1.本发明涉及仿生机器鱼及其浮力调节方法,尤其涉及一种蝠鲼式仿生鱼及其浮力调节方法。
背景技术:
2.海洋蕴藏着丰富的矿物资源、海洋生物资源和能源,海洋资源的开发对人类可持续发展具有重要意义。作为开发海洋资源的重要工具,水下机器人的研究在国内外一直受到广泛关注。传统的水下机器人技术,多采用一个至数个螺旋桨推进器作为驱动,其存在结构复杂、体积大、对环境扰动大、噪声大、推进效率低以及灵活性差的缺点。
3.为了解决该问题,业界不断发明各式各样的仿生机器鱼。例如,中国发明cn202110329523.0公开了一种基于液态电介质驱动器的仿蝠鲼水下软体机器人,包括一体式柔性机身外壳、内部躯干框架、左侧胸鳍驱动模块、右侧胸鳍驱动模块、电路模块和尾鳍驱动模块;一体式柔性机身外壳包裹于内部躯干框架和各模块外,作为整个软体机器人的外壳。中国实用新型cn202122942994.7公开了一种框架式仿蝠鲼潜航器,其包括潜航器主体、两个仿生胸鳍、胸鳍驱动组件、尾鳍和舵机;潜航器主体包括框架、设置于框架内的耐压舱,以及用于模仿蝠鲼躯体外形的浮力层,浮力层敷设于框架外。中国发明cn201710447123.3公开了一种仿箱鲀科自主机器鱼,采用吸排水的方法实现机器鱼潜浮运动。但上述发明有以下不足:当鱼体内部出现故障需要拆开时,第一个发明需要破坏掉一体式柔性机身外壳,而第二个发明则需要破坏掉浮力层,存在不易拆装的问题;第三个发明虽加入了吸排水的方法实现机器鱼潜浮运动,但该机构占据了仿生鱼基体部件内大部分空间,降低了基体部件内部空间利用率,加上控制系统电子元器件,进一步增大仿生机器鱼的体积。
技术实现要素:
4.发明目的:本发明旨在提供一种易拆装和减小浮力调节结构占用空间的蝠鲼式仿生鱼;本发明还提供一种蝠鲼式仿生鱼的浮力调节方法。
5.技术方案:本发明所述的蝠鲼式仿生鱼,包括基体部件和胸鳍,所述胸鳍通过体积可变的过渡部件对称设置在基体部件两侧,过渡部件为过渡板和柔性蒙皮组成的密闭空腔结构,空腔内充有油液并设有控制胸鳍运动的驱动机构;所述基体部件的中间隔板上安装有控制系统和浮力调节机构,浮力调节机构通过控制过渡部件内的油量,改变过渡部件中柔性蒙皮的体积,进而改变仿生鱼所受的浮力。
6.进一步地,所述驱动机构包括阶梯轴垫片、控制胸鳍摇翼的第一舵机、控制胸鳍拍翼的第二舵机、舵机连接架和u型支架,第一舵机的舵盘通过阶梯轴垫片与胸鳍连接,第二舵机的舵盘端安装在过渡板的一对支架上,第二舵机的舵盘与支架的安装孔同轴线设置。
7.进一步地,所述浮力调节机构包括蠕动泵、常闭电磁阀、体积可变的油囊、蠕动泵控制板、流量传感器和连接上述部件的油管组件,形成控制过渡部件和油囊间油液传输的
通路。
8.进一步地,所述控制系统部件包括固定在中间隔板上的微型电脑、舵机拓展板、lora模块、gps模块、电池和固定在基体部件上的摄像头、三合一天线、深度计。
9.进一步地,所述胸鳍为光敏树脂材料经3d打印制成,胸鳍截面为naca标准翼型截面。
10.进一步地,所述基体部件的蝠鲼式壳体的截面为类翼型截面。
11.进一步地,所述过渡板为类翼型截面,边缘设有一圈凸台,边缘向外延伸形成安装板,所述支架位于过渡板中心,过渡板的板面还设有排气孔、舵机过线孔和泵油孔。
12.进一步地,所述柔性蒙皮的顶部为与阶梯轴垫片配合的圆筒形,底部为与过渡板凸台配合的翼型截面形。
13.上述蝠鲼式仿生鱼的浮力调节方法,如下:
