1.该项发明专利设计属于箱式物流水平传输系统的设计技术,具体而言,涉及箱式物流水平传输结构中的摆渡车在系统轨道运行中改变轨道的一个装置的结构与控制运行的方法。
背景技术:
2.箱式物流水平传输路径采用轨道结构后,轨道传输的路径的改变需通过轨道换向器来实现,现有的轨道系统的变轨器全部采用轨道移动方式,8端口位的变轨器体积过于笨重,路径转换过慢,制造成本和故障率都不低,施工安装不方便,将现有轨道系统变轨器的移动轨直线移动方式改用旋转机构变角换向,轨道与轨道的中心距离在箱式物流水平轨道系统中达到430毫米间距,现有移动轨从一个端口到就近的另一个端口位置的直线移动方式都需要接近4秒钟时间,本发明将直线移动方式改用旋转机构变角实现轨道端口位置的改变,有利于设备体积变小,重量减轻,提高轨道换向响应速度,在确保定位准确要求下降低故障率,有利于系统传输的高效和稳定。
技术实现要素:
3.本技术的主要目的在于提供一种箱式物流水平轨道传输系统中的轨道换向器结构与及运行控制方法,以解决现有结构带来的投资成本高,运行效率过低的问题。
4.为了实现上述目的,本技术提供了以下技术方案:
5.一款双旋转轨换轨器,其特征为,固定在中心轴上的旋转体由中心轴、旋转板和轨道组成,所述的旋转体中心轴固定在旋转板的中心孔中,旋转板设计在壳体承重板的滚珠轮上方,壳体承重板一周固定在壳体群边的最下方,壳体群边的最上方一周通过螺栓固定在壳体安装板外圆,所述的中心轴的旋转板上固定一同步轮,中心轴上下一周设计有平面轴承,中心轴下端间隔安装二段轨道,换轨器设计有驱动器和检测装置。
6.所述的旋转体中的旋转板与中心轴通过处理成为同一结构体,中心轴长度上出壳体安装板,下出壳体承重板,安装在旋转板上的同步轮中心孔大于中心轴直径,同步轮通过安装螺栓固定在旋转板上方的平面。
7.所述的壳体群边为一正圆形外壳体,换轨器的外壳为方形,壳体群边下方与壳体承重板通过处理成为同一结构体,上方一周采用可拆卸结构固定在壳体安装板外圆。
8.段轨道的中心距大于一个摆渡车的宽度,轨道两头呈外弧圆形,轨道一头为基点,中心轴上端对应基点方向固定一挡片,挡片随轨道旋转。
9.所述的中心轴上下一周设计的平面轴承是旋转体的中心定位机构,上方轴承分布在壳体安装板下方,下方轴承分布在壳体承重板上方,平面轴承为包胶带轴结构,安装孔设计有调节位置。
10.所述轨道换轨器的轨道最大对接端口数为八个,其中1#轨道29a对接四个,2#轨道29b对接四个,90度一端口分布在轨道一周,轨道的基点端只在4个端口往返旋转,最大旋转
角度控制在270度区域中。
11.所述换轨器上的轨道旋转时其轨道基点端停在1#端口时,1#端口和5#端口被连通;轨道基点端停在2#端口时,2#端口和6#端口被连通;轨道基点端停在3#端口时,3#端口和7#端口被连通;轨道基点端停在4#端口时,4#端口和8#端口被连通。
12.所述换轨器二个轨道上设计的检测装置安装在轨道轨道安装板上两边的摆渡车同一运行方向,一个为磁传感器和一个扫码器,检测摆渡车的id号和上下轨道的信息。
13.所述的轨道基点对应的1#端口位置上安装的检测装置为一对射型红外传感器272,红外传感器安装在壳体安装板靠旋转轴的位置,轨道驱动轴边上安装有检测堵转的接近开关,驱动轴一周安装有触发接近开关的金属触点。
14.所述的换轨器驱动器为一步进电机,步进电机固定在壳体安装板上,步进电机驱动轴上安装有驱动轮,驱动轮与安装在旋转板上的同步轮在一个水平位置上,驱动轮直径小于同步轮直径4倍以上。
15.本发明的意义在于:
16.现有的轨道变轨器的轨道与轨道的中心距如在箱式物流水平轨道系统中达到430毫米间距,现有移动轨从一个端口到就近的另一个端口位置的直线移动需要接近4秒钟时间,将现有轨道系统变轨器的移动轨直线移动方式改用旋转机构变角换向,其最大优势:设备体积变小,重量减轻,摆渡车换轨响应速度变快,定位准确,故障率低,有利于箱式物流系统的大面积的推广和应用。
