙壁垂直,然后启动两个所述舵机108,带动两个所述第二支杆109朝着相反方向转动展开,两个所述第二支杆109逐渐倾斜,同步的,多个所述电动轮103带动所述底座101逐渐靠近墙壁,使得两个所述滚筒118始终与墙壁接触,最终带动两个所述滚筒118逐渐向外侧滚动,对墙面进行粉刷,向外展开到极限位置之后,两个所述舵机108带动两个所述第二支杆109同时向内侧转动,两个所述第二支杆109逐渐由倾斜变为垂直,逐渐复位,同步的多个所述电动轮103带动所述底座101逐渐远离墙壁,当两个所述第二支杆109复位之后,两个所述舵机108继续带动两个所述第二支杆109同时向内侧转动,两个所述第二支
杆109逐渐倾斜,同步的,多个所述电动轮103带动所述底座101逐渐靠近墙壁,使得两个所述滚筒118始终与墙壁接触,最终带动两个所述滚筒118逐渐向内侧滚动,对墙面进行粉刷,当前高度的墙壁粉刷完成之后,启动所述电机113,驱动所述转轴114转动,从而带动所述主动齿轮115转动,所述主动齿轮115转动驱动啮合的所述从动齿轮116转动,最后带动所述螺杆105转动,所述螺杆105带动所述滑动座104上滑,带动两个所述滚筒118上移,然后采用上述方式,对另一高度的墙壁进行粉刷,从而可以慢慢从低到高的对墙壁进行粉刷。
28.本技术第二实施例为:
29.在第一实施例的基础上,请参阅图3-图4,其中,图3是本实用新型第二实施例的整体的结构示意图,图4是图3细节a的局部放大图。本实用新型提供的一种墙面粉刷机器人还包括放置组件201;所述放置组件201包括放置盒202、挡块203、转杆204和锁紧螺柱205。
30.针对本具体实施方式,所述放置组件201设置在所述底座101侧边。所述放置组件201用于放置油漆桶,方便使用。
31.其中,所述放置盒202与所述底座101固定连接,并位于所述底座101侧边,所述挡块203与所述放置盒202固定连接,并位于所述放置盒202侧边,所述转杆204与所述放置盒202转动连接,并位于所述放置盒202侧边。所述转杆204的一端与所述放置盒202转动连接,另一端可以放进所述挡块203内侧,所述放置盒202具有一个放置槽,用于放置油漆桶,将油漆桶放进所述放置盒202之后,转动所述转杆204,将所述转杆204的一端放进所述挡块203内侧,使得所述转杆204横放在所述放置盒202侧边,挡住油漆桶。
32.其次,所述锁紧螺柱205与所述挡块203螺纹连接,并穿过所述挡块203。所述锁紧螺柱205用于拧动之后,抵紧所述转杆204,使得所述转杆204不会轻易的脱离所述挡块203。
33.本实施例所述的一种墙面粉刷机器人,放置油漆桶时,将油漆桶放进所述放置盒202内,然后转动所述转杆204,将所述转杆204的一端放进所述挡块203内侧,并拧动所述锁紧螺柱205,抵紧所述转杆204,使得所述转杆204横放在所述放置盒202侧边,挡住油漆桶,需要取出油漆桶时,松开所述锁紧螺柱205,转动所述转杆204,不再挡住油漆桶即可。
34.以上所揭露的仅为本技术一种或多种较佳实施例而已,不能以此来限定本技术之权利范围,本领域普通技术人员可以理解实现上述实施例的全部或部分流程,并依本技术权利要求所作的等同变化,仍属于本技术所涵盖的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。