14.预设蝠鲼式仿生鱼的初始状态为悬浮状态,过渡部件内油量为x,胸鳍位于水平位置,仿生鱼的浮力等于重力;
15.预设两个垂直距离h1和h2,且h2>h1;当初始位置到目标位置垂直距离小于h1时,定义为短距离下潜或上浮;当初始位置到目标位置垂直距离大于h1时,定义为长距离下潜或上浮,蠕动泵泵油量设为k;当下潜至水底或上浮至水面时,蠕动泵泵油量设为m,m>k;当蝠鲼式仿生鱼与目标位置垂直距离为h2时,定义为接近目标位置。
16.识别指令任务,所述指令任务分为下潜和上浮;
17.判断目标位置距离,所述目标位置距离分为短距离,长距离、水底和水面;
18.当指令任务为短距离下潜时,胸鳍转动至俯翼位置后,仿生鱼进行摇拍翼运动,下潜至目标位置;
19.当指令任务为长距离下潜时,过渡部件减少油量至油量为x-k,同时胸鳍转动至俯翼位置后,进行摇拍翼运动;到达接近目标位置时,过渡部件增加油量至油量为x,同时胸鳍停止运动并复位至水平位置,此时仿生鱼浮力等于重力,仿生鱼受水阻力的作用,速度逐渐减小至0,仿生鱼恢复悬浮状态,最后仿生鱼通过摇拍翼运动到达目标位置;
20.当指令任务为下潜至水底时,过渡部件减少油量至油量为x-m,m>k,同时胸鳍转动至俯翼位置后,仿生鱼进行摇拍翼运动,直至下潜至水底;
21.当指令任务为短距离上浮时,胸鳍转动至仰翼位置后,仿生鱼进行摇拍翼运动,上浮至目标位置;
22.当指令任务为长距离上浮时,过渡部件增加油量至油量为x k,同时胸鳍转动至仰翼位置后,进行摇拍翼运动;到达接近目标位置时,过渡部件减少油量至油量为x,同时胸鳍停止运动并复位至水平位置,此时仿生鱼浮力等于重力,仿生鱼受水阻力的作用,速度逐渐减小至0,仿生鱼恢复悬浮状态,最后仿生鱼通过摇拍翼运动到达目标位置;
23.当指令任务为上浮至水面时,过渡部件增加油量至油量为x m,m>k,同时胸鳍转动至仰翼位置后,仿生鱼进行摇拍翼运动,直至上浮至水面。
24.有益效果:本发明与现有技术相比,其显著优点是:1、胸鳍与基体部件之间设有过渡部件,使得在不破坏蒙皮的情况下,可以对鱼体进行多次拆装;2、控制系统部件、浮力调节机构预先安装在中间隔板上,再将中间隔板插入基体部件内,方便基体的安装;3、本发明将浮力调节机构和过渡部件结合起来,通过泵油改变过渡部件体积,进而改变仿生鱼所受
浮力大小,解决了浮力调节结构空间占用过大的问题,使仿生鱼结构更加紧凑,同时使仿生鱼结构更加简单;4、本发明利用过渡部件将胸鳍驱动机构进行密封,防止舵机进水损坏,同时向过渡部件内注入油液,该操作可以排空其内部空气且不妨碍舵机正常运动。
附图说明
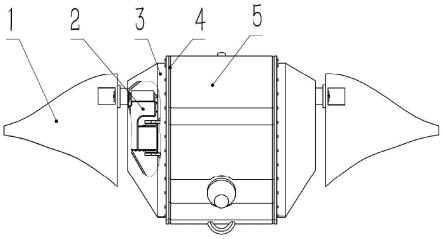
25.图1为本发明的结构示意图;
26.图2为胸鳍的结构示意图;
27.图3为驱动机构的结构示意图;
28.图4-图6为过渡部件的结构示意图;
29.图7为密封垫的结构示意图;
30.图8为基体部件的结构示意图;
31.图9为蝠鲼式壳体的结构示意图;
32.图10为中间隔板的结构示意图;
33.图11-图12为控制系统的结构示意图;
34.图13为浮力调节机构的结构示意图;
35.图14为胸鳍位置的示意图;
36.图15为接收指令的流程图;
37.图16为执行下潜指令时的流程图;
38.图17为执行上浮指令时的流程图。
具体实施方式
39.下面结合附图对本发明作进一步说明。