附图说明
17.为了更清楚的说明本实用新型的实施例和技术方案,结合附图阐述对本装置具体实施例中的技术方案进行清楚、完整的描述,所述的实施例仅仅是本发明的一部分,并不是全部的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的其他的实施例都属于本实用新型的保护范围。
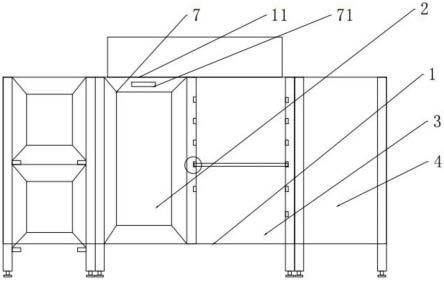
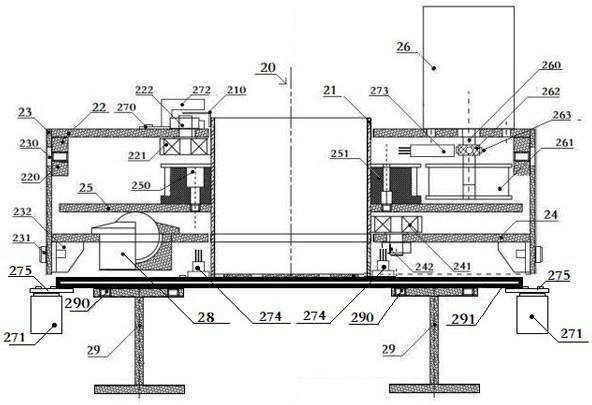
18.图1为本实用新型剖面结构示意图。
19.图2为本实用新型平面俯视结构示意图。
20.图3为本实用新型轨道端口号分布示意图。
21.图4为本实用新型实施例说明示意图。
22.图5为本实用新型实施例说明示意图。
23.如图2和图3所示,图中标号分别为:21、中心轴;210、基点挡片;22、壳体安装板;221、上轴承;222、上轴承螺杆;23、壳体群边;230、群边安装孔;231、吊装螺栓;232、t形结构焊块;24、壳体承重板;241、下轴承;242、下轴承螺杆;25、旋转板;250、安装螺栓;251、同步轮;252、加强焊块;26、步进电机;260、电机轴;261、驱动轮;262、触点盘;263、金属触点;264、驱动带;27、检测装置;270、装置安装板;271、扫码器;272、红外传感器;273、接近开关;274、磁传感器;28、滾珠轮;29、轨道;29a、1#轨道;29b、2#轨道;290、轨道安装位;291、轨道安装板;292、路轨安装板;293、轨道安装孔;299、基点端;30、摆渡车。
具体实施方式
24.为了更清楚的说明本实用新型的实施例和现有设备的技术解决方案,结合附图阐
述对本发明具体实施例中的技术方案进行清楚、完整的描述,有利于对该技术的了解,需要说明的是,术语“安装”、“设置”、“设有”、“连接”、“相连”、“定位”应做广义理解,例如,可以是固定连接,可拆卸连接,或整体式构造;可以是直接相连,或者是通过中间媒介间接相连,又或者是两个装置、元件或组成部分之间内部的连通。对于本领域普通技术人员而言,可以根据具体情况理解上述术语在本技术中的具体含义。
25.下面将参考附图并结合实施例来详细说明本技术:
26.如图1所示,旋转板25与中心轴21通过中心轴21一周上方设计的三角形结构焊块252焊为同一结构体,结构焊块252设计在同步轮251内圈。
27.中心轴21长度上出壳体安装板22,下出壳体承重板24,安装在旋转板25上的同步轮251中心孔大于中心轴21直径,同步轮251通过安装螺栓250固定在旋转板25上方的平面,同步轮251为pvc材质。
28.轨道换向器20中的旋转体由中心轴21和旋转板25及1#轨道29a、2#轨道29b组成,利用旋转体自重自由摆放在壳体承重板24的滚珠轮28上,通过上下分布的平面轴承将旋转体中心轴21定位,滚珠轮28利用自重设计在壳体承重板24的定位孔中。
29.壳体群边23为一正圆形外壳体,是轨道换轨器20的外壳,壳体群边23下方与壳体承重板24通过t形结构焊块232焊为同一结构体,换轨器20的外边方外壳体上设计有吊装螺栓231做为设备安装用,在壳体群边23一周上方焊装有弧形焊块220,通过壳体群边23上的安装孔230使用螺栓可拆卸结构固定在壳体安装板22外圆。
30.中心轴21上下一周设计的平面轴承是旋转体的中心定位机构,上方轴承221分布在壳体安装板22下方,下方轴承241分布在壳体承重板24上方,平面轴承为包胶带轴结构,安装孔设计有调节位置。