40.如图1所示,本发明所述蝠鲼式仿生鱼,包括基体部件5和胸鳍1,胸鳍1通过体积可变的过渡部件3对称设置在基体部件5两侧,过渡部件3为过渡板31和柔性蒙皮32组成的密闭空腔结构,空腔内设有控制胸鳍1运动的驱动机构2;所述基体部件5的中间隔板52上安装有控制系统53和浮力调节机构54,浮力调节机构54通过控制过渡部件3内的油量,改变过渡部件3中柔性蒙皮32的体积,进而改变仿生鱼所受的浮力;过渡部件3与基体部件5之间还设有密封垫4。
41.如图2所示,胸鳍1为光敏树脂材料经3d打印制成,胸鳍截面为naca标准翼型截面,胸鳍1靠近鳍根处开有方孔,方孔侧壁开有中心通孔,在中心通孔的四周均布有4个稍小的通孔。
42.如图3所示,驱动机构2包括阶梯轴垫片21、控制胸鳍1摇翼的第一舵机22、舵机连接架23、控制胸鳍1拍翼的第二舵机24和u型支架25,第一舵机22的舵盘通过阶梯轴垫片21与胸鳍1连接,第二舵机24的舵盘端通过螺钉固定在过渡板31中心位置的一对支架34上,第二舵机24的舵盘与支架34的安装孔同轴线设置。
43.阶梯轴垫片21由两段轴径不同的圆柱组成,且轴向开有中心通孔,在中心通孔的四周均布有4个稍小的通孔,阶梯轴垫片21轴径大的一端与胸鳍1鳍根贴合,另一端与第一舵机22贴合,螺钉穿过胸鳍1方孔侧壁的中心通孔、阶梯轴垫片21的中心通孔,与第一舵机22连接;螺钉穿过胸鳍1方孔侧壁上稍小的通孔、阶梯轴垫片21上稍小的通孔,与第一舵机
22的舵盘连接;舵机连接架23为l形,第一舵机22通过螺钉连接在舵机连接架23的短臂上,第二舵机24通过螺钉和u型支架25安装在舵机连接架23长臂上。
44.如图4所示,过渡板31为光敏树脂材料经3d打印制成,过渡板31主体由类翼型截面拉伸而成,边缘向外延伸形成安装板,安装板上开有一圈螺钉孔,边缘处打印有一圈凸台,过渡板31中心处的一对支架34,支架顶部开有一中心安装孔,在安装孔的四周均布有4个稍小的通孔,用于第二舵机24舵盘的安装。过渡板31的板面还开有排气孔、舵机过线孔以及泵油孔;舵机线穿过舵机过线孔后,用硅胶胶水将该孔进行密封;泵油孔处安装有管接头,连接处采用硅胶胶水防水密封。
45.如图5所示,柔性蒙皮32是由硅胶倒入模具中,凝固后脱模制成,柔性蒙皮32主体部分由翼型截面放样而来,顶部为圆筒形,柔性蒙皮32顶部内圆柱面与阶梯轴垫片21圆柱面配合,柔性蒙皮32底部内表面与过渡板31凸台外表面配合,配合处采用硅胶胶水防水密封。
46.如图6所示,橡胶塞33为硅胶材质,由轴径不同的两段圆柱组成,轴径较小的圆柱面与过渡板31的排气孔配合,配合处采用硅胶胶水防水密封。
47.如图7所示,密封垫4为硅胶材质,整体为类翼型环状结构且开有一圈通孔。
48.如图8所示,基体部件5包括蝠鲼式壳体51和中间隔板52,中间隔板52上设有控制系统53和浮力调节机构54。
49.如图9所示,所述蝠鲼式壳体51为中空筒状结构,截面为类翼型截面,内部开有插槽,蝠鲼式壳体51两侧端面各开有一圈盲孔,盲孔内装有螺套,通过螺钉穿过过渡板31、密封垫4,与蝠鲼式壳体51盲孔内的螺套相连。
50.如图10所示,所述中间隔板52为矩形,两端各切去一个半圆区域,板面上设有通孔,用于固定控制系统53和浮力调节机构54,中间隔板52插在蝠鲼式壳体51内部所开的插槽处。
51.如图11和图12所示,所述控制系统53包括lora模块531、gps模块532、树莓派微型电脑533、舵机拓展板534、电池535、摄像头536、三合一天线537、深度计538等控制系统部件,所述树莓派微型电脑533、舵机拓展板534、lora模块531、gps模块532、电池535固定在中间隔板上,所述摄像头536、三合一天线537、深度计538固定在蝠鲼式壳体51外侧。
52.如图13所示,浮力调节机构54包括蠕动泵541、常闭电磁阀542、油囊543、控制蠕动泵步进电机的蠕动泵控制板544、油管组件545、流量传感器546;油囊543为柔性材料制成,体积可变,蠕动泵541、常闭电磁阀542、油囊543和蠕动泵控制板544均固定在中间隔板52上。油管组件545包括第一油管5451、第二油管5452、第三油管5453、第四油管5454、三通管头5455、第五油管5456、第六油管5457;第一油管5451连接油囊543与蠕动泵541,第二油管5452连接蠕动泵541与常闭电磁阀542,第三油管5453连接常闭电磁阀542与流量传感器546,第四油管5454连接流量传感器546与三通管头5455,三通管头5455通过第五油管5456和第六油管5457与左右两个过渡板31上安装的管接头连接。
53.上述蝠鲼式仿生鱼的浮力调节方法,如下:
54.预设蝠鲼式仿生鱼初始状态为在水中悬浮状态,此时过渡部件内油量为x,胸鳍位于水平位置,仿生鱼的浮力等于重力;我们将仿生鱼所处的初始深度命名为a,将目标深度命名为b;当下潜/上浮距离小于h1时,我们称之为短距离下潜/上浮;当下潜/上浮距离大于
h1时,我们称之为长距离下潜/上浮;长距离下潜/上浮,蠕动泵泵油量为k;下潜至水底/上浮至水面,蠕动泵541泵油量为m(m>k);当与目标深度相距h2(h2>h1)时,我们称之为接近目标深度;当与目标深度相距h1时,我们称之为非常接近目标深度。
55.如图15所示,控制系统部件53接收指令,识别指令任务,判断接收的指令是下潜还是上浮。
56.如图16所示,当接收的指令是下潜时,进一步判断目标位置,判断是短距离下潜、长距离下潜还是下潜至水底。
57.当指令任务为短距离下潜时:
58.第一舵机22控制胸鳍1由水平位置转动角度α2到俯翼位置即位置1,如图14所示。然后第一舵机22和第二舵机24控制胸鳍1的摇拍翼运动,下潜至目标深度。此处将胸鳍1绕第一舵机22输出轴转动定义为摇翼,绕第二舵机24输出轴转动定义为拍翼,提高仿生鱼下潜效率。
59.当指令任务为长距离下潜时:
60.浮力调节机构54中常闭电磁阀542通电,同时蠕动泵控制板544控制蠕动泵541工作,从过渡部件3内泵油到油囊543,过渡部件3体积逐渐减小,此时浮力小于重力,仿生鱼从初始深度a开始下潜。同时,浮力调节机构54工作,第一舵机22控制胸鳍1由水平位置转动角度α2到俯翼位置。紧接着,第一舵机22和第二舵机24控制胸鳍1的摇拍翼运动。当泵油量达到k时,常闭电磁阀542断电,蠕动泵541停止泵油,此时过渡部件3内油量为x-k,保持该油量继续下潜,直至接近目标深度b。当接近目标深度b时,常闭电磁阀542通电,蠕动泵541工作,从油囊543泵油到过渡部件3内,过渡部件3体积逐渐增大,浮力逐渐增大,仿生鱼下潜速度减慢,当泵油量达到k时,停止泵油,此时过渡部件3内油量为x并保持该油量。与此同时,驱动机构2停止动作,胸鳍1复位至水平。仿生鱼浮力等于重力,仿生鱼受水阻力的作用,速度逐渐减小至0,仿生鱼重新悬浮在水中。此时,仿生鱼已非常接近目标深度b,接着仿生鱼通过摇拍翼运动到达目标深度b。