31.二个轨道1#轨道29a、2#轨道29b按摆渡车宽度要求间隔固定在旋转体中心轴21最下方的轨道安装板291上,轨道29两头呈外弧圆形,轨道29一头为基点端299,中心轴21上端对应基点端299方向固定一基点挡片210,基点挡片210随轨道29旋转。
32.轨道换向器20的轨道29最大对接端口数为八个,1#轨道29a、2#轨道29b都可对接八个端口,90度一端口分布在轨道一周,轨道29的基点端299只在4个端口往返旋转,最大旋转角度控制在270度区域中。
33.轨道换向器20的轨道29的基点端299停在1#端口时,1#端口和5#端口被连通;轨道基点端299停在2#端口时,2#端口和6#端口被连通;轨道基点端299停在3#端口时,3#端口和7#端口被连通;轨道基点端299停在4#端口时,4#端口和8#端口被连通,轨道基点端299到达4#端口后不再向5#端口后面旋转。
34.轨道换向器轨道上设计的检测装置27包括扫码器271、对射型红外传感器272、防堵转接近开关273和磁传感器274。安装在轨道29的轨道安装板291扫码器安装板275上的一个为磁传感器274和一个扫码器271,红外传感器272安装在轨道29基点端299对应的1#端口位置上的壳体安装板23靠中心轴21的位置,检测堵转的接近开关273安装在轨道29驱动轴260边的壳体安装板23上,驱动轴260对应接近开关273位置安装有触发接近开关的金属触点盘262,触点盘262一周嵌装有4个金属触点263,驱动轴260旋转一周时接近开关273会被触发4次。
35.驱动轮264与同步轮251比大于4倍,驱动轮264旋转一圈时,同步轮251只转了不到
4分之一圈,轨道29从一个端口旋转到另一个端口的角度为45度,步进电机26驱动轴260只需旋转半圈,接近开关273会被触发二次。
36.如图1、图3所示的示意图结构进行实施例传输过程的控制说明:
37.案例1,两辆摆渡车30在5#端口排队,第一辆经轨道1#轨道29a去2#端口,第二辆经1#轨道29a去1#端口出轨道换轨器;
38.见图4、图5,并参见图1:第一辆摆渡车30-1从5#端口路轨道90上换轨器20的1#轨道29a上,1#轨道29a上扫码器271读到摆渡车ⅰd号,磁传感器274检测到装车上轨道信息后,步进电机26启动,驱动轮261通过驱动带驱动同步轮251旋转,1#轨道29a基点299顺时针旋转90度,从1#端口向2#端口旋转,1#轨道29a基点到达2#端口停,摆渡车30从2#端口驶出换轨器20,摆渡车30下1#轨道29a的信息通过磁传感器274返给控制电路,轨道29立即反时针旋转从2#端口回到1#端口停,此时第二辆摆渡车30-2启动上轨道不停车直接向1#端口出换轨器20,如果换轨器20的7#端口有摆渡车30经过,换轨器20的双轨道可同时接转两股路轨道90上的摆渡车30通过;
39.案例2,摆渡车从轨道换向器20的5#端口转到6#端口返回。
40.见图2、图3,摆渡车从5#端口上换轨器20的1#轨道29a上,扫码器271读到摆渡车ⅰd号,磁传感器274检测到摆渡车上轨道29信息后摆渡车停,步进电机26启动,驱动轮261通过驱动带驱动同步轮251旋转,轨道29基点顺时针从1#端口向3#端口旋转,轨道1#轨道29a基点299顺时针旋转180度,轨道基点到达3#端口停,1#轨道29a接通3#端口,摆渡车30从3#端口(仍是车头朝前)驶出换轨器。
41.本发明将直线移动方式改用旋转机构变角实现轨道端口位置的改变,其最大优势:设备体积变小,重量减轻,摆渡车换轨响应速度变快,定位准确,故障率低,有利于箱式物流系统的大面积的推广和应用。
42.以上所述仅为本技术的优选实施例而已并不用于限制本技术,对于本领域的技术人员来说,本技术可以有各种更改和变化,凡在本技术的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。