61.当指令任务为下潜至水底时:
62.浮力调节机构54中常闭电磁阀542通电,同时蠕动泵控制板544控制蠕动泵541工作,从过渡部件3内泵油到油囊543,过渡部件3体积逐渐减小,此时浮力小于重力,仿生鱼从初始深度a开始下潜;浮力调节机构54动作的同时,第一舵机22控制胸鳍1由水平位置转动角度α2到俯翼位置。紧接着,第一舵机22和第二舵机24控制胸鳍1的摇拍翼运动。当泵油量达到m时,常闭电磁阀542断电,蠕动泵541停止泵油,此时过渡部件3内油量为x-m,保持该油量,继续下潜至水底。
63.如图17所示,当接收的指令是上浮时,进一步判断是短距离上浮、长距离上浮还是上浮至水面。
64.当指令任务为短距离上浮时:
65.第一舵机22控制胸鳍1初始位置由水平位置转动角度α1到仰翼位置即位置2,如图14所示。然后,仿生鱼进行摇拍翼运动,上浮至目标深度。
66.当指令任务为长距离上浮时:
67.浮力调节机构54中常闭电磁阀542通电,同时蠕动泵控制板544控制蠕动泵541工作,从油囊543内泵油到过渡部件3,过渡部件3体积逐渐增大,此时浮力大于重力,仿生鱼从
初始深度a开始上浮;同时第一舵机22控制胸鳍1初始位置由水平位置转动角度α1到仰翼位置,紧接着,第一舵机22和第二舵机24控制胸鳍1的摇拍翼运动。当泵油量达到k时,常闭电磁阀542断电,蠕动泵541停止泵油,此时过渡部件3内油量为x k,保持该油量,仿生鱼继续摇拍翼运动上浮。当接近目标深度b时,常闭电磁阀542通电,蠕动泵541工作,从过渡部件3泵油到油囊543内,过渡部件3体积逐渐减小,浮力逐渐减小,仿生鱼下潜速度减慢,当泵油量达到k时,停止泵油,此时过渡部件3内油量为x,同时,驱动机构2停止动作,胸鳍1复位至水平。此时仿生鱼浮力等于重力,仿生鱼受水阻力的作用,速度逐渐减小至0,仿生鱼重新悬浮在水中。仿生鱼已非常接近目标深度b,接着仿生鱼通过摇拍翼运动到达目标深度b。
68.当指令任务为上浮至水面时:
69.浮力调节机构54中常闭电磁阀542通电,同时蠕动泵控制板544控制蠕动泵541工作,从油囊543泵油到过渡部件3内,过渡部件3体积逐渐增大,此时浮力大于重力,仿生鱼从初始深度a开始上浮;浮力调节机构54动作的同时,第一舵机22控制胸鳍1初始位置由水平位置转动角度α1到仰翼位置,紧接着,第一舵机22和第二舵机24控制胸鳍1的摇拍翼运动。当泵油量达到m时,常闭电磁阀542断电,蠕动泵541停止泵油,此时过渡部件3内油量为x m,保持该油量,继续上浮至水面。
70.本发明所述蝠鲼式仿生鱼,通过驱动机构2中第一舵机22和第二舵机24控制胸鳍1的摇拍翼运动,使仿生鱼更具灵活性,能够实现仿生鱼的前进、后退;通过改变胸鳍1初始角度,再结合胸鳍1摇拍翼运动,可以控制仿生鱼上浮、下潜。宽大的胸鳍1保证了游动时的稳定性,利用两侧胸鳍1差相运动能够实现原地转弯。
71.除此之外,本发明所述蝠鲼式仿生鱼,还利用控制系统53,实现对仿生鱼的运动控制,实现了实时读取仿生鱼传感器数据,包括位姿、深度、压力和经纬度等数据,以及通过摄像头536实时获取水下图像和视频。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
